一种充气无人驾驶保洁船及其使用方法与流程
- 国知局
- 2024-08-01 06:38:11
本技术涉及无人船的领域,尤其是涉及一种充气无人驾驶保洁船及其使用方法。
背景技术:
1、部分河道中长时间存在大量的漂浮物,如垃圾袋、枯枝烂叶、生活废弃物以及水浮莲等。漂浮物的存在不仅严重影响河道景观,同时还会对河道生态环境产生严重影响,因此,需要定期对河道的漂浮物进行清理,以维持河道正常的生态环境。
2、目前,在进行河道漂浮物清理时,通常是由清理人员乘坐船只并通过网兜等清理工具将河道中的漂浮物等捞入至船只内,以实现对河道漂浮物的清理。以上清理方式清理效率较低,且清理人员在水中作业存在一定的安全隐患;因此,存在改进空间。
技术实现思路
1、为了便于河道上漂浮物的清理,本技术提供了一种充气无人驾驶保洁船及其使用方法。
2、本技术提供的一种充气无人驾驶保洁船及其使用方法,采用如下的技术方案:
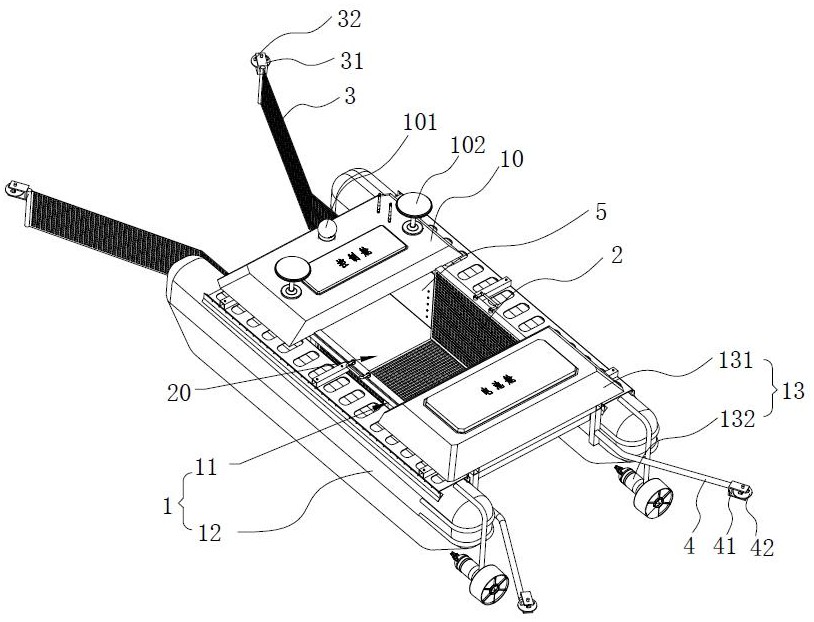
3、一种充气无人驾驶保洁船,包括船体与清理收集机构;
4、所述船体上设置有控制模块与动力模块,所述动力模块与控制模块电连接,所述控制系统用于通过所述动力系统对所述船体的行进进行控制;
5、所述船体包括支撑架,所述支撑架相对两侧均设置有浮体;
6、所述清理收集机构包括拦截网箱,所述拦截网箱可拆卸架设于所述支撑架且所述拦截网箱位于两所述浮体之间,所述拦截网箱底部延伸至所述浮体底部,所述拦截网箱靠近所述船体船头端的一侧开口设置以形成开口侧。
7、通过采用上述技术方案,将船体投放至待清理河道后,控制模块控制动力模块带动船体在待清理的河道上行进,船体行进过程中,河道表面的漂浮物流向船体的两组浮体之间并最后被两组浮体之间的拦截网箱所拦截,后续通过控制模块控制动力模块带动船体以及拦截网箱所拦截的漂浮物移动至河道岸边,便可实现河道漂浮物的清理;相比传统通过清洁人员驾驶小船通过网兜等打捞的方式效率更高,且有利于减少人工水上作业所带来的安全隐患。通过拦截网箱可拆卸于支架,后续可将拦截网箱从支撑架上移出以清除拦截网箱拦截收集的漂浮物。
8、优选的,所述支撑架靠近所述船体船头端竖直设置有两块导流板,两块所述导流板分别位于两处所述浮体相对一侧,两块所述导流板均伸出所述船体的船头端并朝向相互远离的方向倾斜延伸以形成扩口状。
9、通过采用上述技术方案,船体行进过程中,通过船体船头端的两端导流板对水面上的漂浮物进行拦截并导流至两组浮体之间的拦截网箱,有利于拦截网箱更易于拦截收集漂浮物。
10、优选的,所述导流板上均开设有若干透水孔。
11、通过采用上述技术方案,船体行进过程中,河水可通过导流板上透水孔流过透水板,而漂水物则被导流板所拦截并导流向两组浮体之间,并最终被拦截网箱所拦截上,有利于减少船体行进过程中的阻力,便于船体更加平稳顺畅地在河道上行进。
12、优选的,所述支撑架包括两根平行设置的纵向杆,两根所述纵向杆分别位于两处所述浮体相近一侧,所述拦截网箱顶部外周均弯折有翻边,所述拦截网箱通过所述翻边搭接于所述支撑架的两处所述纵向杆上。
