一种交叉驱动式鱼雷锚的装置及驱动方法
- 国知局
- 2024-08-01 06:22:14
本发明属于系泊基础装置,特别涉及一种交叉驱动式鱼雷锚的装置及驱动方法。
背景技术:
1、我国海洋资源勘探向深海转移,对海洋石油平台和平台锚泊基础提出较高的要求。目前广泛应用的深水锚基础主要有吸力锚、普通滚动锚、杆锚、振动深锚、动力贯入锚等。其中,鱼雷锚是最新发展的深海锚基础形式,具有造价经济、安装简单高效、锚泊性能佳等突出特点,尤其是克服了传统锚基础安装成本严重依赖水深的缺点,是目前最具发展前景的深水锚基础。目前遇到的问题是鱼雷锚主要依靠自身重力来贯入土体,但是贯入深度取决于地层的坚硬程度,对于坚硬的砂土地层中,锚体仅靠自重难以达到指定土层,承载能力不能满足设计要求。
2、检索发现,申请号为202010027392.6《一种可加深锚固长度的鱼雷锚》提供了一种可加深锚固长度的方案,利用电机顶推刀片,通过切割土层加深锚固长度、提升鱼雷锚抗拔能力。但是这种鱼雷锚仅是利用锚头的刀片来切割土层,制约了掘进的深度,并且没有控制鱼雷锚前进方向和保持稳定性的能力;申请号为201610533751.9《一种带环刺鱼雷锚》,通过在腔体内部设置穿刺机构,在拉力作用穿刺成一个平面,提高鱼雷锚的承载力。但是这种鱼雷锚在初始贯入深度处进行平面展开刺刀来提高鱼雷锚的承载力,无法加深其贯入深度。
3、综上所述,现有技术存在以下缺点:无法对土层进行持续有效掘进,靠单一整体推进需要较大动力,前进阻力比较大,且没有固定贯入方向的能力,容易发生倾斜,导致掘进效率严重降低。对于无法驱动加深锚固深度的鱼雷锚,单纯依靠在初始贯入深度处进行平面展开刺刀的方法,其承载力的发挥又严重依赖鱼雷锚自身的重力和土层的软硬程度,如果贯入深度不理想,鱼雷锚的承载力难以得到发挥。对于坚硬的土层,增加初始贯入深度则需要提高自身重力,这样就需要额外的材料用量、制作成本和运输安装成本。
4、因此,现有技术难以克服鱼雷锚掘进阻力,且贯入过程无法控制其前进方向,容易发生偏斜,影响掘进效率,其承载力的发挥很难有更大程度的提高。
技术实现思路
1、本发明的目的在于解决现有技术存在的不足和缺陷,提供了一种交叉驱动式鱼雷锚的装置与驱动方法,采用转轴沿轴向上下移动带动a、b段锚身通过螺纹连接产生轴向相对运动,形成间隙增大和间隙闭合两种变化过程,结合对翼板交叉伸出、缩回的控制实现锚体的交叉向下驱动,将鱼雷锚持续向海底推进,解决鱼雷锚贯入深度不足、不利于鱼雷锚承载力发挥的问题。
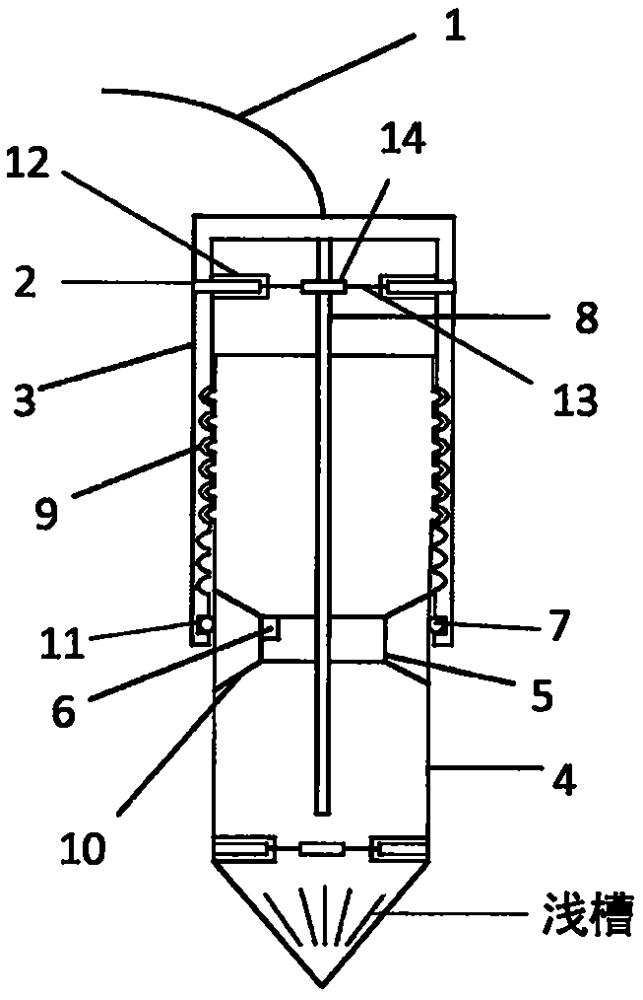
2、一种交叉驱动式鱼雷锚的装置,包括锚链1、翼板2、b段锚身3、a段锚身4、步进电机5、电池6、密封圈7、转轴8、螺纹9、钢筋条10、凹槽11、滑槽12、推杆13、微型电机14;
3、所述b段锚身3内径与a段锚身4外径一致,a段锚身4和b段锚身3通过螺纹9相连接;
4、所述密封圈7放置在b段锚身3内侧的凹槽11内,用于防止外部的土体和水进入鱼雷锚内部;
5、所述钢筋条10将步进电机5固定在a段锚身4中部,钢筋条10每两根之间夹角为120度,钢筋条10向步进电机8外侧倾斜,使得步进电机5与a段锚身4连接更稳定;
6、所述电池6安装在步进电机5内部;
7、所述转轴8穿过步进电机5,并在步进电机5的控制下旋转并沿轴向上下移动;
8、所述转轴8后端与b段锚身3后端板焊接为一体,转轴8沿轴向上下移动带动b段锚身3与a段锚身4产生同轴相对旋转,并通过螺纹9连接产生轴向相对运动,形成间隙增大和间隙闭合两种变化过程,同时引起鱼雷锚产生长度增加和减小;
9、所述翼板2在b段锚身3和a段锚身4上分别对称布置,相邻翼板2相互垂直,与推杆13相连接,推杆13可伸缩;
