一种漂浮式风机舵翼集成减摇控制系统
- 国知局
- 2024-08-01 06:33:06
本发明属于海上风电领域,尤其是涉及一种漂浮式风机舵翼集成减摇控制系统。
背景技术:
1、近年来,随着海上风电的迅猛发展,近海风电资源的开发愈发饱和,而深远海区域有着更广阔的空间以及更加丰富的风能资源,因此海上风电向深远海扩展。
2、漂浮式风机利用支撑平台和锚泊系统将风电机组矗立于海上,浮式平台对于水深变化也具有更好的适应性,漂浮式风机展现出巨大的发展潜力。
3、如公开号为cn110671280a的中国专利文献公开了一种漂浮式风机基础,包括环形漂浮结构、压载舱、塔筒安装平台,所述环形漂浮结构包括刚性网箱、浮块,所述环形漂浮结构由多个所述刚性网箱首尾依次固定连接形成,所述刚性网箱内填充有所述浮块,所述压载舱设在所述环形漂浮结构的下方并与所述环形漂浮结构连接,所述塔筒安装平台设在所述环形漂浮结构的上侧;其中,所述浮块为密度小于水的材料制成,或所述浮块为空心密封结构。
4、公开号为cn111734584a的中国专利文献公开了一种漂浮式风机基础,包含:支撑结构,其位于漂浮式风机基础的中心,并与风机主体连接,用于支撑风机主体;漂浮结构,其位于支撑结构的周围,并与支撑结构连接,用于为风机基础提供浮力;系泊系统,其与漂浮结构连接,用于定位漂浮式风机基础;所述的漂浮结构包括至少三个浮体结构和至少三个连接结构,所述的连接结构分别固定连接两个相邻的浮体结构。
5、然而漂浮式风机在海上运行时,常受到多源海况环境激励的影响,其中包括波浪、潮流和风力等复杂环境因素。在这些环境条件下,漂浮式风机平台容易发生大幅度的运动响应,这可能导致风电机组产生振动、结构疲劳和性能下降等问题,对整个系统的可靠性和寿命构成挑战。
技术实现思路
1、本发明提供了一种漂浮式风机舵翼集成减摇控制系统,通过在漂浮式风机结构中集成舵翼减摇装置,采用先进的控制算法,实现对舵翼位置、角度和展开程度的准确调整,以抑制风机平台在复杂海况环境中的运动响应。
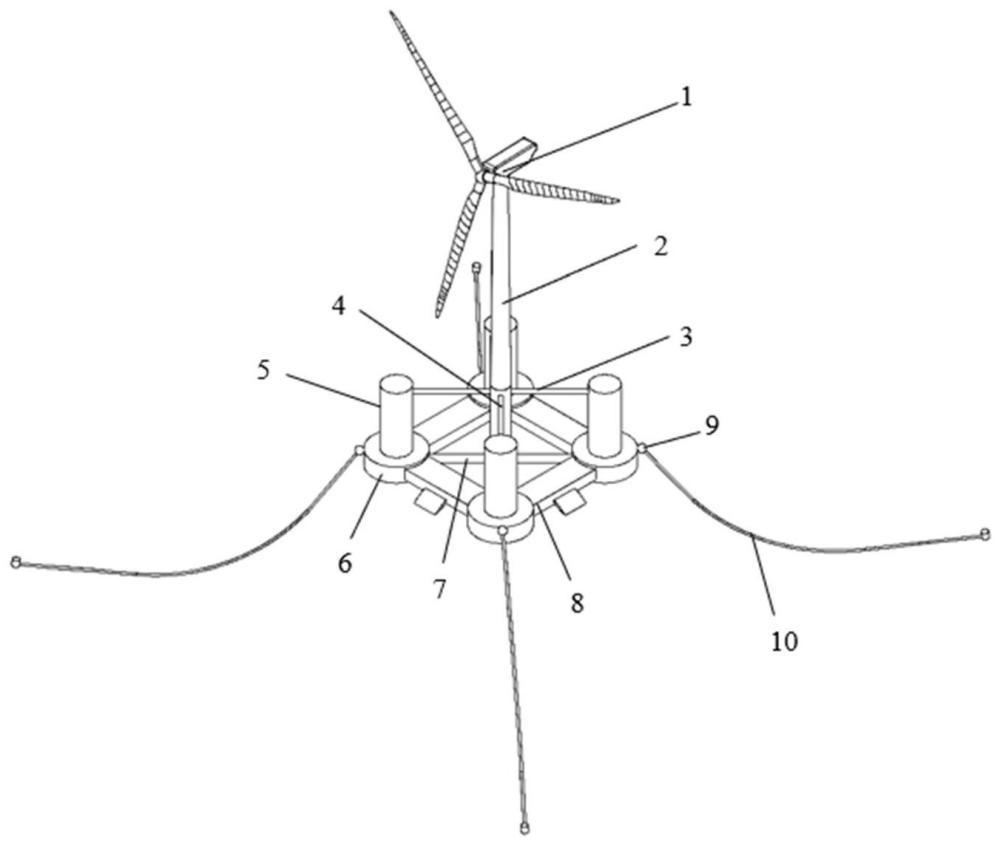
2、一种漂浮式风机舵翼集成减摇控制系统,包括设有中央立柱浮筒的漂浮式平台、安装在中央立柱浮筒上的塔筒以及安装在塔筒上部的风力发电机组;
3、所述的漂浮式平台包括四个呈正方形摆放的侧立柱浮筒,相邻两个侧立柱浮筒之间通过浮箱连接;每个侧立柱浮筒上设有侧立柱,每个侧立柱的上端通过上横撑与中央立柱浮筒连接,每个侧立柱浮筒通过下横撑与中央立柱浮筒连接;每个侧立柱浮筒通过设置的导缆孔与对应的系泊链连接;
