一种基于波浪能发电装置的无人水面航行器及控制方法
- 国知局
- 2024-08-01 06:25:23
本发明涉及无人航行器,尤其是涉及一种基于波浪能发电装置的无人水面航行器及控制方法。
背景技术:
1、无人水面航行器(unmanned surface vehicle,usv)可用于军事侦察、海上安保、海洋环境探测和海上搜救等任务。无人水面航行器一般采用化石燃料和化学电池作业动力来源,但面对日益复杂化的任务需求,无人水面航行器自身能源带载量不足的问题逐渐凸显。利用海洋环境能源为无人水面航行器提供动力和电力,是解决能源瓶颈问题的有效手段。
2、波浪能是一种潜力巨大,分布广泛、能量密度高的清洁新能源。相较于太阳能、风能、温差能,波浪能收集设备可以在90%时间内进行能量捕获,且波浪能的能量密度更高,是太阳能的15倍,风能的4倍。
3、目前已有的波浪能无人水面航行器按原理主要分为两类:第一类是直接利用波浪对安装在船体上的水动翼的激励作用产生推进力,如美国liquid robotics公司研发的波浪滑翔机(wave glider),此种方案不产生电能,需要安装太阳能电池板用于控制系统和通讯系统供电;第二类是利用波浪能发电装置产生电能,用于航行器的推进和控制,目前已有多种船载波浪能发电装置技术方案,如:武汉理工大学朱风坤等人提出一种摆翼式波浪能发电装置用于auv的能量供给,通过波浪作用下摆翼的摆动驱动旋转电机实现能量的收集;英国埃克塞特大学的james graves等人提出一种适用于低频振动环境的摆式能量收集器,主要原理是通过一个悬挂的惯性摆锤收集船体横摇的能量,并利用齿轮组离心器进行机械整流;瑞典n.townsend等人提出一种新型陀螺系统,该系统采用万向节飞轮机构能够利用船体与波浪的相对运动产生电能;液压式波浪能发电装置,首先将捕获到的波浪能经过液压缸往复运动储存在蓄能器中,然后通过驱动液压马达带动发电机运动发电,能量经机械能-液压能-机械能-电能多级转换过程,机构复杂,且发电效率较低。
4、目前利用波浪能的无人水面航行器存在还存在以下不足和缺陷:
5、直接利用波浪激励产生推进力的无人水面航行器受海况制约,水动翼产生的推进力易受波浪等级的影响,在完全无浪的情况下,几乎失去动力。此外,不能向控制、导航、传感和通信系统供电,需要借助其他供电方式。
6、波浪滑翔机作为当前主流波浪能水面无人航行器类型,采用水面和水下分体结构,并采用多片式水动翼作为牵引机,结构复杂,制造成本高,布放回收难度大,且易受恶劣海况影响发生损坏,易发生腐蚀和海洋生物附着。
7、利波浪能发电装置获取电能的方案中,普遍采用复杂传动系统将机械能变为液压能,或将直线运动转换为旋转运动再带动发电机,从而在发电过程中需要经过多级能量转换,导致能量转换效率低下,系统复杂度提升,成本增加,难以进行有效控制和高效发电。
