一种自提升式多循环智能锚杆钻机的制作方法
- 国知局
- 2024-07-27 10:32:48
本发明属于锚杆支护的,具体公开了一种自提升式多循环智能锚杆钻机。
背景技术:
1、锚杆支护是一种快速、安全、经济的巷道和隧道支护方式,是目前巷道和隧道支护先进技术的代表,是煤矿巷道和地面隧道支护技术的发展方向。在澳大利亚、英国、美国、南非等世界主要产煤国,锚杆支护技术已经得到广泛应用。目前,我国煤矿数量8000处左右,每年巷道掘进量超过8000km,其中综合机械化掘进量(综掘)占比90%以上。大中型煤矿巷道的锚杆支护率达到60%,有些矿区已经超过90%。经过实践证明,锚杆支护方式较比传统棚式支护相比,具有显著的技术、经济优越性,因其显著的围岩强度强化特性,加之支护成本较低,有效地改善了作业环境和安全生产条件,很大程度上提高了煤矿的经济效益,因而成为国内乃至世界矿井巷道的一种主要支护方式。
2、我国煤矿从1956年开始使用锚杆支护技术,发展迅速,1998年锚杆巷道支护比重已高达60.85%,1995年原煤炭工业部将“煤巷锚杆支护”列为煤炭工业“九五”重点科技攻关项目,到目前锚杆支护技术已基本覆盖所有巷道支护领域,且技术相对较为成熟,并且根据不同巷道地质条件,逐步演化出不同支护新工艺的锚杆支护方式。
3、锚杆支护属“主动支护”,作用原理时对围岩提供支护阻力,且随着围岩变形,支护阻力呈增大趋势,因而能够及时、有效地提高巷道的围岩强度、防止巷道围岩发生早期离层片帮和控制围岩形变。但现阶段井下巷道和地面隧道施工的支护自动化作业水平仍然较低,多采用机载普通锚杆钻机或人工手持式单体钻机,进行巷道和隧道的支护,存在着支护时间长、作业人员数量多、劳动强度大、支护效率低、职业病危害严重和操作人员工作时间内需处于空顶区等多方面隐患与危险,从而导致采掘失衡严重,支护时间长,严重影响掘进工程进度和采煤效率。
技术实现思路
1、本发明提供了一种自提升式多循环智能锚杆钻机,可搭载于各类设备(如锚护机器人、掘锚机、掘进机、运锚机、盾构等设备),对巷道和隧道进行锚杆全自动支护,提升巷道和隧道的支护效率,降低工人劳动强度。
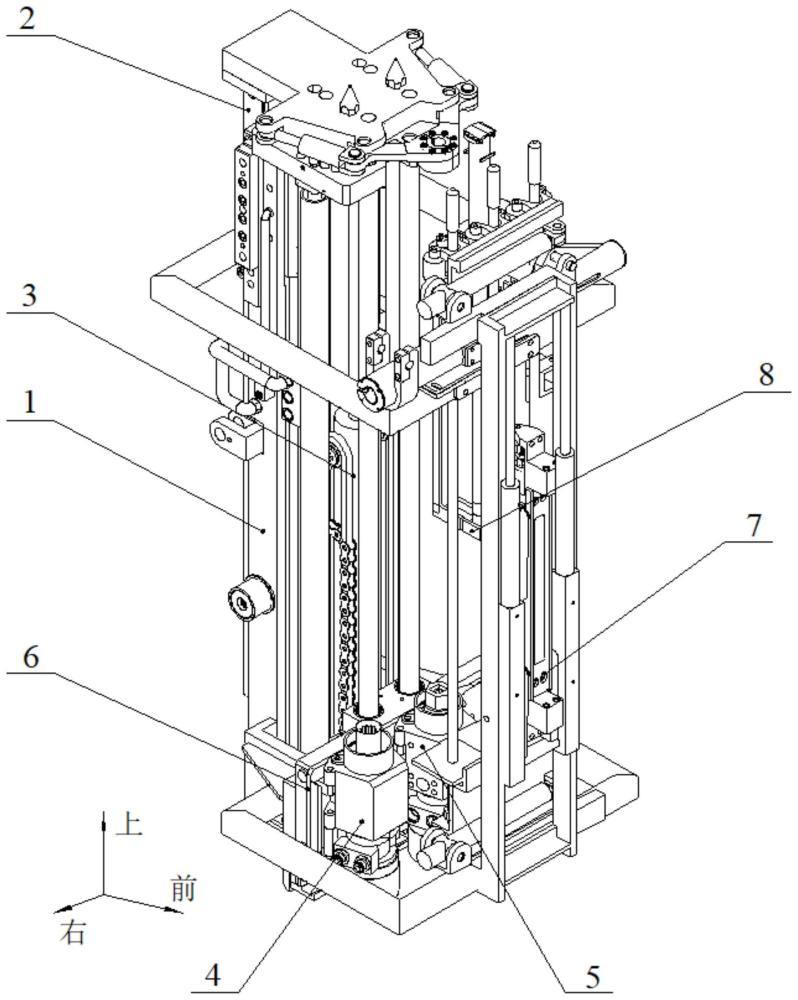
2、上述自提升式多循环智能锚杆钻机,包括机架、提升机构、进给机构、钻孔机构、锚固机构、钻锚箱切换机构、锚杆输送机构和药卷输送机构;机架包括支撑底板以及与支撑底板垂直相接的支撑立板;提升机构包括一级提升组件和二级提升组件;一级提升组件包括一级提升架和一级驱动件;一级提升架包括一级顶板以及与一级顶板垂直相接的一级立板;一级立板与支撑立板滑动相接,一级顶板位于支撑底板的上方;一级提升架由一级驱动件驱动升降;二级提升组件包括二级提升架和二级驱动件;二级提升架位于一级顶板和支撑底板