10、所述翼板2在微型电机14驱动下受推杆13推力作用下沿滑槽12向鱼雷锚外部滑动,形成翼板2伸出状态,反之形成翼板2缩回状态,不露出鱼雷锚;
11、所述翼板2在伸出状态时,对应的b段锚身3或a段锚身4在后方土体下压力、土体对翼板2旋转约束力以及对应锚身的侧向旋转摩阻力约束下保持稳定不旋转状态;
12、所述a段锚身4的锚头设置多个条形浅槽,便于a段锚身4向下钻进阶段切削前方土体。
13、一种交叉驱动式鱼雷锚的驱动方法,采用上述的交叉驱动式鱼雷锚的装置连接,具体步骤如下:
14、①使用锚链1将鱼雷锚吊住,送至指定释放地点;
15、②在指定释放地点将鱼雷锚垂直投入水中,使鱼雷锚自由落体射入海底河床内部,这是鱼雷锚自由贯入阶段;
16、③待鱼雷锚稳定后将b段锚身3内的翼板2从凹槽11内伸出,使得b段锚身3固定于土层中;
17、④启用步进电机5,驱使a段锚身4在步进电机5驱动下旋转向下移动,与b段锚身3间隙增大,使得a段锚身4向深度增大的方向贯入到海底土层,这是a段锚身4向下钻进阶段;
18、⑤当a段锚身4下移至间隙增大极限值时,伸出a段锚身4内的翼板2,缩回b段锚身3的翼板2,使得a段锚身4固定于土层中;
19、⑥反向驱动步进电机5,b段锚身3由于相对作用绕螺纹9转动向下驱动,逐渐向a段锚身4并拢至间隙闭合状态,这是b段锚身3向下闭合阶段;
20、⑦再将a段锚身4的翼板2缩回,伸出b段锚身3的翼板2,重复步骤③~⑥,使得鱼雷锚持续向海底推进,直到前进到设定的目标贯入深度为止,停止鱼雷锚的推进工作;
21、⑧最后将a段锚身4、b段锚身3设置为间隙增大至极限值状态,将a、b段锚身的翼板2全部伸出,使得a段锚身4和b段锚身3同时嵌固的状态,鱼雷锚随后进入服役阶段。
22、进一步地,通过a段锚身4、b段锚身3间隙增大造成鱼雷锚的伸长,增大了鱼雷锚的抗拔承载力;上下翼板2同时伸出,形成锚身前端和后端同时固定于地层的状态,增加了鱼雷锚的抗拔承载力和抗倾覆的稳定性。
23、进一步地,通过步进电机5的往复操作,带动a、b段锚身交叉驱动,将鱼雷锚持续向海底推进,实现鱼雷锚埋置深度增加,提高其抗拔承载力的目标。
24、有益效果
25、本发明提供了一种交叉驱动式鱼雷锚的装置及驱动方法,该装置包括锚链1、翼板2、b段锚身3、a段锚身4、步进电机5、电池6、密封圈7、转轴8、螺纹9、钢筋条10、凹槽11、滑槽12、推杆13、微型电机14;所述转轴沿轴向上下移动带动a、b段锚身通过螺纹连接产生轴向相对运动,形成间隙增大和间隙闭合两种变化过程,结合对翼板交叉伸出、缩回的控制实现锚体的交叉向下驱动,将鱼雷锚持续向海底推进,实现鱼雷锚埋置深度增加,提高其承载力的目标。
26、本发明的优点如下:
27、1)通过转轴沿轴向上下移动带动a、b段锚身通过螺纹连接产生轴向相对运动,形成间隙增大和间隙闭合两种变化过程,结合对翼板交叉伸出、缩回的控制实现锚体的交叉向下驱动,将鱼雷锚持续向海底推进;
28、2)通过a段锚身、b段锚身间隙增大造成鱼雷锚的伸长,增大了鱼雷锚的抗拔承载力;上下翼板同时伸出,形成锚身前端和后端同时固定于地层的状态,增加了鱼雷锚的抗拔承载力和抗倾覆的稳定性;
29、3)从贯入深度增加、锚体增长和上下端翼板固定提高锚体抗拔稳定性等方面来解决鱼雷锚贯入深度不足、不利于鱼雷锚承载力发挥的问题。
30、4)因为鱼雷锚自身可以掘进,就不需要过分依赖鱼雷锚自身重力来提高贯入深度,能够实现鱼雷锚轻量化制作,减少材料用量,节省制作成本以及运输和安装成本。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223530.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表