一种基于传感器状态识别的高空作业车幅度控制方法及系统与流程
- 国知局
- 2024-08-01 04:59:57
本发明涉及高空作业车,尤其是涉及一种基于传感器状态识别的高空作业车幅度控制方法及系统。
背景技术:
1、高空作业车作为运送工作人员和使用器材到现场并进行空中作业的专用车辆,其主要由支腿机构、举升机构、回转机构和作业平台等部件组成,适用于园林维护、通信维修、油田检修等场景。高空作业平台的臂架可通过转台回转调节作业角度,当臂架位于车尾附近区间时作业能力最强。高空作业车辆臂架在不同转台回转角度及不同变幅角度时对应不同的最大允许伸长量,即为车辆的安全作业范围。车辆在高空作业时,控制系统必须将臂架幅度限制在预先设定的安全作业范围之内,以防止车辆发生倾翻或结构失效的危险。其中幅度指的是车辆回转中心距离工作平台最外缘的水平距离,安全作业幅度一般由臂架变幅角度、伸缩长度以及转台回转角度确定。
2、对于高空作业平台安全工作范围,现多基于传感器计算当前作业幅度,再比较当前臂架的作业幅度是否小于对应固定幅度控制方法,即主臂长度传感器、主臂倾角传感器及回转编码器均正常工作时才允许作业,且在主臂长度传感器、主臂倾角传感器及回转编码器等传感器掉线或通讯异常时直接禁止作业。
3、现有固定作业幅度车辆的控制方法较为简单,仅需在控制器中预先输入变幅平面内的作业曲线,车辆作业时根据实时检测的转台回转角度和变幅角度,控制臂架伸长量不超过此角度对应的允许最大伸长量即可,在长度传感器、倾角传感器、回转编码器任一电气元件出现问题时一律禁止高空作业车工作。
4、在作业过程中,如果因为电气元件的小故障导致整个系统停机,将严重影响工作效率。若果能提高容忍部分故障的能力,可以减少非必要的停机时间,保证作业的连续性。原有幅度控制方法必然导致车辆控制幅度过于保守,传感器偶发故障会导致整个系统直接停机,将严重影响工作效率。在高空作业中,安全性是至关重要的,容忍部分电气元件的故障可以确保在某些元件失效时,车辆仍然能够保持稳定的运行状态,从而保护操作人员的安全。现有方式在传感器故障时一刀切的禁止工作,会使得整车作业能力不能得到充分利用。为了在保证施工人员的安全的前提下,提高幅度控制的故障容忍度,进而提高设备安全作业能力,需要对原有幅度控制方法进行改良。
5、公开号为cn117069022a的专利申请公开了一种高空作业车辆变幅度安全作业范围控制方法及装置,依据支腿扩桥幅度及臂架变幅角度传感器、车架倾斜角度传感器、当前臂架伸出长度的长度传感器的当前值进行允许的幅度值的计算,未考虑部分传感器故障情况下的安全作业场景,对传感器故障零容忍。
技术实现思路
1、发明目的:为了克服背景技术的不足,本发明第一目的是请求公开一种基于传感器状态识别的高空作业车幅度控制方法,实现高空作业车在部分传感器掉线或者通讯异常时,将产生故障的传感器所测量的值设置为最危险工况的对应值,若仍能保证安全幅度状态则可以正常使用;
2、第二目的是公开包含上述基于传感器状态识别的高空作业车幅度控制方法的控制系统。
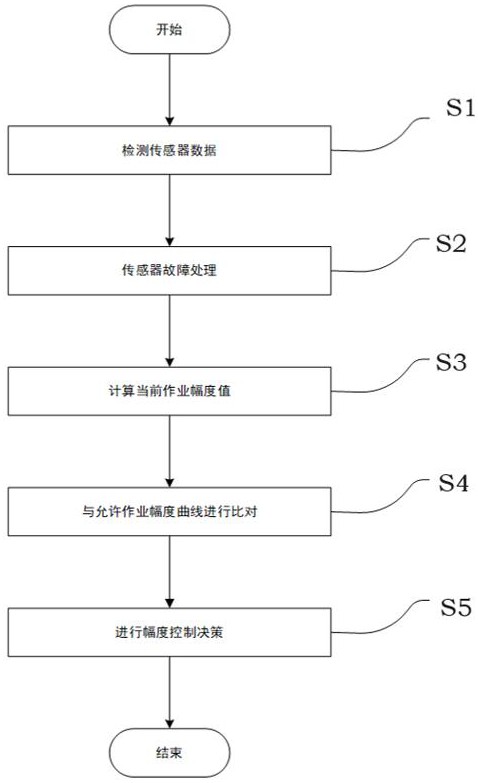
3、技术方案:本发明所公开的基于传感器状态识别的高空作业车幅度控制方法,包括以下步骤:
4、s1、在高空作业车工作时,通过主臂长度传感器、主臂倾角传感器及转台回转编码器检测臂架长度、主臂倾角以及转台回转角度;
5、s2、依次判定主臂长度传感器、主臂倾角传感器、转台回转编码器是否正常通讯,
6、若三者都可以正常通讯,直接进行下一步操作;
7、若任一传感器掉线,将掉线传感器设置为幅度控制曲线中最危险工况下对应值;
8、s3、计算当前作业幅度值;
9、s4、将当前作业幅度值与允许的幅度曲线进行对比;
10、s5、根据是否满足幅度控制要求进行高空作业车工作,即进行变幅、伸臂、回转的减速或停止控制。
11、进一步的,s1中主臂长度传感器和主臂倾角传感器替换为同时检测主臂的长度与倾角的长角传感器,通过长角传感器的监测数据来确定当前作业幅度值。
12、进一步的,s2中包括:
13、s2-1、处理主臂长度传感器故障:
