一种机器人的小臂壳体的制作方法
- 国知局
- 2024-08-05 12:36:51
本申请涉及机器人的,尤其是涉及一种机器人的小臂壳体。
背景技术:
1、随着科技的发展与人文的进步,机器人越来越普遍地运用在各行各业。其中,六轴机器人由于具有多个自由度而更受青睐。
2、公开号为cn212265876u的中国实用新型专利公开了一种打磨用六轴机器人,为减小手腕的体积,用于控制手腕活动的电机以及皮带传动组件均安装于小臂壳体上。其中,小臂壳体的内部中空设置供电机安装,且电机通过转接板与小臂壳体固定连接。
3、但是,小臂壳体上内部中空的设计将导致其在该位置的结构强度较差,而转接板虽能对小臂壳体上内部中空的位置起到一定的提高结构强度的效果,但是转接板与小臂壳体之间无法避免地会存在间隙,故此时小臂壳体上供电机安装的位置的结构强度仍较为薄弱。
技术实现思路
1、本申请提供一种机器人的小臂壳体,无需转接板,电机能够直接安装,且电机安装的位置具有更高的结构强度。
2、本申请提供一种机器人的小臂壳体,采用如下的技术方案:
3、一种机器人的小臂壳体,包括外壳以及两个供电机安装固定的连接板,所述外壳长度方向的一端具有用于供手腕安装的凹槽,所述外壳的内部于远离所述凹槽的一端具有供两个电机安装的安装空间;所述安装空间于所述外壳的两侧均形成开口,两所述连接板分别位于所述外壳的两开口处,所述连接板对所述外壳上的所述安装空间所在的位置起支撑作用,且所述连接板与所述外壳为一体化结构。
4、通过采用上述技术方案,无需转接板,电机通过连接板即可于安装空间中完成固定安装,能够使电机安装的过程更加方便;同时,连接板与外壳为一体化结构且能够对外壳上安装空间所在的位置起支撑作用,从而能够使电机安装的位置具有更高的结构强度。
5、可选的,两个所述电机于所述安装空间中沿所述外壳的长度方向分布。
6、通过采用上述技术方案,能够减小外壳垂直于其长度方向的横截面的面积,同时能够减小外壳中空程度大小,从而既能够减小小臂壳体的体积,也能够进一步提高小臂壳体的结构强度。
7、可选的,所述连接板的一侧于所述安装空间的开口处留有便于所述电机安装的安装口。
8、通过采用上述技术方案,安装口能够方便使用者将电机置入安装空间中后于对应的连接板上固定安装,从而能够进一步使电机安装的过程更加方便。
9、可选的,还包括若干第一加强筋,所述第一加强筋设置于所述外壳上所述安装空间靠近所述凹槽的位置。
10、通过采用上述技术方案,第一加强筋能够提高小臂壳体靠近手腕的位置的结构强度,从而能够提高小臂壳体整体的结构强度。
11、可选的,所述第一加强筋的延伸轨迹与所述外壳的长度方向平行。
12、通过采用上述技术方案,能够降低皮带传动组件使用过程中对外壳的损耗,同时能够降低皮带传动组件的皮带张紧作用力对外壳的影响,进一步提高外壳的结构强度。
13、可选的,还包括若干第二加强筋,所述第二加强筋设置于所述安装空间中,且所述第二加强筋的两端分别与两所述连接板连接。
14、通过采用上述技术方案,第二加强筋使两个连接板之间形成连接关系,提高两个连接板之间的相对位置稳定性,从而能够提高两个连接板的结构强度,进而能够提高连接板对外壳上安装空间所在的位置的支撑作用。
15、可选的,所述连接板上开设有插接口,所述插接口与所述电机输出端的结构相适配。
16、通过采用上述技术方案,能够进一步方便使用者安装电机,同时能够提高电机与连接板的连接效果,从而提高电机安装后的位置稳定性。
17、可选的,所述连接板上开设有卡接槽,所述卡接槽位于所述连接板靠近所述安装空间的一侧,所述卡接槽与所述插接口相通,且所述卡接槽与所述电机输出端的结构相适配。
18、通过采用上述技术方案,能够更进一步方便使用者安装电机,同时能够进一步提高电机与连接板的连接效果,从而进一步提高电机安装后的位置稳定性。