4、每个浮箱的外侧面中心位置设有一个舵翼装置,所述的舵翼装置包括舵翼、伺服电机、液压机构和控制机构;
5、控制机构接收传感器数据进行实时计算和分析,进一步通过液压机构控制舵翼的伸出和回笼,通过伺服电机控制舵翼的转动角度和转动速度。
6、进一步地,所述的液压机构包括一个液压缸和一个传动机构,液压缸通过传动机构与伺服电机连接,所述伺服电机的输出端与舵翼的转轴相连。
7、优选地,所述的舵翼采用叶片式设计。
8、优选地,所述舵翼的展弦比为0.38~0.5。
9、进一步地,传感器数据来自姿态传感器、气象传感器以及波浪传感器;其中,气象传感器以及波浪传感器布置在漂浮式平台,姿态传感器布置在漂浮式平台和舵翼上;漂浮式平台上的姿态传感器用于实时监测到漂浮式平台运动的幅值、速度、加速度和周期;舵翼上的姿态传感器用于实时监测舵翼摆动的角度、角速度、角加速度。
10、进一步地,系泊链一端与导缆孔相连接,另一端铺设至海底;四根系泊缆关于中央立柱浮筒中心对称。
11、所述控制机构的控制过程如下:
12、首先建立漂浮式风机的状态空间动力学模型,设置初始化状态向量x、初始化自适应增益l(0),状态向量包括横摇/纵摇角速度、舵翼旋转角度和升力;
13、使用卡尔曼滤波器估计系统状态,利用传感器数据和动力学模型,提供对系统向量的实时估计,输出估计的状态向量
14、控制器的设计采用基于模型参考自适应控制算法,控制目标是确保舵翼升力fz与横摇/纵摇角速度的相位差维持在180°,同时在幅值上近似相等;
15、控制器根据控制目标得到期望的舵翼旋转角度αd,进一步计算舵翼的控制输入u,通过调整控制输入u来抑制漂浮式风机的横摇/纵摇运动;
16、将该指令信号u处理后转换为电压值传递给伺服放大模块,继而输送到伺服电机的控制器驱动舵翼工作。
17、进一步地,将四个舵翼按顺序分为一号舵翼、二号舵翼、三号舵翼和四号舵翼;所述控制器的控制目标是:使一、三号舵翼的升力fz1与横摇角速度的相位始终保持180°的差值并在幅值上近似相等,使二、四号舵翼的升力fz2和纵摇角速度的相位始终保持180°的差值并在幅值上近似相等。
18、与现有技术相比,本发明具有以下有益效果:
19、1、通过集成舵翼减摇控制系统,可以更有效地减小漂浮式风机的横摇和纵摇运动响应。进一步的,可以减轻结构和材料的疲劳程度,延长漂浮式风机的使用寿命。这对于降低维护成本和提高可靠性是有益的。
20、2、控制系统的集成设计有助于优化风机的运行,自适应控制算法的引入使得系统对不同的环境条件更具适应性。系统能够实时调整舵翼和控制参数,以适应变化的风速、波浪等外部扰动。
