一种地面离线智能接立根及高效起下钻的钻机及工作方法与流程
- 国知局
- 2024-07-27 10:52:19
本发明涉及一种地面离线智能接立根及高效起下钻的钻机及工作方法、甩钻方法,属于石油钻机装置。
背景技术:
1、丛式井钻机作业时,井口间距一般每间隔10-15米距离设置1口,钻机在钻完一口井后需要移动至下一口井。井口间短距离移动时需要钻机带立根整体移动,同时在移动的过程中需要越过采油树和方井,采油树的尺寸一般高宽均在4米左右。这就需要钻机和立根盒以及配套的前场管柱处理设备均需要具有平移和越障功能。虽然目前自动化钻机具有丛式井作业越障功能,但是立根均放在钻台底座上,造成钻机整体移动时载荷大且重心高,成本高,影响移动速度和平稳性。钻机搬家需要长距离运输时,在钻机搬家前需要将立根从钻台拆卸成单根,甩到钻台下,然后以减少钻机载荷和重心高度,然后在将井架直立/或放到拖挂运输至下一井场。拆卸立根的时间一般在3-4天左右,造成搬家时间长和成本较高。
2、cn13803000a公开了一种陆地钻机离线接立根的管柱处理系统专利,该专利完全在原立根区域进行开发和设计,增加了井架负载,占用了钻台面较大面积,增加了主体重量的同时,钻机受风载荷影响大,钻杆立柱重心偏高,稳定性差,在钻机进行快速移运时风险较大。
3、cn106194067a公开了一种离线建立根装置,该专利对立根架进行了设计,能够进行立根的离线建立,然而工作时,所有钻杆完全依靠配套的机械手来完成,未满足钻铤的立根建立,致使钻铤无法通过该设备完成到井口的最终操作,需要借助外部干预,特别是在下方机械手出现故障,整个钻井都会受影响,显然设计是欠缺的、不太完整的。
4、目前提出的所有离线作业钻机,离线作业单元均不能脱离钻机独立作业,而且不能进行立根整体竖直移运,效率和经济性不高。
技术实现思路
1、本发明的发明目的在于:针对上述存在的问题,提供一种地面离线智能接立根及高效起下钻的钻机及工作方法、甩钻方法,立根盒独立放置在地面,能脱离钻机进行离线接卸立根和立根排放作业,提高搬家效率,有效提高起下钻作业效率,降低运营成本。
2、本发明采用的技术方案如下:
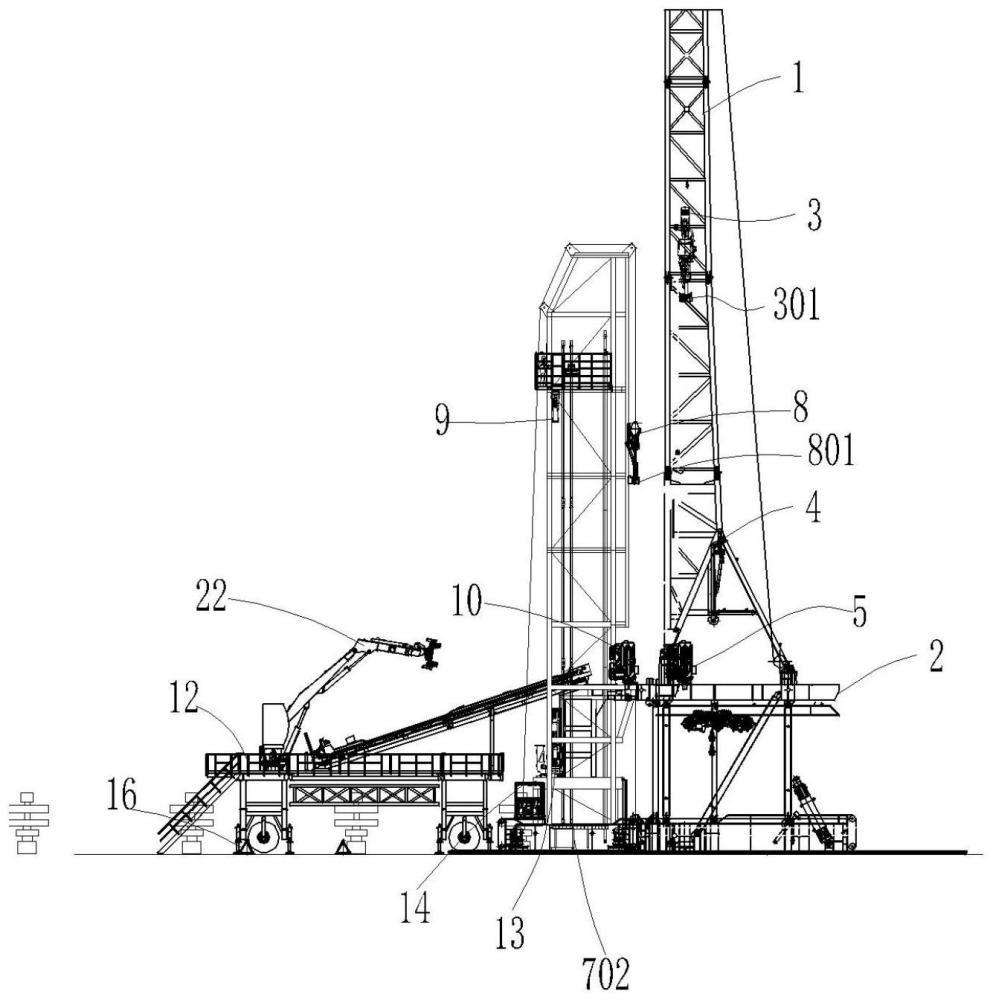
3、一种地面离线智能接立根及高效起下钻的钻机,包括钻机主体、立根盒、鼠洞机构、动力猫道以及钻具储备机构,所述钻机主体包括井架底座以及设置于井架底座上的井架架体,所述井架架体设置有可上下移动的顶驱吊卡,所述井架底座设置有用于接卸立根上卸扣的第一铁钻工,以及安装在井口中心的液压卡瓦,在钻机主体用于匹配动力猫道的前侧所在地面设置有立根盒,所述动力猫道为高架动力猫道,所述动力猫道上设置有用于抓取钻具的关节吊,所述动力猫道的另一端部与立根盒匹配,所述鼠洞机构设置于立根盒面向钻机主体的一侧,且面向钻机主体。
4、进一步的,所述钻机主体面向立根盒的一侧设置有缺口,且位于鼠洞机构与钻机主体之间,所述井架架体上还设置有缓冲机械手。