8、已有水面航行器的波浪能发电装置的俘能运动普遍不针对系统动力学模型采取控制措施,发电能效较低。众所周知,波浪频率和波幅具有随机性和不确定性,主动控制波浪能发电装置的俘能运动使其与波浪发生共振才能够俘获最大能量。然而已有的用于水面航行器的波浪能发电装置没有俘能运动控制系统,发电量效率低,不能满足水面航行器总体供电需求。
技术实现思路
1、本发明的目的是提供一种基于波浪能发电装置的无人水面航行器及控制方法,解决了没有俘能运动控制系统,发电量效率低,不能满足水面航行器总体供电需求的问题。
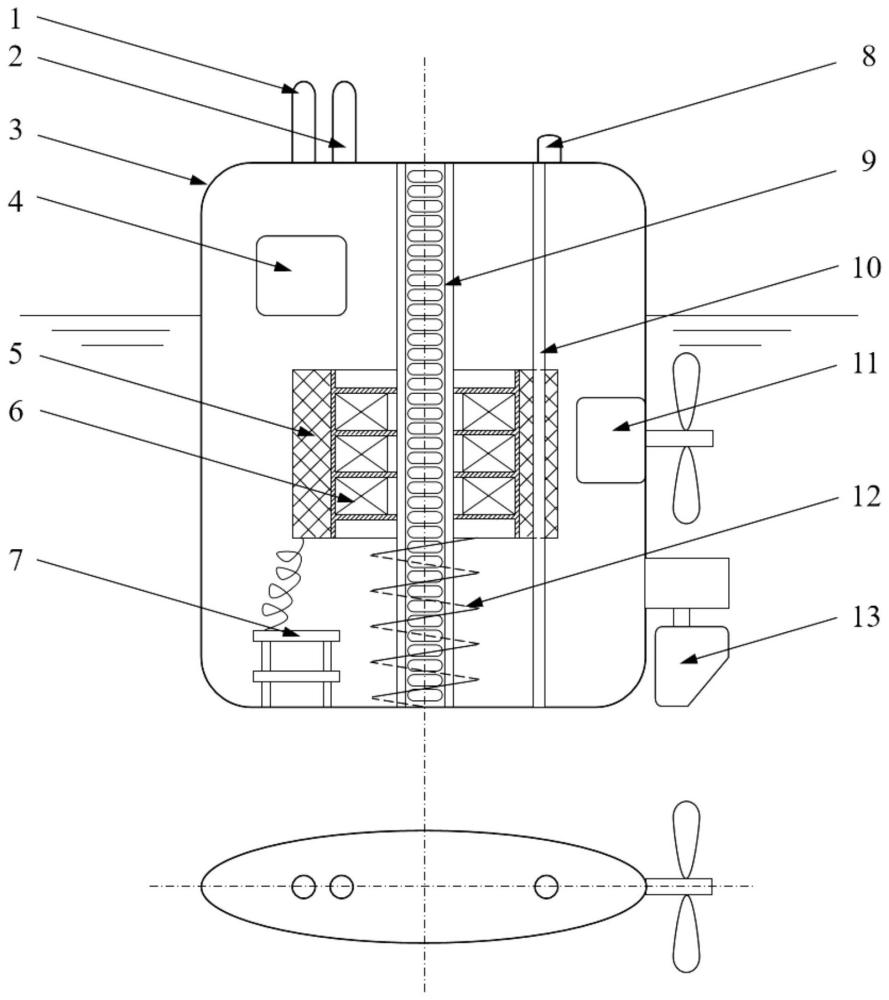
2、为实现上述目的,本发明提供了一种基于波浪能发电装置的无人水面航行器,包括无人水面航行器舱体,所述无人水面航行器舱体内部中央处设置有供电系统,所述供电系统的一侧设置有无人水面航行器控制单元,所述无人水面航行器舱体的顶部设置有通讯模块,所述无人水面航行器舱体外表的一侧分别设置有推进器和舵机。
3、优选的,所述供电系统包括直线发电机定子永磁体,所述直线发电机定子永磁体外表面连包覆有直线发电机动子线圈,所述直线发电机动子线圈外表面套设有蓄电池组,所述蓄电池组与发电管理单元电性连接,且穿过直线轨道。
4、优选的,所述直线发电机动子线圈的底部与辅助弹簧的一端固定连接,所述辅助弹簧的另一端与所述无人水面航行器舱体内表面的底部固定连接。
5、优选的,所述无人水面航行器舱体为中空柱体结构,且横截面呈流线形。
6、优选的,所述直线发电机动子线圈和所述蓄电池组均为空心圆柱体结构。
7、优选的,所述通讯模块包括卫星通讯模块、无线通讯模块和频闪灯,所述卫星通讯模块和所述无线通讯模块位于位于所述无人水面航行器舱体顶部的一侧,所述频闪灯位于所述无人水面航行器舱体顶部的另一侧。
8、一种基于波浪能发电装置的无人水面航行器的控制方法,包括以下步骤:
9、s1、对无人水面航行器在波浪中的受力分析,建立无人水面航行器的动力学模型;
10、s2、利用发电管理单元控制交轴电流方向及大小,控制波浪力与俘能运动速度成比例的阻尼力、与俘能运动位移成比例的弹簧力以及与俘能运动加速度成比例的惯性力三者的合成力;
11、s3、根据俘能运动与波浪速度共振条件,得到反电磁力等效刚度及阻尼大小;通过航行器搭载的传感器得到当前位置及速度信息,结合所需的直线发电机交轴电流大小,利用发电管理单元及相应算法以控制直线发电机交轴电流满足预期要求。
12、优选的,在步骤s1中,根据势流理论及浮体水动力基础,将波浪力划分为激振力ff、辐射力fr、静水恢复力fh。动子线圈与定子永磁体相对运动时产生反电磁力fe,根据牛顿第二定律建立动力学模型如下:
13、
14、其中,m1为无人水面航行器舱体质量,m2为直线发电机动子线圈与蓄电池组组合体质量;x1为水面航行器壳体相对大地坐标系的位移;x2为直线发电机动子线圈相对大地坐标系的位移;xr为俘能运动的位移。
15、优选的,在步骤s2中,控制反电磁力fe并能够将其效为与俘能运动速度成比例的阻尼力、与俘能运动位移成比例的弹簧力以及与俘能运动加速度成比例的惯性力三者的合成力;即
