一种超机动水下高速航行器及其矢量推进装置
- 国知局
- 2024-08-01 06:49:02
本发明涉及了一种水下高速航行器,涉及水下智能装备领域,具体涉及一种超机动水下高速航行器及其矢量推进装置。
背景技术:
1、随着海洋探索的不断深入,世界各国针对自主式水下航行器auv的研发力度逐年增大。为更加高效地完成复杂工况下的目标任务与更加及时地实现危险规避,高机动性已成为目前auv装备的主要发展方向之一。研制出具备更高机动性能的auv装备,可大幅提升深远海综合探测能力。
2、目前的auv装备分为两类:非回转体式与回转体式。非回转体式auv装备通常安装有多个推进器,主体部分具有非轴对称外型,可实现低航速下的矢量机动,但水阻较大,无法实现高航速运行。发明专利cn114852300a中公开了一种矢量推进的水下航行器,其主体呈“十”字型,采用4个推进喷头实现矢量机动,可在不改变位置和姿态的前提下进行方向调整,但航速较低。回转体式auv装备的主体部分具备轴对称外型,可有效降低水阻与能耗,其又可分为单推进器式与多推进器式。多推进器式回转体auv装备通常在主体四周布置多个推进器,通过不同推进器的协同工作实现矢量机动。发明专利cn109677575b中公开了一种具有可旋转结构的水下auv,其回转体外型可有效起到抗流减阻的作用,但多个推进器的布置增大了高航速下的水阻与能耗,限制了航行的最大速度。单推进器式回转体auv装备只有一个推进器,具备减阻外型的同时,可实现高航速运行。然而传统的单推进器式回转体auv装备主要采用舵进行姿态的控制,无法实现低航速下的快速机动。
3、为解决上述问题,新型的单推进器式回转体auv装备将矢量推进技术融入其设计。然而,现有设计方案只涉及了推进器推力方向的控制,因装备内部浮心与重心改变所造成的高速失稳现象并未得到解决。例如发明专利cn116605388a提出一种水下矢量推进器,通过齿轮传动对推进器的推力方向进行调节,进而实现装备的矢量机动,但在推进器转向过程中,装备的浮心与重心位置发生改变,在没有额外控制力的干预下,无法实现高速航行下的稳定转向。
技术实现思路
1、为了解决背景技术中存在的问题,本发明所提供一种超机动水下高速航行器及其矢量推进装置。本发明解决现有技术方案航行速度慢、机动性能差、在高航速下矢量机动时失稳的问题,在保障装备高航速运行的同时,亦能稳定地完成矢量机动,克服因内部重心与浮心改变所带来的附加力矩的作用,大幅提升auv装备的机动性。
2、本发明采用的技术方案是:
3、一、一种超机动水下高速航行器的矢量推进装置:
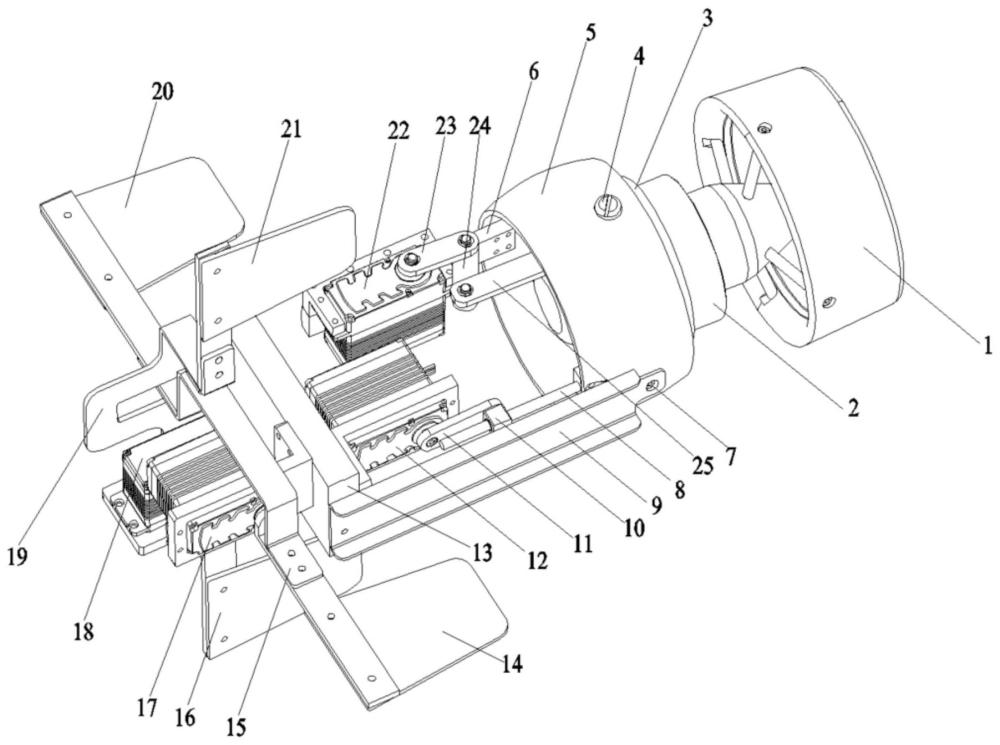