5、进一步的,所述立根盒包括立根底座以及设置于立根底座上的框架,所述框架设置有动力二层台,所述动力二层台设置有用于存放钻具立根的钻具指梁,所述动力二层台的下方设置有推扶机械手,所述立根底座设置有举升机械手,所述框架靠近钻机主体的一侧设置有可上下移动的导向定位装置。
6、进一步的,所述推扶机械手和举升机械手采用u形行走路线,其用于行走的导轨结构对称。
7、进一步的,所述立根底座的下方还设置有用于立根盒整体平移的步进平移装置。
8、进一步的,所述立根底座还设置有便于立根盒拖移的拖挂连接耳板,所述拖挂连接耳板分别可以连接拖挂装置。
9、进一步的,所述导向定位装置包括液吊环倾斜装置、压吊卡、倾斜油缸、滑车架以及起升绞车,所述框架靠近钻机主体的一侧设置有与导向定位装置适配的导向定位导轨,通过起升绞车使导向定位装置沿着导向定位导轨上下移动。
10、进一步的,所述立根底座靠近钻机主体的一侧还设置有与井架底座高度匹配的第二铁钻工,以及用于控制的操控房,所述立根底座为拱形结构,其顶部底面高于采油树的高度。
11、进一步的,所述鼠洞机构为半开口动力鼠洞,所述半开口动力鼠洞包括上部分和下部分,上部分包括对中装置,所述对中装置通过支架安装于立根底座靠近钻机主体的一侧,下部分为承载台并设置于立根底座上,所述承载台与立根底座靠近钻机侧中心位置的侧面铰接,所述承载台可向上翻转。
12、进一步的,所述鼠洞机构还包括鼠洞卡瓦。
13、进一步的,所述对中装置包括半开口导向机构、旋转夹紧指头以及驱动油缸。
14、进一步的,所述动力猫道包括动力猫道底座,以及设置于动力猫道底座上的钻具支撑梁和支撑结构,所述钻具支撑梁上还设置有用于输送钻杆的滑靴,所述支撑梁的一端部安装在动力猫道底座上,另一端搭接在动力立根盒上。
15、进一步的,所述支撑结构包括顶升油缸和轮架;当工作时,顶升油缸伸出承载;当高架动力猫道移动时,顶升油缸缩回,使轮架承载。
16、进一步的,所述顶驱吊卡包括提升吊卡,以及用于调整提升吊卡位置的伸缩臂。
17、进一步的,所述井架架体面向立根盒一侧还设置有辅助起吊装置,所述辅助起吊装置包括设置于井架架体上的竖向导轨,在所述竖向导轨上还设置有可自转向的起吊本体。
18、一种离线建立立根和甩钻方法,采用上述的一种地面离线智能接立根及高效起下钻的钻机,其特征在于:包括以下步骤:
19、s1,关节吊从钻具储备机构上抓取单根钻杆,将单根钻杆发放至高架动力猫道的钻具支撑梁上,通过滑靴将钻杆推向鼠洞机构;
20、s2,调整液压吊卡,使液压吊卡关闭夹持钻杆,导向定位装置在绞车的拉动下向上行走,至钻杆单根下部接头高出动力鼠洞指定高度后,导向定位装置沿着导向定位导轨下行,将第一根钻杆单根放置在承载台内,对中装置动作夹住第一根钻杆;
21、s3,重复步骤s1和s2,导向定位装置提着第二根钻杆放置到鼠洞卡瓦内,控制鼠洞卡瓦关闭;
22、s4,导向定位装置再提着第三根钻杆与鼠洞动力卡瓦内的第二根钻杆对口,第二铁钻工将两根钻杆连接成双立根,导向定位装置再提着双立根与承载台内放置的钻杆对扣,第二铁钻工上扣,将三根钻杆连接成钻杆三立根;