13、通过采用上述技术方案,安装拦截网箱时,拦截网箱放入至两组纵向杠之间并使拦截网箱顶部的翻边搭接在两组纵向杆上,便可实现将拦截网箱可拆卸架设在支撑架上,便于拦截网箱拆装于支撑架,使得后续拦截网箱内拦截收集的漂浮物的清理更加简单方便。
14、优选的,两处所述导流板远离支撑架的一端均竖直转动架设有第一防撞轮;所述支撑架靠近所述船体船尾端的一端还架设有两根支撑杆,两根所述支撑杆分别位于两处所述浮体相近一侧,两根所述支撑杆均伸出所述船体的船尾端并朝向相互远离的方向倾斜延伸以形成扩口状,所述支撑杆远离所述支撑架的一端均竖直转动架设有第二防撞轮,所述第一防撞轮与所述第二防撞轮均低于所述浮体顶部。
15、通过采用上述技术方案,船体在狭窄的河道上行进时,可通过两组第一防撞轮以及两组第二防撞轮对船体进行限位,以减少船体行进中与河道两边的石块或墙体摩擦,导致船体受损的情况。
16、优选的,所述拦截网箱开口侧底部铰接有网孔板,所述浮体上方均架设有卷扬机,所述卷扬机缆绳与所述网孔板的活动端可拆卸连接;
17、当所述船体在河道上行进前,所述卷扬机驱使所述网孔板朝向远离所述拦截网箱的方向向下摆动,直至所述网孔板的活动端低于所述拦截网箱底部;
18、当所述船体从河道返回河道岸边时,所述卷扬机驱使所述网孔板朝向靠近所述拦截网箱的方向向上摆动,直至所述网孔板封堵所述拦截网箱的开口侧。
19、通过采用上述技术方案,船体在河道上行进时,河道中部分漂浮物如水浮莲等的根系通常延伸至水面以下,导致其容易被拦截网箱开口侧底部所拦截而无法正常流入船体的拦截网箱内,最终堆积在拦截网箱的开口侧;在投放无人驾驶保洁船前,先由卷扬机驱使网孔板向下摆动直至网孔板的活动端低于拦截网箱底部;后续船体在河道上行进过程中,水浮莲根系发达的漂浮物先流入两浮体之间并堆积在网孔板上方;后续当船体从河道返回河道岸边时,通过卷扬机驱使网孔板向上摆动至网孔板封堵开口侧,一方面将堆积在拦截网箱开口侧的水浮莲等漂浮物捞起并倒入至拦截网箱内;另一方面可通过网孔板限制船体在河道上行进过程中,拦截网箱内的漂浮物飘出流出拦截网箱外。
20、优选的,所述控制模组还与所述卷扬机电连接,用于通过所述卷扬机控制所述网孔板的摆动;
21、当所述船体在河道上行进前,所述控制模组控制所述卷扬机驱使所述网孔板朝向远离所述拦截网箱的方向向下摆动,直至所述网孔板的活动端低于所述拦截网箱底部;
22、当所述船体在河道上行进或从河道返回河道岸边时,所述控制模组根据用户操控指令控制所述卷扬机驱使所述网孔板朝向靠近所述拦截网箱的方向向上摆动,直至所述网孔板封堵所述拦截网箱的开口侧。
23、通过采用上述技术方案,当船体在河道行进过程中,若拦截网箱已经装满漂浮物时,控制模组可根据用户操控指令提前控制网孔板向上摆动以封堵拦截网箱的开口侧,限制后续船体行进过程中,拦截网箱内漂浮物流出拦截网箱外的情况。
24、优选的,所述拦截网箱的开口侧顶部设置有连接件,所述网孔板的活动端设置有与所述连接件相互配合的连接部;当所述网孔板活动端的所述连接部与所述拦截网箱开口侧的所述连接件连接配合时,所述网孔板封堵所述拦截网箱开口侧。