之间,包括二级顶板、二级底板以及连接二级顶板和二级底板的限位杆;限位杆垂直于支撑底板;二级驱动件驱动二级提升架升降;进给机构包括进给驱动件、上导向轮、下导向轮、连接悬挂和进给座;进给驱动件包括固定杆以及与固定杆滑动连接的滑动筒,固定杆平行于限位杆,固定杆固定在二级提升架内,两个上导向轮对称安装在滑动筒的两侧,两个下导向轮对称安装在滑动筒的两侧,同侧的上导向轮和下导向轮通过连接悬挂连接;进给座固定在两条连接悬挂上,设置有限位孔,限位杆穿过限位孔;钻孔机构包括钻箱和钻杆;锚固机构包括锚箱和锚杆;钻锚箱切换机构包括钻锚箱切换导向板、钻箱切换移动件、锚箱切换移动件和钻锚箱切换驱动件;多块钻锚箱切换导向板并排设置,均与进给座连接,与支撑立板平行;钻箱切换移动件和锚箱切换移动件分别与钻锚箱切换导向板滑动相接,分别与钻箱和锚箱固定相接;钻锚箱切换驱动件驱动钻箱切换移动件和锚箱切换移动件沿钻锚箱切换导向板滑动;锚杆输送机构包括上护臂、下护臂、锚杆安装座、锚杆安装座驱动件、锚杆限位托辊、机械手和机械手安装架;上护臂的两端与一级提升架连接;下护臂的两端与机架连接;两组锚杆安装座分别滑动安装在上护臂和下护臂上,两组锚杆安装座所在平面与钻锚箱切换导向板平行且位于钻箱和锚箱的两侧;每组锚杆安装座上均安装有多组锚杆限位托辊,每组锚杆安装座由对应的锚杆安装座驱动件驱动沿护臂滑动,滑动方向与钻箱切换移动件和锚箱切换移动件的滑动方向相同;机械手安装架包括滑动相接的上滑架和下滑架,上滑架与上护臂连接,下滑架与下护臂连接;机械手安装在机械手安装架上,用于向锚杆安装座所在方向伸出并抓取由锚杆限位托辊夹持的锚杆;药卷输送机构包括对中架、对中架驱动件、导向管、导向槽、装药管架、夹紧槽、装药管架驱动件、装药管、提升块、提升块驱动件、药卷装填组件;对中架与上护臂滑动连接,由对中架驱动件驱动沿上护臂滑动,滑动方向与锚杆安装座的滑动方向相同;导向管安装在对中架上,与锚杆平行;导向槽设置在对中架上,与锚杆安装座垂直,位于导向管的下方,与导向管对应的位置设置有缺口;装药管架包括固定架和滑动架,固定架安装在对中架上,滑动架与固定架滑动连接,滑动架由装药管架驱动件驱动沿导向槽方向滑动;多个夹紧槽设置在滑动架上,沿导向槽方向布置,每个夹紧槽内均夹持有一根装药管,装药管的底端位于导向槽内;提升块由提升块驱动件驱动在导向槽的缺口和导向管之间移动,设置有送药孔ⅰ;药卷装填组件与提升块连接,用于将锚杆凝固药沿着装药管、导向管装入钻孔中。
3、上述自提升式多循环智能锚杆钻机中,一级提升组件还包括耐磨轨道;耐磨轨道安装在支撑立板上,与一级立板滑动相接;一级顶板的上表面设置有接顶锥;一级驱动件为一级提升油缸,底端通过销轴与机架耳座连接,顶端与一级顶板连接;二级提升组件还包括提升位移传感器;二级驱动件为二级提升油缸,底端与支撑底板连接,顶端与二级顶板连接;提升位移传感器与二级提升油缸平行,底端与支撑底板连接,用于测量二级提升架的位移。
