一种螺纹压电作动器驱动的全海深释放机构及其工作方法
- 国知局
- 2024-08-01 06:25:21
本发明涉及压电驱动和深海声学探测装备领域,尤其涉及一种螺纹压电作动器驱动的全海深释放机构及其工作方法。
背景技术:
1、各种水声设备是海洋开发的探索者和海洋环境的重要监测装置,早期的海洋探测设备和水文监测设备在任务结束后大多依靠升降机回收或人力潜水回收,存在成本高,回收复杂的问题。为了解决上述问题,各类释放机构应运而生。当海洋探测设备布放在海域时,其携带的释放机构通过外挂锚定配重块使探测器整体处于负浮力状态,使探测设备可以实现无动力下沉当探测任务结束后需要回收时,释放机构在接收水面甲板单元的信号后,释放水下的锚定配重块,使整体处于正浮力状态,实现探测器整体的无浮力上升。目前,综上所述,深海探测器释放机构的驱动源主要有电磁电机驱动式、气动式、烧蚀式和电磁式。他们存在无法快速二次部署、结构复杂、对水下的密封要求极高、可靠性差和无自锁等不足等缺陷。
2、压电作动器是一种基于逆压电效应的驱动器,能够通过压电陶瓷激发出定子的高频微幅振动,从而对转子实现驱动。其具备结构简单和断电自锁等特点,适用于释放机构的驱动。并且其开放式结构无需考虑高强度密封,使其能够适应各种海洋深度。
3、在现有的压电驱动释放机构的设计中(专利公开号:cn115636053a),需要两个压电作动器同时工作,相互配合驱动锁体打开,实现对配重块的释放。双作动器的设计不仅提高了释放机构的成本,而且增加了结构装配的难度,同时降低了释放机构的可靠性。并且为了实现锁体的自锁功能,整个释放机构需要设计多个传动组件,整个机构存在结构复杂和尺寸大的问题。
技术实现思路
1、本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种螺纹压电作动器驱动的全海深释放机构及其工作方法。
2、本发明为解决上述技术问题采用以下技术方案:
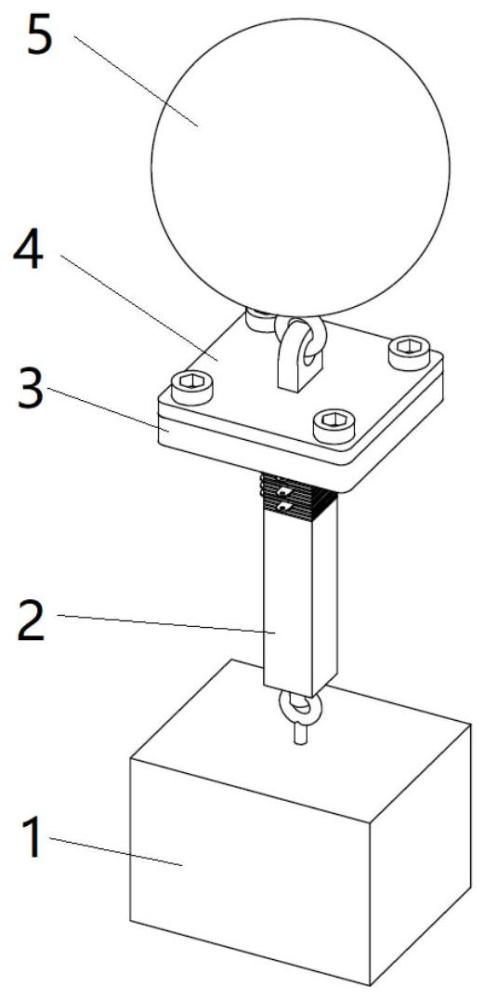
3、一种螺纹压电作动器驱动的全海深释放机构,包含螺纹压电作动器、装载壳体、连接板、浮体、配重块和固定螺栓;
4、所述螺纹压电作动器包含前梁、压电组件、后梁、固定板和预紧螺栓;
5、所述前梁为正四棱柱,其上端面中心设有用于和所述预紧螺栓相配合的第一螺纹盲孔,下端面中心设有用于和所述固定螺栓相配合的第二螺纹盲孔;
6、所述压电组件包含4s个压电陶瓷片组和4s+1个电极片,s为大于等于1的自然数;
7、所述压电陶瓷片形状和前梁的横截面相同,采用中心设有通孔的双分区压电陶瓷片,沿厚度方向极化,且极化分界线两侧的两个分区具有相反的极化方向;
8、所述电极片形状和前梁的横截面相同,中心设有通孔;
9、所述4s+1个电极片和4s个压电陶瓷片依次交替层叠布置形成正四棱柱,其中,所述第4i+1个压电陶瓷片的极化分界线共面且极化方向相同,第4i+2个压电陶瓷片的极化分界线共面且极化方向相同,第4i+3个压电陶瓷片的极化分界线共面且极化方向相同,第4i+4个压电陶瓷片的极化分界线共面且极化方向相同,i为大于等于0小于s的自然数;所述第1个、第2个压电陶瓷片的极化分界线共面且极化方向相反,第3个、第4个压电陶瓷片的极化分界线共面且极化方向相反;
10、所述后梁为横截面和前梁的横截面相同的正四棱柱,其沿轴线设有通孔;
11、所述固定板中心设有用于和所述预紧螺栓的沉头通孔;
12、所述预紧螺栓依次穿过固定板、后梁、压电组件后和前梁的第一螺纹盲孔螺纹相连,将后梁、压电组件夹紧在固定板和前梁之间;
13、所述装载壳体中空且密闭,用于装载海洋探测设备、通信设备、电源以及控制模块;装载壳体的下端面和所述固定板固连,上端面和所述连接板的下端面固连;
14、所述连接板上端面中心设有第一挂环;
15、所述浮体上设有第二挂环,用于提供浮力;所述第一挂环、第二挂环相互铰接;
16、所述固定螺栓和所述前梁的第二螺纹盲孔螺纹相连,固定螺栓的下端设有第三挂环;
17、所述配重块上设有第四挂环,用于提供负重对水深进行锚定;所述第三挂环、第四挂环相互铰接。
18、作为本发明一种螺纹压电作动器驱动的全海深释放机构进一步的优化方案,所述前梁、后梁、固定板均采用铝合金、钛合金、不锈钢中的任意一种制成。