23、或者,步骤s2至步骤s4为钻杆二立根的建立,包括以下步骤:
24、s21,调整液压吊卡,使液压吊卡关闭夹持钻杆,导向定位装置在绞车的拉动下向上行走,至钻杆单根下部接头高出动力鼠洞指定高度后,导向定位装置下行,将第一根钻杆单根放置在承载台内,对中装置动作夹住第一根钻杆;
25、s31,重复步骤s1至步骤s21,导向定位装置提着第二根钻杆与动力鼠洞内放置的上一根钻杆对扣,第二铁钻工动作,将两根钻杆连接成钻杆立根;
26、s5,立根盒的推扶机械手和地面举升机械手同时动作,钳头伸向鼠洞位置抓取钻杆立根,推扶机械手扶住钻杆立根上端,地面举升机械手夹持钻杆立根下端,然后导向定位装置的液压吊卡打开,地面举升机械手机械臂抬升,推扶机械手和地面举升机械手同时依次完成机械臂缩回,旋转,行走,机械臂伸出动作;地面举升机械手机械臂下降将钻杆立根放置预定位置,稳定钻杆立根;然后推扶机械手和地面举升机械手的钳体依次打开,机械臂缩回,行走至初始位置,进行下一立根排放动作;
27、s6,离线甩钻方法,按照步骤s1至s5逆向动作完成。
28、进一步的,还包括立根盒内钻杆立根的下钻和起钻方法,包括以下步骤;
29、t1,推扶机械手和地面举升机械手配合从动力二层台抓取钻杆立根,运至动力鼠洞位置;
30、t2,顶驱吊卡下行至既定高度,提升吊卡打开,使顶驱吊卡提住钻杆立根接头后关闭,推扶机械手和地面举升机械手钳体同步打开,提升吊卡带动钻杆立根上行至指定高度,钻杆立根与井口已有立根对扣,第一铁钻工将上下立根接在一起;
31、t3,液压卡瓦打开,顶驱吊卡带动钻杆柱下行至指定高度;液压卡瓦关闭卡住钻杆立根;提升吊卡打开,完成钻杆立根下钻流程;
32、t4,重复步骤t1至t3,可进行持续下钻;
33、t5,起钻时,按照步骤t1至t3的逆向动作。
34、一种单根钻具上钻下钻方法,采用上述的一种地面离线智能接立根及高效起下钻的钻机,包括以下步骤:
35、d1,关节吊从钻具储备机构上抓取单根钻杆,将单根钻杆发放至高架动力猫道的钻具支撑梁上,通过滑靴将钻杆推向井口;
36、d2,调整顶驱吊卡位置,随后提升吊卡关闭提住钻杆接头;顶驱吊卡上行,缓冲机械手伸出,扶正钻杆单根下端;顶驱吊卡继续上行,缓冲机械手随动变幅,使钻杆单根与上一柱钻杆单根对扣;
37、d3,随后第一铁钻工将上下钻杆接在一起;液压卡瓦打开,顶驱带动钻杆柱下行至指定高度;液压卡瓦关闭卡住钻杆立根;提升吊卡打开,完成钻杆单根上钻台流程;
38、d4,重复步骤d1至d3,可进行持续上钻;
39、d5,单根钻具甩钻时,按照步骤d1至d3逆向动作完成。
40、一种地面离线智能接立根及高效起下钻的钻机搬家拖挂运输方法,采用上述的一种地面离线智能接立根及高效起下钻的钻机,包括以下步骤:
41、b1,先将高架动力猫道的钻具支撑梁下放至动力猫道底座上,关节吊摆放至运输位固定;顶升油缸缩回,使轮架承载;支撑结构前后方向外侧设置有猫道连接耳板,拖挂时,连接架的一端与猫道连接耳板连接,另一端与牵引车连接整体移运;