4、上述自提升式多循环智能锚杆钻机中,进给机构还包括悬挂张紧组件;悬挂张紧组件与上导向轮或下导向轮配合,包括张紧套管、张紧叉杆、张紧弹簧、张紧螺母;张紧套管固定在进给驱动件的滑动筒上;张紧叉杆穿过张紧套管,顶端设置有轮座与上导向轮连接或底端设置有轮座与下导向轮连接,表面设置有外螺纹;张紧弹簧套设在张紧叉杆上,两端分别与张紧套管和轮座相接;张紧螺母套设在张紧叉杆上,张紧螺母与张紧弹簧位于张紧套管的两侧。
5、上述自提升式多循环智能锚杆钻机中,进给机构还包括进给位移传感器和磁块;进给驱动件为进给油缸;进给位移传感器与进给油缸平行,顶端与二级顶板连接;磁块安装在进给座上;磁块和进给位移传感器相互感应,测量钻孔机构和锚固机构的位移和速度。
6、上述自提升式多循环智能锚杆钻机中,三块钻锚箱切换导向板并排设置,中间的钻锚箱切换导向板为工作位,两侧的钻锚箱切换导向板为等待位;钻锚箱切换导向板上平行设置有钻锚箱切换轨道和钻锚箱切换导向孔;钻箱切换移动件上设置有钻箱切换滑槽和钻箱切换导向柱,钻箱切换滑槽与钻锚箱切换轨道滑动相接,钻箱切换导向柱与钻锚箱切换导向孔滑动相接;锚箱切换移动件上设置有锚箱切换滑槽和锚箱切换导向柱,锚箱切换滑槽与钻锚箱切换轨道滑动相接,锚箱切换导向柱与钻锚箱切换导向孔滑动相接;钻锚箱切换机构还包括钻锚箱固定件、切换位移传感器;钻锚箱固定件用于连接钻箱切换移动件和钻锚箱切换驱动件以及连接锚箱切换移动件和钻锚箱切换驱动件;切换位移传感器用于测量钻箱和锚箱的位移。
7、上述自提升式多循环智能锚杆钻机中,钻锚箱切换机构还包括钻锚箱切换座;钻锚箱切换座与进给座连接;钻锚箱切换驱动件为钻锚箱切换油缸,固定杆固定在钻锚箱切换座耳座上,滑动筒与固定杆滑动连接;钻箱切换移动件上还设置有钻箱固定孔;锚箱切换移动件上还设置有锚箱固定孔;钻锚箱固定件为钻锚箱固定油缸,采用双出杆结构,固定筒与钻锚箱切换油缸的滑动筒连接,两根伸缩杆用于与钻箱固定孔和锚箱固定孔连接。
8、上述自提升式多循环智能锚杆钻机中,锚杆输送机构还包括锚杆安装座滑动轨道、机械手安装架驱动件和机械手驱动件;上护臂和下护臂上均设置有锚杆安装座滑动轨道;锚杆安装座与锚杆安装座滑动轨道滑动连接;机械手安装架驱动件用于驱动上滑架与上护臂同步升降;机械手驱动件用于驱动机械手向锚杆安装座所在方向伸出以及驱动机械手复位。
9、上述自提升式多循环智能锚杆钻机中,锚杆安装座驱动件为锚杆安装座推移油缸;锚杆安装座推移油缸的缸体与护臂耳座连接,杆体与锚杆安装座连接;机械手安装架驱动件为机械手安装架伸缩油缸,两端分别与上滑架和下滑架连接;机械手驱动件为机械手推进油缸,两端分别与机械手和机械手安装架连接。