19、作为本发明一种螺纹压电作动器驱动的全海深释放机构进一步的优化方案,所述压电陶瓷片、电极片和海水接触的表面上均设有绝缘涂层。
20、作为本发明一种螺纹压电作动器驱动的全海深释放机构进一步的优化方案,所述绝缘涂层采用环氧树脂胶或硫化胶。
21、作为本发明一种螺纹压电作动器驱动的全海深释放机构进一步的优化方案,所述预紧螺栓和固定板之间设有防松垫圈。
22、作为本发明一种螺纹压电作动器驱动的全海深释放机构进一步的优化方案,所述固定板、连接板的中心均位于所述前梁的轴线上。
23、本发明还公开了一种该螺纹压电作动器驱动的全海深释放机构的工作方法,包含以下步骤:
24、进行水下探测时,固定螺栓和前梁螺纹配合并旋紧,配重块提供负重对水深进行锚定,即利用配重块的重力和浮体的浮力使其在海中保持预设的深度;
25、当水下探测工作完毕需要对装置进行回收时,对第4i+1个、第4i+2个压电陶瓷片施加第一交流电信号,对第4i+3个、第4i+4个压电陶瓷片施加第二交流电信号;所述第一、第二交流电信号具有90°时间相位差,同时激发出螺纹压电作动器两个空间上正交的p阶弯曲振动模态,使得前梁第二螺纹盲孔中螺纹上质点通过摩擦运动驱动固定螺栓旋转,最终使得固定螺栓和前梁分离,p为大于等于1的自然数;
26、固定螺栓和前梁分离后,配重块被释放,浮体带动装载壳体浮出水面,等待回收。
27、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
28、1. 本发明通过螺纹压电作动器作为释放机构的驱动器。螺纹压电作动器直接驱动固定螺栓实现对配重块的释放,无需传动机构。相较现有的设计(专利公开号:cn115636053a),本发明能够在释放过程中实现了对配重块的直接驱动。同时本发明所需装配部件少,仅需一个压电作动器工作就能够实现对固定螺栓的释放,具有成本低、尺寸小、结构简单和可靠性高的优势。
29、2. 本发明中螺纹压电作动器的与固定螺栓之间为螺纹配合,螺纹配合具备自锁的功能,利用该特性,本发明中所提出的释放机构能够在释放之前保持配重块锚定。在装置回收之后,仅需再次将带固定螺栓的配重块旋入螺纹压电作动器中即可进行再次部署。
30、3. 本发明中无需对整个释放机构进行全密封,只需要保证螺纹压电作动器中压电陶瓷片与电极片与海水绝缘即可,密封要求极低,能够适应全海深环境。
技术特征:1.一种螺纹压电作动器驱动的全海深释放机构,其特征在于,包含螺纹压电作动器、装载壳体、连接板、浮体、配重块和固定螺栓;
2.根据权利要求1所述螺纹压电作动器驱动的全海深释放机构,其特征在于,所述前梁、后梁、固定板均采用铝合金、钛合金、不锈钢中的任意一种制成。
3.根据权利要求1所述螺纹压电作动器驱动的全海深释放机构,其特征在于,所述压电陶瓷片、电极片和海水接触的表面上均设有绝缘涂层。
4.根据权利要求3所述螺纹压电作动器驱动的全海深释放机构,其特征在于,所述绝缘涂层采用环氧树脂胶或硫化胶。
5.根据权利要求1所述螺纹压电作动器驱动的全海深释放机构,其特征在于,所述预紧螺栓和固定板之间设有防松垫圈。
6.根据权利要求1所述螺纹压电作动器驱动的全海深释放机构,其特征在于,所述固定板、连接板的中心均位于所述前梁的轴线上。
7.基于权利要求1所述螺纹压电作动器驱动的全海深释放机构的工作方法,其特征在于,包含以下步骤:
技术总结本发明公开了一种螺纹压电作动器驱动的全海深释放机构及其工作方法,释放机构包含螺纹压电作动器、装载壳体、连接板、浮体、配重块和固定螺栓。其中,浮体固定在连接板上;装载壳体上端和连接板相连、下端和螺纹压电作动器相连;固定螺栓和螺纹压电作动器下端螺纹配合,且固定螺栓和配重块连接。在配重块和浮体的配合下,装载壳体能够保持在预设深度的深海工作。当工作完毕后,通过螺纹压电作动器通过驱动固定螺栓转动,使得固定螺栓和螺纹压电作动器脱离,装载壳体在浮体的作用下浮出水面等待进行回收。本发明利用压电驱动的原理实现机构的释放功能,能够适应全海深环境,具有结构简单、重量轻、成本低和密封简单的特点。技术研发人员:贾博韬,王亮,李爽,王瑞君受保护的技术使用者:南京航空航天大学技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/223764.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表