一种用于煤矿瓦斯检测的智能机器人的制作方法
- 国知局
- 2024-07-27 10:49:47
本发明涉及煤矿瓦斯监测监控,具体涉及一种用于煤矿瓦斯检测的智能机器人。
背景技术:
1、煤矿机器人是能依靠随身动力和自主控制能力来实现某种特定采矿功能的一种机器,可以通过受人指挥、预先编程、人工智能规划的方式,协助或替代人的采矿作业劳动或危险岗位的操作。广义煤矿机器人的内涵十分丰富,按照井下作业区域、作业功能定位的不同,综合来看煤矿机器人可划分为五大类,即掘进类、采煤类、运输类、安控类、救援类。
2、煤矿安全监控系统是指对煤矿的瓦斯、风速、一氧化碳、烟雾、温度、环境参数和矿井生产、运输、提升和排水环节的机电设备工作状态进行检测和控制,用计算机分析处理并取得数据的一种检测,其中瓦斯检测是煤矿安全检测中最重要的部分,瓦斯是煤矿中常见的气体,当期浓度达到一定程度时,极易发生爆炸,对作业人员的生命安全造成极大的威胁,通过设置移动巡检机器人在矿场内部面积进行较大的区域的瓦斯气检测。
3、现有的用于煤矿瓦斯检测的智能机器人,其位于矿场内部移动将矿场内气体吸入携带的瓦斯检测机构进行瓦斯浓度检测,但不便对检测的高度进行灵活调整,针对于矿场内部高度较低的位置影响通过性,同时矿场内部灰尘较大,摄像头部分容易沾染灰尘,不便于进行清理影响视线,对于瓦斯检测机构的拆装较为麻烦。
技术实现思路
1、为解决上述技术问题,本发明所采用的技术方案是:
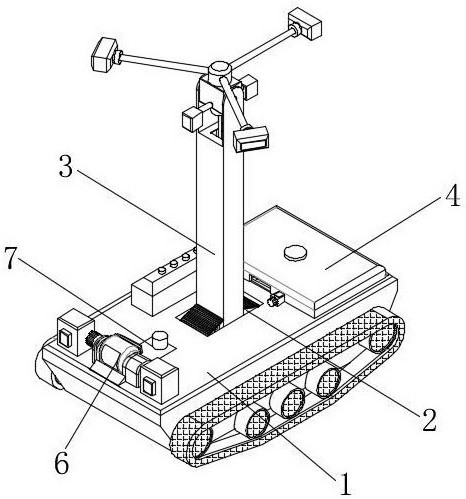
2、一种用于煤矿瓦斯检测的智能机器人,包括带有履带的移动车体,所述移动车体内部的上方开设有安装槽,所述安装槽的内部活动安装有升降组件,所述移动车体内部的后方固定安装有安装组件,所述安装组件的内部安装有瓦斯气体检测机构,所述移动车体顶部的前方固定安装有摄像头组件,所述移动车体内部的前方固定安装有位于摄像头组件外部的清洁组件。
3、本发明技术方案的进一步改进在于:所述升降组件包括有活动支架和驱动电机一,所述活动支架活动铰接于安装槽的内侧,所述驱动电机一固定安装于安装槽的内部,所述活动支架内部的下方固定连接有从动蜗轮,所述驱动电机一输出轴的前侧固定安装有与从动蜗轮相啮合的驱动蜗杆,所述活动支架的顶部开设有安装口,所述安装口的内部活动安装有垂直活动头,所述垂直活动头的外侧等距固定安装有防尘吸入罩。
4、本发明技术方案的进一步改进在于:所述安装组件包括有固定箱和扣槽,所述固定箱的顶部活动铰接有顶盖,所述顶盖的前侧固定连接有卡扣,所述移动车体的顶部固定安装有与卡扣相对应的扣槽,所述顶盖的内部固定连接有滑动套,所述滑动套的内部活动卡接有连接柱,所述连接柱的底部固定连接有压紧板,所述滑动套的内部活动卡接有位于连接柱上方的支撑弹簧,所述固定箱内部的底面活动卡接有橡胶垫。
5、本发明技术方案的进一步改进在于:所述摄像头组件包括有固定架和摄像头,所述摄像头转动安装于固定架的内侧,所述固定架的外侧固定安装有与摄像头相连接的驱动部。
6、本发明技术方案的进一步改进在于:所述清洁组件包括有u型结构的转动杆和清洁液箱,所述转动杆转动安装于固定架的外侧,所述转动杆的内侧固定安装有喷水仓和擦拭棉板,所述清洁液箱固定安装于移动车体内部的前方,所述移动车体的顶部固定安装有分别与清洁液箱和喷水仓相连通的泵机,所述移动车体的顶部固定安装有伺服电机,所述伺服电机与转动杆相连接。
7、本发明技术方案的进一步改进在于:所述垂直活动头包括有活动块,所述活动块转动安装于安装口的内侧,所述活动块的外侧固定连通有连接硬管,所述连接硬管的外侧固定连接有连接头,所述防尘吸入罩活动安装于连接头内,所述活动块的前后两侧均凯神有螺纹孔,所述螺纹孔的内部螺纹连接有固定杆,所述固定杆的外侧固定连接有配重块。