14、判断主臂长度传感器是否故障,若故障则设置主臂伸出长度=最大极限值lmax,lmax指主臂伸出到最大极限位置时对应的主臂伸出长度值,否则读取当前值;
15、s2-2、处理主臂角度传感器故障:
16、判断主臂角度传感器是否故障,若故障则设置主臂倾斜角度=0°,否则读取当前值;
17、s2-3、处理转台回转编码器故障:
18、判断转台回转编码器是否故障,若故障则设置回转角度为最小作业幅度对应的回转角度值,否则读取当前值。
19、进一步的,s3根据输入主臂伸出长度和主臂倾斜角度计算当前作业幅度值。
20、进一步的,s4根据输入转台回转角度值,找到对应允许作业幅度曲线,将允许作业幅度与当前作业幅度值进行对比。
21、一种控制系统,包含上述基于传感器状态识别的高空作业车幅度控制方法。
22、有益效果:与现有技术相比,本发明的优点为:
23、(1)高可靠性:高空作业车在工作时,可能会遇到各种复杂的电气环境。能够容忍部分电气元件的故障,意味着即使某些元件出现问题,车辆也能继续运行或至少保持安全状态,从而大大提高了整车的可靠性。
24、(2)减少停机时间:在作业过程中,如果因为电气元件的小故障导致整个系统停机,将严重影响工作效率。容忍部分故障的能力可以减少非必要的停机时间,保证作业的连续性。
25、(3)降低维护成本:电气元件的故障是不可避免的,但如果高空作业车能够容忍这些故障,那么维护人员就有更多的时间和空间来进行故障排查和修复,而不必立即停机处理。这样可以减少紧急维修的频率和成本。
26、(4)增强安全性:在高空作业中,安全性是至关重要的。容忍部分电气元件的故障可以确保在某些元件失效时,车辆仍然能够保持稳定的运行状态,从而保护操作人员的安全。
27、(5)提高作业效率:由于减少了因电气元件故障导致的停机时间,高空作业车可以更加高效地完成作业任务。这对于需要连续作业或时间紧迫的工程项目来说尤为重要。
28、综上,高空作业车在幅度控制的过程中能够容忍传感器部分电气元件的故障,为其带来了高可靠性、减少停机时间、降低维护成本、增强安全性和提高作业效率等诸多优势,这些优势使得高空作业车在各种高空作业场景中都能发挥出色的性能。
技术特征:1.一种基于传感器状态识别的高空作业车幅度控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于传感器状态识别的高空作业车幅度控制方法,其特征在于,s1中主臂长度传感器和主臂倾角传感器替换为同时检测主臂的长度与倾角的长角传感器,通过长角传感器的监测数据来确定当前作业幅度值。
3.根据权利要求1所述的基于传感器状态识别的高空作业车幅度控制方法,其特征在于,s2中包括:
4.根据权利要求1所述的基于传感器状态识别的高空作业车幅度控制方法,其特征在于,s3根据输入主臂伸出长度和主臂倾斜角度计算当前作业幅度值。
5.根据权利要求1所述的基于传感器状态识别的高空作业车幅度控制方法,其特征在于,s4根据输入转台回转角度值,找到对应允许作业幅度曲线,将允许作业幅度与当前作业幅度值进行对比。
6.一种包含权利要求1中所述基于传感器状态识别的高空作业车幅度控制方法的控制系统。
技术总结本发明公开了一种基于传感器状态识别的高空作业车幅度控制方法,包括以下步骤:在高空作业车工作时,通过主臂长度传感器、主臂倾角传感器及转台回转编码器检测臂架长度、主臂倾角以及转台回转角度;依次判定主臂长度传感器、主臂倾角传感器、转台回转编码器是否正常通讯,若任一传感器掉线,将掉线传感器设置为幅度控制曲线中最危险工况下对应值;计算当前作业幅度值;将当前作业幅度值与允许的幅度曲线进行对比;根据是否满足幅度控制要求进行高空作业车工作。本发明控制过程中能够容忍传感器部分电气元件的故障,为其带来了高可靠性、减少停机时间、降低维护成本、增强安全性和提高作业效率等诸多优势。技术研发人员:赵瑞雪,商晓恒,满军,任路遥,许威受保护的技术使用者:徐州徐工随车起重机有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240723/217792.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表