16、
17、将动力学方程整理为矩阵形式
18、
19、其中,a为波浪波高,ω为波浪遭遇频率;ρgs为净水恢复力等效刚度,ρ为海水密度,g为重力加速度,s为航行器水面截面积;ζ为辐射力等效阻尼;k为反电磁力等效刚度,c反电磁力等效阻尼。
20、优选的,在步骤s2中,波浪能发电装置的俘能运动在与波浪速度共振时能够俘获更大的能量。根据以上动力学方程,可获得俘能运动速度幅值响应函数如下:
21、
22、其特征根方程为零时,俘能运动与角频率为ω的波浪达到速度共振:
23、[(ρgs-m1ω2)(k-m2ω2)-(km2+ζc)ω2]2+[(ρgs-m1ω2)cω-m2(ζ+c)ω3+kζω]2=0。
24、因此,本发明采用上述结构的一种基于波浪能发电装置的无人水面航行器及控制方法,具备以下有益效果:
25、1.本发明采用全封闭舱体结构,将波浪能捕获装置密闭于水面航行器舱体内部,可有效防止海水腐蚀和海洋生物附着,且外形简洁,无复杂附体结构,提高了无人水面航行器的海上适用性、可靠性和稳定性。
26、2.本发明所采用的无人水面航行器舱体为竖直方向狭长的中空柱体结构,横截面呈流线形,并采用等横截面积设计。该结构增大了直线发电机动子的运动空间,利于提高波浪能发电效率,流线形外形减小了无人水面航行器的航行阻力,同时等横截面积设计使航行器所受静水恢复力与航行器位移呈线性关系,大幅减小了对俘能运动的控制难度。
27、3.本发明所述水面航行器在水面航行时,在垂向波浪力作用下进行垂荡运动,在直线发电机动子线圈的惯性及辅助弹簧的滞后作用下,直线发电机动子线圈与直线发电机定子永磁体产生往复相对运动,直线发电机动子线圈切割磁感线产生电能,产生的交流电经发电管理单元整流控制转换为直流电向蓄电池组充电。波浪能发电装置采用直驱方式,由波浪激励产生的机械能经由直线发电机直接转换为电能,避免了多级能量转换造成的能量损失。
28、4.在上述发电过程中,动子线圈中感应出的电流产生反电磁力,且反电磁力与直线电机交轴电流呈线性正相关。通过合理控制交轴电流进而控制反电磁力,改变波浪能发电装置动力学特性,控制俘能运动与当前波浪发生速度共振,以实现高效波浪能捕获。
29、5.本发明所述的基于波浪能发电装置的无人水面航行器为有阻尼两自由度动力学系统,具有两个固有频率。其中任一固有频率与波浪频率相同时,均能使俘能运动与波浪形成速度共振。通过控制反电磁力改变等效刚度、等效阻尼等动力学参数,对更为接近海浪频率的系统固有频率进行调整,使其与海浪频率相同,因而具有更宽的谐振调整范围。
30、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223769.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种救援冲锋舟的制作方法
下一篇
返回列表