技术特征:1.一种漂浮式风机舵翼集成减摇控制系统,其特征在于,包括设有中央立柱浮筒(4)的漂浮式平台、安装在中央立柱浮筒(4)上的塔筒(2)以及安装在塔筒(2)上部的风力发电机组(1);
2.根据权利要求1所述的漂浮式风机舵翼集成减摇控制系统,其特征在于,所述的液压机构包括一个液压缸和一个传动机构,液压缸通过传动机构与伺服电机连接,所述伺服电机的输出端与舵翼的转轴相连。
3.根据权利要求1所述的漂浮式风机舵翼集成减摇控制系统,其特征在于,所述的舵翼采用叶片式设计。
4.根据权利要求1所述的漂浮式风机舵翼集成减摇控制系统,其特征在于,所述舵翼的展弦比为0.38~0.5。
5.根据权利要求1所述的漂浮式风机舵翼集成减摇控制系统,其特征在于,传感器数据来自姿态传感器、气象传感器以及波浪传感器;
6.根据权利要求1所述的漂浮式风机舵翼集成减摇控制系统,其特征在于,系泊链(10)一端与导缆孔(9)相连接,另一端铺设至海底;四根系泊缆(10)关于中央立柱浮筒(4)中心对称。
7.根据权利要求1所述的漂浮式风机舵翼集成减摇控制系统,其特征在于,所述控制机构的控制过程如下:
8.根据权利要求7所述的漂浮式风机舵翼集成减摇控制系统,其特征在于,将四个舵翼按顺序分为一号舵翼、二号舵翼、三号舵翼和四号舵翼;所述控制器的控制目标是:使一、三号舵翼的升力fz1与横摇角速度φ的相位始终保持180°的差值并在幅值上近似相等,使二、四号舵翼的升力fz2和纵摇角速度的相位始终保持180°的差值并在幅值上近似相等。
技术总结本发明公开了一种漂浮式风机舵翼集成减摇控制系统,包括设有中央立柱浮筒的漂浮式平台、安装在中央立柱浮筒上的塔筒以及安装在塔筒上的风力发电机组;漂浮式平台包括四个正方形摆放的侧立柱浮筒,相邻侧立柱浮筒之间通过浮箱连接;每个侧立柱浮筒上设有侧立柱,侧立柱上端通过上横撑与中央立柱浮筒连接,侧立柱浮筒通过下横撑与中央立柱浮筒连接;每个浮箱的外侧面中心设有一个舵翼装置,舵翼装置包括舵翼、伺服电机、液压机构和控制机构;控制机构接收传感器数据进行实时计算分析,通过液压机构控制舵翼的伸出和收回,通过伺服电机控制舵翼的转动角度和转动速度。本发明可实现对舵翼位置、角度和展开程度的准确调整,以减少复杂海况的影响。技术研发人员:司玉林,杨璟青,孙吉莉,陈政,钱鹏,张大海受保护的技术使用者:浙江大学技术研发日:技术公布日:2024/4/29本文地址:https://www.jishuxx.com/zhuanli/20240722/224197.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表