4、矢量推进装置包括支撑结构、导管推进器、电机套、水平矢量调节机构、垂直矢量调节机构、水平辅助控制机构和垂直辅助控制机构,垂直矢量调节机构、水平辅助控制机构和垂直辅助控制机构均安装在支撑结构上并通过支撑结构安装在超机动水下高速航行器的机壳的尾部内,垂直矢量调节机构位于支撑结构上靠近超机动水下高速航行器尾部的一侧,水平辅助控制机构和垂直辅助控制机构位于支撑结构上远离超机动水下高速航行器尾部的一侧且互不干涉,导管推进器通过电机套安装在水平矢量调节机构上且位于机壳的尾部外侧,水平矢量调节机构安装在垂直矢量调节机构上。
5、水平矢量调节机构安装在垂直矢量调节机构末端,带动电机套和导管推进器实现水平摆动;垂直矢量调节机构安装在支撑结构上,带动水平矢量调节机构、电机套和导管推进器实现俯仰摆动。水平辅助控制机构用于实现装备在垂直方向上的辅助控制;垂直辅助控制机构用于实现装备在水平方向上的辅助控制。
6、所述的支撑结构包括支撑架和支撑板,支撑板竖直安装在超机动水下高速航行器的机壳尾部内壁上并垂直于超机动水下高速航行器的前进方向,支撑架包括两个支撑连接板,两个支撑连接板的一端安装在支撑板的左右对称两侧,两个支撑连接板竖直布置且长度方向垂直于支撑板;垂直矢量调节机构位于两个支撑连接板之间,垂直矢量调节机构包括垂直摆动架、滑杆、滑块、垂直连杆和垂直控制舵机,垂直摆动架为空心圆柱状,垂直摆动架的外侧周面为弧状并朝向自身的中心弯曲,垂直摆动架的中心轴线平行于超机动水下高速航行器的前进方向,垂直摆动架和支撑板之间相间隔并分别位于靠近和远离导管推进器的一侧,支撑架的两个支撑连接板的另一端通过水平销轴左右对称铰接在垂直摆动架的外侧面中部;垂直控制舵机的机身通过第一舵机安装架安装在支撑板上靠近垂直摆动架的一侧板面,垂直控制舵机靠近其中一侧的第一支撑连接板,垂直控制舵机的输出轴朝向并垂直于第一支撑连接板,垂直控制舵机的输出轴通过花键和垂直连杆的一端同步连接,垂直连杆的另一端铰接在滑块上远离第一支撑连接板的侧面,滑块滑动套装在滑杆上并靠近滑杆的一端,滑杆的另一端连接垂直摆动架的内侧面上靠近自身的一侧边缘,滑杆的另一端位于垂直摆动架的的水平轴面上,滑杆和垂直连杆的长度方向均平行于支撑连接板;水平矢量调节机构铰接在垂直摆动架的内侧面中部。
7、垂直连杆在垂直控制舵机的驱动下往复摆动,通过滑块与滑杆的传动,带动垂直摆动架绕水平销轴的轴线实现俯仰摆动。
8、所述的水平矢量调节机构包括水平摆动架、水平舵机连接架、水平控制舵机、水平一级连杆、水平二级连杆和水平三级连杆,水平矢量调节机构位于支撑架的两个支撑连接板之间,水平摆动架为空心圆柱状,水平摆动架的外侧周面为弧状并朝向自身的中心弯曲,水平摆动架的中心轴线平行于垂直摆动架的中心轴线,,水平摆动架上还开设有若干对称的镂空结构以减轻重量;垂直摆动架套装在水平摆动架上,水平摆动架的上下两侧分别通过垂直销轴与垂直摆动架的上下两侧相铰接;水平控制舵机的机身通过水平舵机连接架安装在垂直摆动架上且位于垂直摆动架和支撑板之间,水平控制舵机的输出轴竖直向上并通过花键同步连接水平一级连杆的一端,水平一级连杆的另一端铰接水平二级连杆的一端,水平二级连杆的另一端铰接水平三级连杆的一端,水平三级连杆的另一端连接至靠近自身的水平摆动架一侧端面的上侧;水平摆动架的另一侧端面连接电机套,电机套套装在导管推进器的电机的机身上,导管推进器的电机的输出轴平行于水平摆动架的中心轴线。
