一种管道清淤机器人
- 国知局
- 2024-07-29 13:08:36
本技术涉及清洁设备,特别涉及一种管道清淤机器人。
背景技术:
1、管道是用管子、管子联接件和阀门等联接成的用于输送气体、液体或带固体颗粒的流体的装置,在生活中应用非常广泛,主要用在给水、排水、供热、供煤气、长距离输送石油和天然气、农业灌溉、水力工程和各种工业装置中。由于管道的规模庞大和复杂性,管道的老化、损坏、堵塞等问题需要及时发现和修复,而管道的巡检和维护也需要耗费一定的人力和物力。
2、现有的管道维护机器人通常只执行管道的单一任务,如检测或清洁,且清洁工作的进行通常在管道堵塞等问题已经发生后进行。这种方式存在如下缺陷:
3、1.无法满足特定管段清洁,管道机器人在进入管道后会一直执行清洁工作,对没有沉积物的管段也会执行清洁任务;
4、2.清洁具有滞后性,无法进行预防性维护,在管道问题发生后才执行清洁任务,无法应对突发的管道问题造成的损失。
5、可见,现在的管道机器人存在着无法满足特定管段清洁且无法进行预防性维护的问题。
6、因此,鉴于上述方案于实际制作及实施使用上的缺失之处,而加以修正、改良,同时本着求好的精神及理念,并由专业的知识、经验的辅助,以及在多方巧思、试验后,方创设出本实用新型,特再提供一种管道清淤机器人,用于解决现在的管道机器人无法满足特定管段清洁且无法进行预防性维护的问题。
技术实现思路
1、本实用新型的目的在于提供一种管道清淤机器人,用于解决现在的管道机器人无法满足特定管段清洁且无法进行预防性维护的问题。
2、本实用新型的技术方案是这样实现的:
3、一种管道清淤机器人,包括机体,所述机体上设置有照明系统、调节机构、旋刷机构与驱动组件;
4、所述照明系统上设有多条照明带,多条照明带固定连接于机体前端的信息采集单元,所述信息采集单元上固定有摄像头,所述摄像头设置于信息采集单元的中心;
5、所述驱动组件设置有多个,多个驱动组件均匀分布于六边形机体的三个面上;三组驱动组件都在轮架中内置有电机;
6、所述调节机构设置有多组,各调节机构分别与驱动组件、丝杆装置、机体相连接,用以适应管径大小;
7、旋刷机构,所述旋刷机构配备螺旋盘刷。
8、作为一种优选的实施方式,所述机体包括控制舱、三足支架、信息采集单元,所述控制舱与三足支架相固定连接,所述三足支架与信息采集单元固定连接。
9、作为一种优选的实施方式,每组调节机构包括前撑杆、中撑杆和后撑杆,所述前撑杆一端通过螺纹与丝杆装置相连接,所述前撑杆另一端通过螺纹与驱动组件相连接,所述中撑杆一端通过螺纹与控制舱相连接,所述中撑杆另一端通过螺纹与轮架相连接,所述后撑杆一端通过螺纹与控制舱相连接,所述后撑杆另一端通过螺纹与轮架相连接。
10、作为一种优选的实施方式,所述旋刷机构包括螺旋盘刷、刷头、盘刷通孔、法兰联轴器、圆形紧固件、刷头通孔和刷毛插槽,所述刷头通过刷头通孔固定连接于螺旋盘刷的盘刷通孔,所述圆形紧固件固定于螺旋盘刷上,所述法兰联轴器通过螺丝固定连接于圆形紧固件。
11、作为一种优选的实施方式,所述驱动组件包括轮架、驱动轮、第二电机和第三电机,每组的四个驱动轮固定连接于第二电机和第三电机的输出轴,所述第二电机与所述第三电机均内置于轮架中。
12、作为一种优选的实施方式,所述控制舱包括按钮接口、led指示灯、散热孔、第一电机、侧舱门、前部舱门和第一螺杆轴承座孔,所述按钮接口设置于控制舱上部侧面,所述led指示灯设置于按钮接口的邻近位置,所述散热孔阵列设于控制舱的底部侧面,所述前部舱门通过铰链连接到门框,所述侧舱门通过铰链连接到门框,所述第一电机固定于控制舱后部。