25、通过采用上述技术方案,后续需要将拦截网箱从支撑架上拆除以清理拦截网箱内漂浮物时,先通过控制模块控制卷扬机驱使网孔板向上摆动至竖直状态,再将网孔板活动端的连接部与拦截网箱开口侧顶部的连接件连接配合,最后断开卷扬机缆绳与网孔板活动端的连接,将拦截网箱从支撑架上移出;通过将网孔板活动端的连接部与拦截网箱开口侧顶部的连接件连接配合,可在断开卷扬机缆绳与活动板之间的连接后,限制网孔板发生摆动,以使网孔板可以更加稳固地封堵拦截网箱的开口侧,便于后续将拦截网箱从支撑架上移出时,拦截网箱内的漂浮物不易掉出拦截网箱的开口侧。
26、优选的,一种无人驾驶保洁船的使用方法,包括以下步骤:
27、s1:船体投放:将船体放入至待清理的河道内;
28、s2:漂浮物拦截收集:通过控制模块控制动力模块带动船体在河道上行进,通过船体上的拦截网箱拦截收集河道上的漂浮物;
29、s3:船体回收:具体步骤如下:
30、通过控制模块控制动力模块带动船体返回河道岸边,清理拦截网箱内漂浮物。
31、通过采用上述技术方案,控制模块控制动力模块带动船体在河道上行进,船体行进过程中,通过位于船体两浮体之间拦截网箱对河道上漂浮物进行拦截收集,之后通过控制模块控制动力模块带动船体返回河道岸边后,将拦截网箱从船体支撑架上拆除,以清理拦截网箱内拦截收集的漂浮物,相比传统由人工清理河道漂浮物的清理方式,有利于提升河道漂浮物的清理效率。
32、综上所述,本技术包括以下至少一种有益技术效果:
33、1.通过船体的支撑架上架设有拦截网箱,拦截网箱靠近船体船头端的一侧开口形成的开口侧,将船体投放至河道上后,通过控制模块控制动力模块带动船体在河道上行进过程中,通过两组浮体之间的拦截网箱对河道表面的漂浮物进行拦截收集,后续再通过控制模块控制动力模块带动船体返回河道岸边,便可实现对河道表面漂浮物的清理,有利于提升河道表面漂浮物清理的效率。
34、 2.通过两组导流板远离支撑架的一端伸出船体船头端并朝向相互远离的方向延伸以形成扩口状,后续船体在河道内行进过程中,可通过两组导流板对河道上的漂浮物进行拦截并导流至两组浮体之间的拦截网箱,便于拦截网箱更好地拦截收集河道漂浮物。
35、 3.在船体投放至河道时,通过控制模块控制卷扬机驱使网孔板朝向远离拦截网箱的方向向下摆动直至网孔板活动端低于拦截网箱底部,船体行进过程中,部分无法正常进入拦截网箱的漂浮物堆积在网孔板上方,后续船体从河道返回岸边时,通过控制模块控制卷扬机驱使网孔板向上摆动至网孔板封堵拦截网箱开口侧,以将堆积在拦截网箱开口侧的漂浮物捞入至拦截网箱内的同时封堵拦截网箱开口侧,限制拦截网箱内的漂浮物通过拦截网箱开口侧飘出拦截网箱外。
本文地址:https://www.jishuxx.com/zhuanli/20240722/224545.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表