一种磁性微纳米机器人及其制备方法和应用
- 国知局
- 2024-07-27 12:37:49
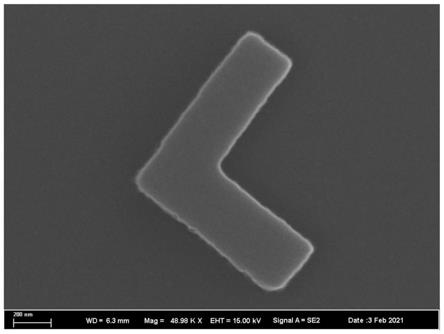
1.本发明属于微纳米机器人技术领域,具体涉及一种磁性微纳米机器人及其制备方法和应用。背景技术:2.微纳米机器人指的是尺度在微纳米级别(几纳米至几百微米)的小型机器人,其在解决分子尺寸器件的组装和利用问题方面具有突出的优势,已经成为一个快速发展的跨学科领域。基于微纳米机器人尺寸小,可以进行三维控制运动的优点,微纳米机器人在医学方面的应用有体内微小目标识别、靶向载药、微创手术等。3.由于微纳米机器人尺寸微小,其运动时处于雷诺系数很低的环境中,物体可看作在一个非常粘滞、微小以及缓慢的环境中运动,粘滞力占主导作用,惯性力则可忽略不计。在这种条件下,若想驱动微纳米机器人,必须源源不断地为其提供动力。目前提出的微纳米机器人驱动方式包括自驱动和外场驱动两种。自驱动是指微纳米机器人从所处流体环境中获得动力,从而产生运动,按照获得动力的方式不同,可分为自电泳驱动、自扩散泳驱动、自热泳驱动、气泡驱动等方式。外场驱动是指微纳米机器人在施加的外场的作用下发生运动,外场驱动的方式可分为磁场驱动、声场驱动、光驱动等。其中,磁场驱动微纳米机器人由于所需磁场强度低,且低频率磁场能够穿透生物组织,对生物体无害,因此是一种非常有前景的微纳米机器人类型。4.cn 107986230a公开了一种图形化仿生磁性微纳米机器人制备方法,包括准备聚四氟乙烯基底、紫铜片和多孔聚碳酸酯模板;工作电极的制备;涂覆光刻胶;曝光与显影;配制酸性电解液;多孔聚碳酸酯模板的孔洞润湿;钴纳米线及钴基底的制备;纳米线及钴基底的转移;移除紫铜片及洗除多孔聚碳酸酯模板;与聚四氟乙烯基底组合:在形成一侧的聚四氟乙烯基板与钴纳米线阵列后,另一侧的制备方式相同,构成基于聚四氟乙烯基板的双面钴纳米线阵列;经过切割,获得磁性微纳米机器人。但是这种方法比较复杂,且多孔聚碳酸酯模板只能一次性制备微纳米机器人,不能重复使用。5.nelson课题组(tottori s,zhang l,qiu f,et al.magnetic helical micromachines:fabrication,controlled swimming,and cargo transport.adv mater,2012,24:811–816)提出了以三维激光直写技术(3d direct laser writing,dlw)制备螺旋推进式机器人,通过精确控制激光聚焦点的移动,“写”出一个个螺旋形结构,随后通过电子束蒸镀技术依次沉积ni和ti薄膜,可以赋予这些螺旋型机器人磁性和较好的生物相容性。在外加旋转均匀磁场的作用下,这类螺旋推进式机器人在水中可达180μm/s的运动速率。但是激光直写成本较高,效率低,且制备的微纳米机器人尺寸越小,效率就越低,难以大批量制备微纳米机器人。6.因此,在本领域有待研究一种成本低,且能够快速、大批量制备微纳米机器人的方法。技术实现要素:7.针对现有技术存在的不足,本发明的目的在于提供一种磁性微纳米机器人的制备方法和应用。相比于现有的激光直写方法,本发明提供的制备方法成本更低,可快速大批量地制备磁性微纳米机器人。8.为达此目的,本发明采用以下技术方案:9.本发明提供一种磁性微纳米机器人的制备方法,所述制备方法包括如下步骤:10.(1)在第一基片上形成光刻胶层,经曝光和显影后将掩模板上的图案转移到所述光刻胶层上,得到第一微纳米机器人硬模板;11.(2)用软质倒模材料对步骤(1)得到的第一微纳米机器人硬模板进行倒模,得到微纳米机器人软模板;12.