8、本发明技术方案的进一步改进在于:所述活动支架的内部和活动块的内部均中空设置,所述活动支架的后侧开设有过线口,所述活动块的底部固定连接有穿过过线口与瓦斯气体检测机构相连接的输气软管。
9、本发明技术方案的进一步改进在于:所述擦拭棉板贴合于摄像头的外壁,所述擦拭棉板通过魔术贴粘接于转动杆内侧。
10、本发明技术方案的进一步改进在于:所述橡胶垫的内侧开设有瓦斯气体检测机构相适配的凹槽,所述瓦斯气体检测机构卡接于橡胶垫和压紧板之间。
11、需要说明的是本装置为符合防爆安全规程的设备。
12、由于采用了上述技术方案,本发明相对现有技术来说,取得的技术进步是:
13、本发明提供一种用于煤矿瓦斯检测的智能机器人,通过设置有位于安装槽内部的升降组件,通过控制升降组件可沿安装槽内进行前后转动从而进行高度的调整,从而可调整检测气体的高度,以对矿内不同高度的气体进行瓦斯浓度的检测,同时可通过折叠升降组件提高通过性。
14、本发明提供一种用于煤矿瓦斯检测的智能机器人,通过设置安装组件,通过打开安装组件并将瓦斯气体检测机构安装于安装组件的内部并关闭安装组件进行封闭,通过瓦斯气体检测机构固定于安装组件的内部进行携带使用,同时通过打开安装组件可便于将瓦斯气体检测机构进行拆装,使用方便。
15、本发明提供一种用于煤矿瓦斯检测的智能机器人,通过设置于摄像头组件外部的清洁组件在摄像头组件外部灰尘沾染较多影响视线时,通过操纵清洁组件从而可对摄像头组件上喷洒清洁液及对摄像头组件进行往复擦拭,以清理外部附着灰尘,保证摄像头组件的视野正常。
16、本发明提供一种用于煤矿瓦斯检测的智能机器人,通过设置垂直活动头可沿安装口内进行转动,配合配重块使垂直活动头保持于地面垂直使位于连接硬管外侧的防尘吸入罩可吸入不同方位的气体检测,以提高效率及准确性。
技术特征:1.一种用于煤矿瓦斯检测的智能机器人,包括带有履带的移动车体(1),其特征在于:所述移动车体(1)内部的上方开设有安装槽(2),所述安装槽(2)的内部活动安装有升降组件(3),所述移动车体(1)内部的后方固定安装有安装组件(4),所述安装组件(4)的内部安装有瓦斯气体检测机构(5),所述移动车体(1)顶部的前方固定安装有摄像头组件(6),所述移动车体(1)内部的前方固定安装有位于摄像头组件(6)外部的清洁组件(7)。
2.根据权利要求1所述的一种用于煤矿瓦斯检测的智能机器人,其特征在于:所述升降组件(3)包括有活动支架(31)和驱动电机一(32),所述活动支架(31)活动铰接于安装槽(2)的内侧,所述驱动电机一(32)固定安装于安装槽(2)的内部,所述活动支架(31)内部的下方固定连接有从动蜗轮(33),所述驱动电机一(32)输出轴的前侧固定安装有与从动蜗轮(33)相啮合的驱动蜗杆(34),所述活动支架(31)的顶部开设有安装口(35),所述安装口(35)的内部活动安装有垂直活动头(36),所述垂直活动头(36)的外侧等距固定安装有防尘吸入罩(37)。
3.根据权利要求2所述的一种用于煤矿瓦斯检测的智能机器人,其特征在于:所述安装组件(4)包括有固定箱(41)和扣槽(44),所述固定箱(41)的顶部活动铰接有顶盖(42),所述顶盖(42)的前侧固定连接有卡扣(43),所述移动车体(1)的顶部固定安装有与卡扣(43)相对应的扣槽(44),所述顶盖(42)的内部固定连接有滑动套(45),所述滑动套(45)的内部活动卡接有连接柱(46),所述连接柱(46)的底部固定连接有压紧板(47),所述滑动套(45)的内部活动卡接有位于连接柱(46)上方的支撑弹簧(48),所述固定箱(41)内部的底面活动卡接有橡胶垫(49)。