10、上述自提升式多循环智能锚杆钻机中,药卷输送机构还包括导向筒、钻杆限位托辊;导向筒包括外筒和内筒,外筒固定在上护臂上,内筒与对中架连接,内筒由对中架驱动件驱动沿外筒伸缩;钻杆限位托辊安装在导向管上,用于在钻孔时对钻杆对中限位;药卷装填组件包括固定座、压紧座、连接螺杆、压紧弹簧、压紧螺母、柔索输送轮、柔索输送轮驱动件、柔索;固定座上设置有送药孔ⅱ,固定座与提升块连接,送药孔ⅱ与送药孔ⅰ对齐;连接螺杆穿过压紧座,端部与固定座连接;压紧弹簧和压紧螺母套设在连接螺杆上,压紧弹簧位于压紧座和压紧螺母之间;固定座和压紧座上均安装有柔索输送轮,两组柔索输送轮相对设置,由柔索输送轮驱动件驱动旋转;柔索穿过两组柔索输送轮之间的空隙、送药孔ⅱ、送药孔ⅰ,由柔索输送轮压紧。
11、上述自提升式多循环智能锚杆钻机中,对中架驱动件为对中架推移油缸,两端分别与外筒和内筒连接;导向筒内安装有对中位移传感器,用于测量对中架的位移;装药管架驱动件为装药管架伸缩油缸,两端分别与固定架和滑动架连接;提升块驱动件为提升块伸缩油缸,缸体通过油缸座安装在导向管上,杆体与提升块连接;提升块伸缩油缸内安装有送药位移传感器,用于测量锚杆凝固药的位移。
12、与现有技术相比,本发明具有以下有益效果。
13、(1)可缩短支护施工的时间:传统的锚杆支护时间占到了巷道掘进时间的2/3,采用上述自提升式多循环智能锚杆钻机施工后,单根锚杆支护时间控制在3分钟左右,缩短40%的施工时间,步提高了工作效率。
14、(2)可降低工人的劳动强度:传统的支护设备主要依靠人工扛、抬、举等完成,人员劳动强度大,采用上述自提升式多循环智能锚杆钻机施工后,实现钻孔、装药卷、上锚杆、紧固锚杆等锚杆支护作业全自动操作,无需人工送药,上锚杆,紧固等工序,极大降低了工人的劳动强度。
15、(3)可提高施工的安全性,极大降低职业病发病率:传统的支护设备操作人员处于空顶区易产生危险,同时操作人员与粉尘源接近可大量的呼吸性粉尘,每年发生的锚杆支护巷道冒顶事故高达数百起,锚护行业人员患肺硒病40万人左右,采用上述自提升式多循环智能锚杆钻机施工后,无需人工操作,远离施工区域,保证操作人员的安全和健康。
16、(4)可降低操作人数,提高生产效率:传统的1台单体锚杆钻机需要3-4人配合,上述自提升式多循环智能锚杆钻机仅仅需1-2人作业,减少了工作面的人数,降低了人员成本。
17、(5)上述自提升式多循环智能锚杆钻机可根据巷道高度进行高度自调整,适用范围更广泛,可满足不同巷道锚杆支护时钻架接顶操作。
本文地址:https://www.jishuxx.com/zhuanli/20240726/113936.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。