9、水平摆动架经过水平一级连杆、水平二级连杆与水平三级连杆的组合传动,在水平控制舵机的驱动下绕垂直销轴的轴线实现往复摆动,同时又在垂直矢量调节机构的带动下实现俯仰运动。
10、导管推进器和电机套焊接在一起,在垂直摆动架的带动下,可绕水平销轴的轴线实现俯仰摆动,同时,又可以在水平摆动架的带动下,绕垂直销轴的轴线实现往复摆动,继而实现了推进方向的矢量调节。
11、所述的水平辅助控制机构包括第一水平舵板、水平舵架、水平舵板控制舵机和第二水平舵板,水平舵架为几字形架构且两侧水平布置,第一水平舵板和第二水平舵板水平对称布置在水平舵架的两端,第一水平舵板和第二水平舵板的板面均垂直于支撑板;水平舵板控制舵机的机身通过第二舵机安装架安装在支撑板上远离垂直摆动架的一侧面并靠近第一支撑连接板,水平舵板控制舵机的输出轴水平朝向并垂直于第一支撑连接板所在的竖直面,水平舵板控制舵机的输出轴通过花键同步连接水平舵架上竖直的架体上,第一水平舵板和第二水平舵板位于机壳的外侧。
12、水平舵架在水平舵板控制舵机的驱动下转动,可绕水平舵板控制舵机输出轴的轴线转动,并带动水平左舵板及水平右舵板转动,实现装备在垂直方向上辅助控制,进而实现对装备运动姿态的辅助控制。
13、所述的垂直辅助控制机构包括垂直下舵板、垂直舵板控制舵机、垂直舵架和垂直上舵板,垂直舵架为几字形架构且两侧竖直布置,垂直上舵板和垂直下舵板分别竖直安装在垂直舵架的上下两端,垂直上舵板和垂直下舵板的板面均垂直于支撑板;垂直舵板控制舵机的机身通过第三舵机安装架安装在支撑板上远离垂直摆动架的一侧面并靠近第二支撑连接板,垂直舵板控制舵机的输出轴竖直向下并通过花键同步连接在垂直舵架上水平的架体上;垂直上舵板和垂直下舵板位于机壳的外侧。
14、垂直舵架在垂直舵板控制舵机的驱动下转动,可绕垂直舵板控制舵机输出轴的轴线转动,并带动垂直上舵板及垂直下舵板转动,实现装备在水平方向上辅助控制,进而实现对装备运动姿态的辅助控制。
15、二、一种超机动水下高速航行器:所述的超机动水下高速航行器的尾部安装有上述矢量推进装置。
16、本发明的有益效果是:
17、本发明基于两串联传动链对推进器的推力方向进行矢量控制,并通过4个辅助舵的协同作用,弥补因重心与浮心改变所带来的附加力矩,提升了auv装备在高航速下矢量机动时的稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225190.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表