4.根据权利要求1所述的一种用于煤矿瓦斯检测的智能机器人,其特征在于:所述摄像头组件(6)包括有固定架(61)和摄像头(62),所述摄像头(62)转动安装于固定架(61)的内侧,所述固定架(61)的外侧固定安装有与摄像头(62)相连接的驱动部(63)。
5.根据权利要求4所述的一种用于煤矿瓦斯检测的智能机器人,其特征在于:所述清洁组件(7)包括有u型结构的转动杆(71)和清洁液箱(74),所述转动杆(71)转动安装于固定架(61)的外侧,所述转动杆(71)的内侧固定安装有喷水仓(72)和擦拭棉板(73),所述清洁液箱(74)固定安装于移动车体(1)内部的前方,所述移动车体(1)的顶部固定安装有分别与清洁液箱(74)和喷水仓(72)相连通的泵机(75),所述移动车体(1)的顶部固定安装有伺服电机(76),所述伺服电机(76)与转动杆(71)相连接。
6.根据权利要求2所述的一种用于煤矿瓦斯检测的智能机器人,其特征在于:所述垂直活动头(36)包括有活动块(361),所述活动块(361)转动安装于安装口(35)的内侧,所述活动块(361)的外侧固定连通有连接硬管(362),所述连接硬管(362)的外侧固定连接有连接头(363),所述防尘吸入罩(37)活动安装于连接头(363)内,所述活动块(361)的前后两侧均凯神有螺纹孔(364),所述螺纹孔(364)的内部螺纹连接有固定杆(365),所述固定杆(365)的外侧固定连接有配重块(366)。
7.根据权利要求6所述的一种用于煤矿瓦斯检测的智能机器人,其特征在于:所述活动支架(31)的内部和活动块(361)的内部均中空设置,所述活动支架(31)的后侧开设有过线口(38),所述活动块(361)的底部固定连接有穿过过线口(38)与瓦斯气体检测机构(5)相连接的输气软管。
8.根据权利要求5所述的一种用于煤矿瓦斯检测的智能机器人,其特征在于:所述擦拭棉板(73)贴合于摄像头(62)的外壁,所述擦拭棉板(73)通过魔术贴粘接于转动杆(71)内侧。
9.根据权利要求3所述的一种用于煤矿瓦斯检测的智能机器人,其特征在于:所述橡胶垫(49)的内侧开设有瓦斯气体检测机构(5)相适配的凹槽,所述瓦斯气体检测机构(5)卡接于橡胶垫(49)和压紧板(47)之间。
技术总结本发明公开了一种用于煤矿瓦斯检测的智能机器人,涉及煤矿瓦斯监测监控技术领域,包括带有履带的移动车体,所述移动车体内部的上方开设有安装槽,所述安装槽的内部活动安装有升降组件,所述移动车体内部的后方固定安装有安装组件,所述安装组件的内部安装有瓦斯气体检测机构,所述移动车体顶部的前方固定安装有摄像头组件,所述移动车体内部的前方固定安装有位于摄像头组件外部的清洁组件。本发明通过设置有位于安装槽内部的升降组件,通过控制升降组件可沿安装槽内进行前后转动从而进行高度的调整,从而可调整检测气体的高度,以对矿内不同高度的气体进行瓦斯浓度的检测,同时可通过折叠升降组件提高通过性。技术研发人员:赵鹏翔,徐涛,常泽晨,张艺波,卓日升,鲁丹华,刘妍群,曹聪颖,金权,王呈岳受保护的技术使用者:甘肃多慧达智能装备科技有限责任公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240726/115862.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表