13、作为一种优选的实施方式,所述信息采集单元包括照明带、摄像头、mic接口、指示灯、固定螺孔和第二螺杆轴承座孔,所述摄像头设置于信息采集单元的中心,所述mic接口设置于摄像头右下角,所述指示灯设置于摄像头左下角,所述固定螺孔呈四角分布于信息采集单元表面,用于稳固地固定摄像头,所述照明带分布于信息采集单元的各个面上。所述第二螺杆轴承座孔设置于信息采集单元背部。
14、作为一种优选的实施方式,所述丝杆装置包括丝杆滑块、丝杆、滑块和滑块螺孔,所述丝杆滑块套设于丝杆的圆周表面,所述丝杆滑块通过滑块螺孔固定于滑块内,所述丝杆固定连接于第一螺杆轴承座孔,所述丝杆延伸至信息采集单元背部的第二螺杆轴承座孔。
15、所述刷头可通过调节刷头通孔与盘刷通孔的连接位置,从而适应不同管径大小。
16、作为一种优选的实施方式,所述丝杆固定连接于旋转电机,所述旋转电机的壳体固定在所述控制舱的内部,可通过控制丝杆滑块的伸缩进而控制适应管径大小。
17、本实用新型提供的技术方案与现有技术相比具有以下优点:
18、本实用新型提供的管道清淤机器人,通过驱动组件能够支撑于管道内并独立沿管道行走,位于机体前端的信息采集单元可实时采集管道信息,对于管道内的缺陷可采集上报,后端的旋刷机构能够刮刷可清理沉积物,从而在后续清洗时能将沉积物冲走,完成清淤。采用本装置对管道进行清淤,相对于现有的管道清淤机器人而言,具有以下优点:其一,可选择性的对特定管段执行清淤任务,避免对整个管道系统不必要的清理,提高工作效率;其二,对于其他管道缺陷可及时发现,以便后续采取其他操作,采取预防性维护可延长管道使用寿命。
19、本实用新型提供的管道清淤机器人,设有多套驱动组件,驱动组件与调节机构组合工作,允许设备在不同管径的管道中工作,降低设备采购和维护的成本,节省资源,灵活性强。
20、总结而言,本实用新型能够对管道的指定位置进行清洁工作,具有很好的灵活性,并且对于其他管道缺陷可及时发现,达到预防维护的效果,很好地解决了现在的管道机器人无法满足特定管段清洁且无法进行预防性维护的问题。
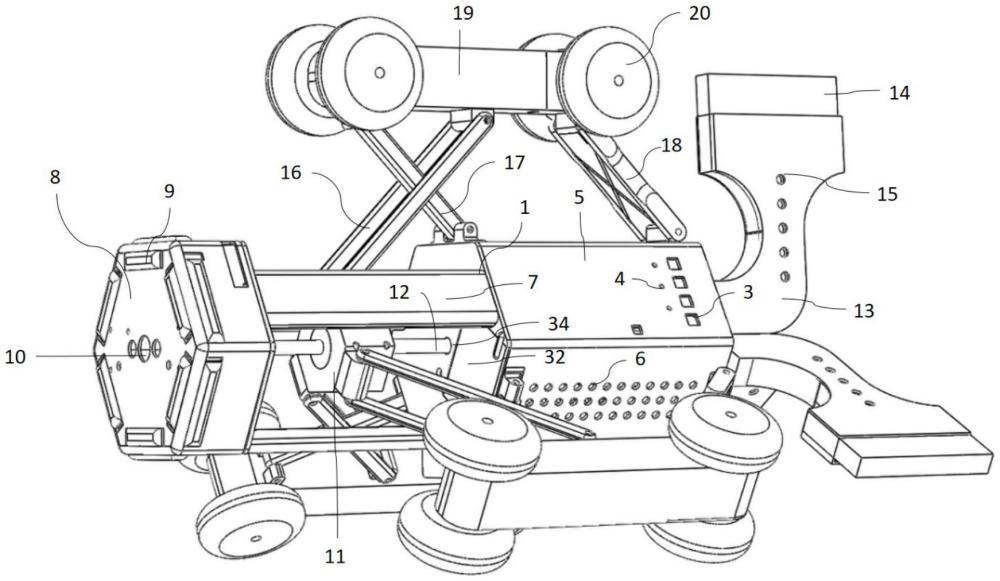
技术特征:1.一种管道清淤机器人,其特征在于,包括机体(1),所述机体上设置有照明系统、调节机构、旋刷机构与驱动组件;
2.根据权利要求1所述的一种管道清淤机器人,其特征在于,所述机体(1)包括控制舱(5)、三足支架(7)和信息采集单元(8),所述控制舱(5)与三足支架(7)相固定连接,所述三足支架(7)与信息采集单元(8)固定连接。
3.根据权利要求1所述的一种管道清淤机器人,其特征在于,每组调节机构包括前撑杆(16)、中撑杆(17)和后撑杆(18),所述前撑杆(16)一端通过螺纹与丝杆装置相连接,所述前撑杆(16)另一端通过螺纹与驱动组件相连接,所述中撑杆(17)一端通过螺纹与控制舱(5)相连接,所述中撑杆(17)另一端通过螺纹与轮架(19)相连接,所述后撑杆(18)一端通过螺纹与控制舱(5)相连接,所述后撑杆(18)另一端通过螺纹与轮架(19)相连接。
4.根据权利要求1所述的一种管道清淤机器人,其特征在于,所述旋刷机构包括螺旋盘刷(13)、刷头(14)、盘刷通孔(15)、法兰联轴器(21)、圆形紧固件(24)、刷头通孔(25)和刷毛插槽(26),所述刷头(14)通过刷头通孔(25)固定连接于螺旋盘刷(13)的盘刷通孔(15),所述圆形紧固件(24)固定于螺旋盘刷(13)上,所述法兰联轴器(21)通过螺丝固定连接于圆形紧固件(24)。