19、综上所述,本申请包括以下至少一种有益效果:
20、1.于小臂壳体上安装电机时,无需转接板即可直接安装,且小臂壳体于电机安装的位置具有更高的结构强度;
21、2.能够使电机安装的过程更加方便,同时能够提高电机安装后的位置稳定性;
22、3.能够提高小臂壳体整体的结构强度,降低小臂壳体在皮带传动组件使用的过程中的损耗。
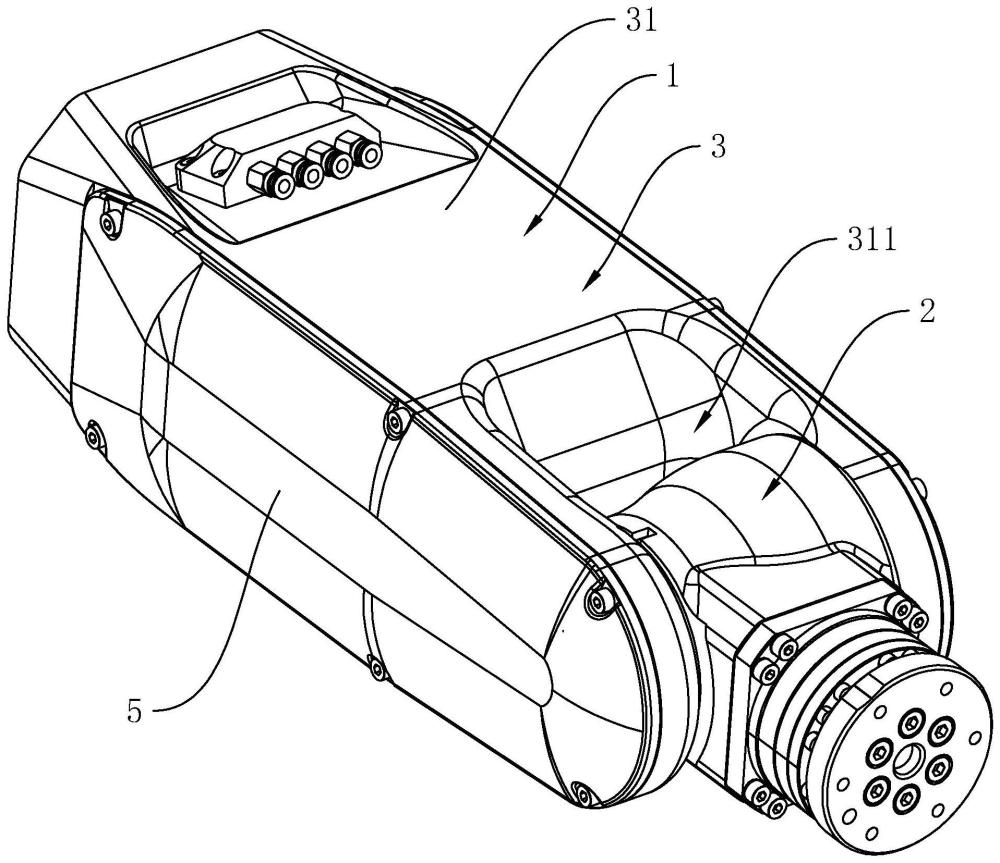
技术特征:1.一种机器人的小臂壳体,其特征在于,包括外壳(31)以及两个供电机(41)安装固定的连接板(32),所述外壳(31)长度方向的一端具有用于供手腕(2)安装的凹槽(311),所述外壳(31)的内部于远离所述凹槽(311)的一端具有供两个电机(41)安装的安装空间(312);所述安装空间(312)于所述外壳(31)的两侧均形成开口,两所述连接板(32)分别位于所述外壳(31)的两开口处,所述连接板(32)对所述外壳(31)上的所述安装空间(312)所在的位置起支撑作用,且所述连接板(32)与所述外壳(31)为一体化结构。
2.根据权利要求1所述的一种机器人的小臂壳体,其特征在于,两个所述电机(41)于所述安装空间(312)中沿所述外壳(31)的长度方向分布。
3.根据权利要求2所述的一种机器人的小臂壳体,其特征在于,所述连接板(32)的一侧于所述安装空间(312)的开口处留有便于所述电机(41)安装的安装口(313)。
4.根据权利要求2所述的一种机器人的小臂壳体,其特征在于,还包括若干第一加强筋(33),所述第一加强筋(33)设置于所述外壳(31)上所述安装空间(312)靠近所述凹槽(311)的位置。
5.根据权利要求4所述的一种机器人的小臂壳体,其特征在于,所述第一加强筋(33)的延伸轨迹与所述外壳(31)的长度方向平行。
6.根据权利要求1所述的一种机器人的小臂壳体,其特征在于,还包括若干第二加强筋(34),所述第二加强筋(34)设置于所述安装空间(312)中,且所述第二加强筋(34)的两端分别与两所述连接板(32)连接。
7.根据权利要求1所述的一种机器人的小臂壳体,其特征在于,所述连接板(32)上开设有插接口(321),所述插接口(321)与所述电机(41)输出端的结构相适配。
8.根据权利要求7所述的一种机器人的小臂壳体,其特征在于,所述连接板(32)上开设有卡接槽(322),所述卡接槽(322)位于所述连接板(32)靠近所述安装空间(312)的一侧,所述卡接槽(322)与所述插接口(321)相通,且所述卡接槽(322)与所述电机(41)输出端的结构相适配。
技术总结本申请公开了一种机器人的小臂壳体,涉及机器人的技术领域,包括外壳以及两个供电机安装固定的连接板,所述外壳长度方向的一端具有用于供手腕安装的凹槽,所述外壳的内部于远离所述凹槽的一端具有供两个电机安装的安装空间;所述安装空间于所述外壳的两侧均形成开口,两所述连接板分别位于所述外壳的两开口处,所述连接板对所述外壳上的所述安装空间所在的位置起支撑作用,且所述连接板与所述外壳为一体化结构。本申请无需转接板,电机能够直接安装,且电机安装的位置具有更高的结构强度。技术研发人员:鄢志明,郑皓轩,蔡跃霖,刘荣耀,岑圣伟,施幸昊受保护的技术使用者:宁波中大力德智能传动股份有限公司技术研发日:20231130技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240725/263543.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种门窗破窗器的制作方法
下一篇
返回列表