(3)在第二基片上形成硬质胶层,然后采用纳米压印的方法将所述微纳米机器人软模板上的图形转移到所述硬质胶层上,得到第二微纳米机器人硬模板;13.(4)在步骤(3)得到的第二微纳米机器人硬模板上形成磁性材料层和生物相容材料层,超声,得到磁性微纳米机器人。14.需要说明的是,本发明中所述第一微纳米机器人硬模板和第二微纳米机器人硬模板为凸板,制备得的磁性微纳米机器人的形状与模板图形相同。对于模板图形,本领域技术人员可以根据需要进行选择,只要保证该形状的微纳米机器人能够在磁场作用下运动即可。15.本发明采用纳米压印的方法可由微纳米机器人软模板多次重复制备第二微纳米机器人硬模板,然后在其上形成磁性材料层和生物相容材料层,通过超声振动使模板图形上的磁性材料层和生物相容材料层脱落下来,形成二维的微纳米机器人,而模板图形区域之外的磁性材料层和生物相容材料层由于面积较大,结合牢固,不会脱落。相比于现有的激光直写方法,本发明提供的制备方法成本更低,制备效率更高,可大批量制备微纳米机器人。16.作为本发明的优选技术方案,步骤(1)中所述第一基片为硅片。17.优选地,步骤(1)中所述电子束光刻胶层的厚度为100‑500nm,例如100nm、150nm、200nm、250nm、300nm、350nm、400nm、450nm或500nm。18.本发明对于光刻胶的种类没有特殊限制,本领域技术人员可根据需要进行选择,示例性地可以选择电子束胶或紫外光刻胶。一般地,电子束胶曝光精度较高,可用于制备纳米机器人;紫外光刻胶曝光精度较低,可用于制备微米机器人。19.作为本发明的优选技术方案,所述制备方法还包括:在步骤(2)中所述倒模之前,对所述第一微纳米机器人硬模板进行烷基化处理。20.本发明中,进行烷基化处理的目的是降低第一微纳米机器人硬模板的粘附性,以便倒模后硬模板与软模板的分离。21.优选地,所述烷基化处理的方法为:将所述第一微纳米机器人硬模板在烷基化试剂中浸泡5‑12h,例如5h、6h、7h、8h、9h、10h、11h或12h。22.优选地,所述烷基化试剂为三甲基氯硅烷。23.作为本发明的优选技术方案,步骤(2)中所述软质倒模材料为硅橡胶、聚甲基硅氧烷(pdms)、聚对苯二甲酸乙二酯(pet)、聚对苯二甲酸丁二酯(pbt)、尼龙(pa)或聚碳酸脂(pc)中的任意一种。24.优选地,步骤(2)中所述倒模的方法为:将第一微纳米机器人硬模板置于培养皿中,加入所述软质倒模材料的前体溶液,固化后揭开形成的软质倒模材料膜,得到所述微纳米机器人软模板。25.作为本发明的优选技术方案,步骤(3)中所述第二基片为硅片。26.优选地,步骤(3)中所述硬质胶层的材料为pmma或su‑8 2002。27.优选地,所述硬质胶层的厚度为100‑500nm,例如100nm、150nm、200nm、250nm、300nm、350nm、400nm、450nm或500nm。28.优选地,所述硬质胶层的厚度大于所述磁性微纳米机器人的厚度。29.作为本发明的优选技术方案,所述纳米压印的方法为:将所述微纳米机器人软模板和带有硬质胶层的第二基片置于纳米压印机中,恒温加压,使所述硬质胶层材料填充到所述微纳米机器人软模板的空腔中,降温后图形固化。30.优选地,所述纳米压印的温度为tg~tg+50℃,其中tg为所述硬质胶层材料的玻璃化转变温度。31.优选地,所述纳米压印的压力为2‑40kn;例如可以是2kn、3kn、5kn、8kn、10kn、15kn、20kn、25kn、30kn、35kn或40kn等。32.作为本发明的优选技术方案,步骤(4)中形成所述磁性材料层和生物相容材料层的方法为电子束蒸镀、电子束溅射或双腔磁控溅射,优选为电子束蒸镀。33.