42、b2,独立的立根盒在步进装置的驱动下向钻机相反方向行走,离开指定距离后,步进装置将独立的立根盒整体抬高,拖挂连接耳板分别可以连接前后拖挂装置,立根盒可在满立根的情况下通过牵引车整体移运,钻机单元也采用同样方法整体用牵引车整体移运。
43、一种连续作业方法,采用上述的一种地面离线智能接立根及高效起下钻的钻机,包括以下步骤:
44、a1,顶驱吊卡在井口钻进和/或下钻作业的同时,推扶机械手和举升机械手配合将立根从动力二层台存储位移运至鼠洞机构位置,此时辅助起吊装置下行至交接等待位置并接过立根;
45、a2,辅助起吊装置上行,同时推扶机械手和举升机械手同步动作至动力二层台指定的位置抓取立根;辅助起吊装置上行至定立根的下端高出井架底座后回转使起吊本体面向井口;
46、a3,当顶驱吊卡将上一柱立根完全钻进后,顶驱吊卡上行至指定位置,辅助起吊装置与顶驱吊卡交接立根,完成后辅助起吊装置回到与推扶机械手和举升机械手配合交接下一立根位置,顶驱吊卡在井口钻进和/或下钻作业;
47、a4,连续起钻作业时,按照步骤a1至a3逆向动作进行。
48、进一步的,所述顶驱吊卡设置有伸缩臂,具体下钻方法包括以下步骤:
49、在步骤a3中,当顶驱吊卡将立根完全钻进和/或下完,液压卡瓦卡住立根,顶驱伸缩臂缩回让出井口上方通道;随后辅助起吊装置动作使立根中心对准井口已有钻杆中心,第一铁钻工上扣;
50、上下立根完成连接后,顶驱吊卡上行至交接位置,顶驱伸缩臂向井口伸出,辅助起吊装置与提升吊卡交接立根,完成后辅助起吊装置回到与推扶机械手和举升机械手配合交接下一立根位置,顶驱吊卡在井口钻进和/或下钻作业。。
51、综上所述,由于采用了上述技术方案,本发明的有益效果是:
52、1、本发明的一种地面离线智能接立根及高效起下钻的钻机,在结构设计上借助立根盒独立设置的方式有效的实现将立根盒进行模块化的设计,以独立的模块设计能够有效的实现整个装置的牵引设计,借助该设计进一步提升了整个立根盒的搬家效率,进而降低了整体的运营成本;
53、2、本发明的一种地面离线智能接立根及高效起下钻的钻机及工作方法、甩钻方法,在具体的结构设计上,能够有效的实现整个钻机在运行过程中的起钻甩钻的工作效率,并充分利用所有结构的时间空隙同步进行多操作,提高了整个钻机的工作效率;
54、3、本发明的一种地面离线智能接立根及高效起下钻的钻机及工作方法、甩钻方法,在结构的设计上,独立立根盒可以单独作为一个单元配置不同钻机使用,提高该系统的使用频次,进而降低运营成本;
55、4、本发明的一种地面离线智能接立根及高效起下钻的钻机及工作方法、甩钻方法,具有离线建三立根功能,满足丛式井越障,在钻机底座和井架上设置有钻井管柱处理系统,可实现钻井管柱(包含钻杆、钻铤、套管)上下钻台和起下钻自动化作业。
本文地址:https://www.jishuxx.com/zhuanli/20240726/116158.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表