5.根据权利要求1所述的一种管道清淤机器人,其特征在于,所述驱动组件包括轮架(19)、驱动轮(20)、第二电机(29)和第三电机(30),每组的四个驱动轮(20)固定连接于第二电机(29)和第三电机(30)的输出轴,所述第二电机(29)与所述第三电机均内置于轮架(19)中。
6.根据权利要求2所述的一种管道清淤机器人,其特征在于,所述控制舱(5)包括按钮接口(3)、led指示灯(4)、散热孔(6)、第一电机(22)、侧舱门(23)、前部舱门(32)和第一螺杆轴承座孔(34),所述按钮接口(3)设置于控制舱(5)上部侧面,所述led指示灯(4)设置于按钮接口(3)的邻近位置,所述散热孔(6)阵列设于控制舱(5)的底部侧面,所述前部舱门(32)通过铰链连接到门框,所述侧舱门(23)通过铰链连接到门框,所述第一电机(22)固定于控制舱(5)后部。
7.根据权利要求2所述的一种管道清淤机器人,其特征在于,所述信息采集单元(8)包括照明带(9)、摄像头(10)、mic接口(35)、指示灯(33)、固定螺孔(31)和第二螺杆轴承座孔(2),所述摄像头(10)设置于信息采集单元(8)的中心,所述mic接口(35)设置于摄像头(10)右下角,所述指示灯(33)设置于摄像头(10)左下角,所述固定螺孔(31)呈四角分布于信息采集单元(8)表面,用于稳固地固定摄像头(10),所述照明带(9)分布于信息采集单元(8)的各个面上,所述第二螺杆轴承座孔(2)设置于信息采集单元(8)背部。
8.根据权利要求3所述的一种管道清淤机器人,其特征在于,所述丝杆装置包括丝杆滑块(11)、丝杆(12)、滑块(27)和滑块螺孔(28),所述丝杆滑块(11)套设于丝杆(12)的圆周表面,所述丝杆滑块(11)通过滑块螺孔(28)固定于滑块(27)内,所述丝杆(12)固定连接于第一螺杆轴承座孔(34),所述丝杆(12)延伸至信息采集单元(8)背部的第二螺杆轴承座孔(2)。
9.根据权利要求8所述的一种管道清淤机器人,其特征在于,丝杆(12)固定连接于旋转电机,所述旋转电机的壳体固定在所述控制舱(5)的内部,能够通过控制丝杆滑块(11)的伸缩进而适应管径大小。
技术总结本技术公开了一种管道清淤机器人,涉及清洁设备技术领域,用于解决现在的管道机器人无法满足特定管段清洁且无法进行预防性维护的问题,一种管道清淤机器人,包括机体,所述机体上设置有照明系统、调节机构、旋刷机构与驱动组件;所述照明系统上设有多条照明带,多条照明带固定连接于机体前端的信息采集单元;多个驱动组件均匀分布于六边形机体的三个面上;各调节机构分别与驱动组件、丝杆装置、机体相连接;本技术能够对管道的指定位置进行清洁工作,具有很好的灵活性,并且对于其他管道缺陷可及时发现,达到预防维护的效果,很好地解决了现在的管道机器人无法满足特定管段清洁且无法进行预防性维护的问题。技术研发人员:许志乐,李静茹,闫吉顺,杨彦,朱家通,陈景帅受保护的技术使用者:青岛农业大学技术研发日:20231129技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240725/143130.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表