作为本发明的优选技术方案,所述磁性材料层的材料选自镍、钴或四氧化三铁中的一种或至少两种的组合。34.优选地,所述生物相容材料层的材料选自钛、铂、锌、铁、二氧化钛或氧化锌中的一种或至少两种的组合。35.其中镍和钛成本较低,且镍钛合金在人体内具有较好的生物兼容性,可增加纳米机器人在人体内的应用潜力。通过进一步对纳米机器人表面进行官能团的修饰,可以利用纳米机器人进行各种药物的运载和释放。36.作为本发明的优选技术方案,所述磁性材料层的厚度为50‑130nm;例如可以是50nm、55nm、60nm、65nm、70nm、75nm、80nm、85nm、90nm、95nm、100nm、105nm、110nm、115nm、120nm、125nm或130nm等。37.优选地,所述生物相容材料层的厚度为10‑50nm;例如可以是10nm、15nm、20nm、25nm、30nm、35nm、40nm、45nm或50nm等。38.作为本发明的优选技术方案,所述制备方法包括如下步骤:39.(1)使用水、丙酮、异丙醇和水依次冲洗硅片,并用氮气吹干,保持硅片表面清洁;在处理后的硅片表面旋涂200nm厚的电子束光刻胶层,转速2000r/min,时间为60s,然后放到90℃热板上,烘干1‑3min;将带有电子束负胶层的硅片样品放入电子束曝光机中,设置曝光剂量800uc/cm2,在掩模板下进行曝光;将曝光后的硅片样品放入电子束显影液中进行显影,显影时间40‑60s;将显影后的硅片样品放在90℃热板上,烘干1‑2min,得到第一微纳米机器人硬模板;40.(2)将步骤(1)得到的第一微纳米机器人硬模板放入三甲基氯硅烷溶液中,浸泡6小时;取出样品后用氮气吹干,放入培养皿中,加入质量比10:1的pdms和固化剂的混合液,然后放入真空箱里抽真空2小时,再在85℃烘箱中放置8小时;从烘箱中取出样品,从培养皿边缘揭开固化后形成的pdms膜,倒模得到微纳米机器人软模板;41.(3)在硅片上旋涂100nm左右厚的pmma胶层,转速3000r/min,时间60s,然后放在85℃热板上烘烤1min;将步骤(2)得到的微纳米机器人软模板和带有pmma胶层的硅片放入纳米压印机中,设置纳米压印温度为105℃,压力2‑40kn,恒温加压,使流动的pmma胶填充微纳米机器人软模板空腔,降温后图形固化;将样品从纳米压印机中取出,用镊子揭开微纳米机器人软模板,得到第二微纳米机器人硬模板;42.(4)在步骤(3)得到的第二微纳米机器人硬模板上电子束蒸镀50‑130nm厚的镍金属层和10‑50nm厚的钛金属层,将蒸镀后的样品置于水中超声,收集超声之后的溶液,过滤得到微纳米机器人。43.另一方面,本发明提供了如上所述的磁性微纳米机器人在制备体内微小目标识别材料、靶向载药材料或微创手术材料中的应用。44.与现有技术相比,本发明具有以下有益效果:45.本发明将纳米压印这一高精密的微纳加工技术应用于制备微纳米机器人,可由微纳米机器人软模板多次重复、快速地制备第二微纳米机器人硬模板,使得大批量制备微纳米级别的机器人成为可能,且达到20nm级别的高精度。与现有的激光直写方法相比,本发明提供的制备方法成本更低,制备效率更高,软模版可以多次重复利用,适合大批量制备微纳米机器人。附图说明46.图1为本发明实施例1提供的纳米机器人的扫描电子显微镜照片,标尺为200nm。47.图2为本发明实施例2提供的纳米机器人的扫描电子显微镜照片,标尺为200nm。48.图3为本发明实施例3提供的纳米机器人的扫描电子显微镜照片,标尺为200nm。具体实施方式49.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。本领域技术人员应该明了,所述具体实施方式仅仅是帮助理解本发明,不应视为对本发明的具体限制。50.本发明实施例中使用的原料来源如下:51.电子束负胶:美国microchem公司的ar n‑7520.07;52.pdms和固化剂‑道康宁184:深圳泰诺迪科技有限公司53.pmma胶:美国默克公司54.实施例155.本实施例提供一种纳米机器人的制备方法,包括如下步骤:56.(1)使用水、丙酮、异丙醇和水依次冲洗硅片,并用氮气吹干,保持硅片表面清洁;在处理后的硅片表面旋涂200nm厚的电子束负胶层,转速2000r/min,时间为60s,然后放到90℃热板上,烘干1min;将带有电子束负胶层的硅片样品放入电子束曝光机中,设置曝光剂量800uc/cm2,在掩模板下进行曝光;将曝光后的硅片样品放入电子束显影液中进行显影,显影时间40s;将显影后的硅片样品放在90℃热板上,烘干1min,得到第一微纳米机器人硬模板(模板图形为凸出的“l”形);57.(2)将步骤(1)得到的第一微纳米机器人硬模板放入三甲基氯硅烷溶液中,浸泡6小时;取出样品后用氮气吹干,放入培养皿中,加入质量比10:1的pdms和固化剂道康宁184的混合液,然后放入真空箱里抽真空2小时,再在85℃烘箱中放置8小时;从烘箱中取出样品,从培养皿边缘揭开固化后形成的pdms膜,倒模得到微纳米机器人软模板(模板图形为凹陷的“l”形);58.(3)在硅片上旋涂100nm厚的pmma胶层,转速3000r/min,时间60s,然后放在85℃热板上烘烤1min;将步骤(2)得到的微纳米机器人软模板和带有pmma胶层的硅片放入纳米压印机中,设置纳米压印温度为105℃,压力10kn,恒温加压,使流动的pmma胶填充微纳米机器人软模板空腔,降温后图形固化;将样品从纳米压印机中取出,用镊子揭开微纳米机器人软模板,得到第二微纳米机器人硬模板(模板图形为凸出的“l”形);59.(4)在步骤(3)得到的第二微纳米机器人硬模板上电子束蒸镀80nm厚的镍金属层和20nm厚的钛金属层,将蒸镀后的样品置于水中超声,收集超声之后的溶液,过滤得到纳米机器人。60.采用扫描电子显微镜(fei公司,型号:nova nanosem 450)对本实施例得到的纳米机器人进行表征,结果如图1所示,可以看出该纳米机器人为“l”形,长边1μm,短边0.3μm。61.实施例262.本实施例提供一种纳米机器人的制备方法,与实施例1的区别在于,模板图形为“c”形,步骤(4)中电子束蒸镀50nm厚的钴金属层和10nm厚的铂金属层。63.采用扫描电子显微镜对本实施例得到的纳米机器人进行表征,结果如图2所示,可以看出该纳米机器人为“c”形,圆环宽度0.3μm。64.实施例365.本实施例提供一种纳米机器人的制备方法,与实施例1的区别在于,模板图形为“∠”形,步骤(4)中电子束蒸镀130nm厚的四氧化三铁层和50nm厚的二氧化钛层。66.采用扫描电子显微镜对本实施例得到的纳米机器人进行表征,结果如图3所示,可以看出该纳米机器人为“∠”形,长边1μm,短边0.3μm。67.申请人声明,以上所述仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,所属技术领域的技术人员应该明了,任何属于本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,均落在本发明的保护范围和公开范围之内。
本文地址:https://www.jishuxx.com/zhuanli/20240726/122799.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。