在空转期间使风力涡轮机偏航的制作方法
- 国知局
- 2024-07-27 13:13:38
本发明涉及一种控制经受海浪的海上风力涡轮机以阻尼至少一个机械振动的方法和装置。此外,本发明涉及包括该装置并且被构造成执行该方法的海上风力涡轮机。
背景技术:
1、海上风力涡轮机经受海浪和风,海浪和风可能激发风力涡轮机的一个或多个部件的一个或多个机械振荡。特别地,较大的海上涡轮机支撑结构(例如单桩和塔架)在相当大的比例上(在很大程度上)可以由空转(空载,idling)(波浪所产生的)疲劳载荷驱动。对于空转疲劳载荷,系统(土壤、结构、空气动力学)的阻尼是极其重要的。风力涡轮机和/或支撑结构(例如平台或固定基座)所经受的疲劳载荷也可取决于例如支撑结构的高度和/或塔架的高度。
2、文献us2018/0347542al公开了一种用于在风力涡轮机的空转或停机状态期间经由偏离来风方向的偏航偏移来减小载荷的系统和方法。由此,监测风力涡轮机的转子叶片的故障,并且如果检测到故障,则确定风力涡轮机的操作状态。如果在预定的操作状态中,则机舱被主动偏航远离来风方向,直到故障被校正或清除和/或操作状态改变。
3、然而,已经观察到,常规方法和系统不是在所有情况下都实现对操作期间、特别是空转期间的机械振荡的充分阻尼。
4、因此,可能需要一种控制经受海浪的海上风力涡轮机以用于阻尼至少一个机械振动的方法和相应的装置,其中,可以减小作用于风力涡轮机部件和/或支撑结构上的载荷,并且其中,特别地,可以有效地阻尼机械振动。
技术实现思路
1、这种需要可以通过根据独立权利要求的主题来满足。本发明的有利实施例由从属权利要求描述。
2、根据本发明的实施例,提供了一种控制经受海浪的海上风力发电机以用于阻尼至少一个机械振动的方法,所述方法包括:将所述机舱偏航到基于关于海浪方向的信息导出的有利取向,以便改善对振动的阻尼。
3、该方法可以例如由风力涡轮机控制器或风力涡轮机控制器的单元或模块执行。海上风力涡轮机包括安装在风力涡轮机塔架顶部的机舱,风力涡轮机塔架安装在风力涡轮机支撑结构处。风力涡轮机支撑结构可以例如是浮动在海面上的浮动平台,或者可以包括固定在海底/海床的固定基座。
4、该方法可适于阻尼例如由包括转子叶片的机舱、风力涡轮机塔架和支撑结构组成的系统的至少一个机械振动。整个风力涡轮机系统可以由至少一个海浪激励成机械振动。该方法可用于阻尼风力涡轮机的一个或多个部件或一组或多组部件的一个或多个机械振动的一个或多个模式。
5、为了使机舱偏航,即,设定机舱的取向并由此设定连接多个转子叶片所在的转子的取向,机舱基本上围绕竖直取向的偏航轴线旋转或转动,该偏航轴线基本上与风力涡轮机塔架的纵向方向一致。
6、机舱的有利取向可以被认为是机舱的如下取向(或偏航角):在所述取向(或偏航角)下,振动被有效阻尼,特别是对于当前操作条件(特别地包括海浪方向)被阻尼到最大程度。
7、海浪方向可对应于风力涡轮机所经受的或支撑风力涡轮机的支撑结构所经受的最大或主波浪的方向。海浪方向可以被限定为海浪的波前(波阵面)的传播方向。根据本发明的实施例,海浪方向不必确定为实际值,而是可以先前已经确定为例如长期(平均或均值)预期或观察的海浪方向,这可以取决于风力涡轮机或支撑结构所处的位置和/或可以取决于年度季节。在其它实施例中,例如使用测量结果可确定海浪方向,作为风力涡轮机所经受的实际占主导的海浪方向。
8、根据本发明的实施例,有利取向可以是预定有利取向,然而,该预定有利取向可以取决于风力涡轮机的位置和/或例如年度季节和/或甚至取决于当地天气条件或天气预报。
9、因此,关于海浪方向的信息可源自安装在风力涡轮机处的一个或多个传感器的一个或多个测量值。在其它实施例中,关于海浪方向的信息可从电子存储器或例如查找表获得,在电子存储器或例如查找表中存储预期或长期海浪方向,或者直接存储机舱的预定有利取向,然而,该预定有利取向可先前关于长期或预期海浪方向被确定。
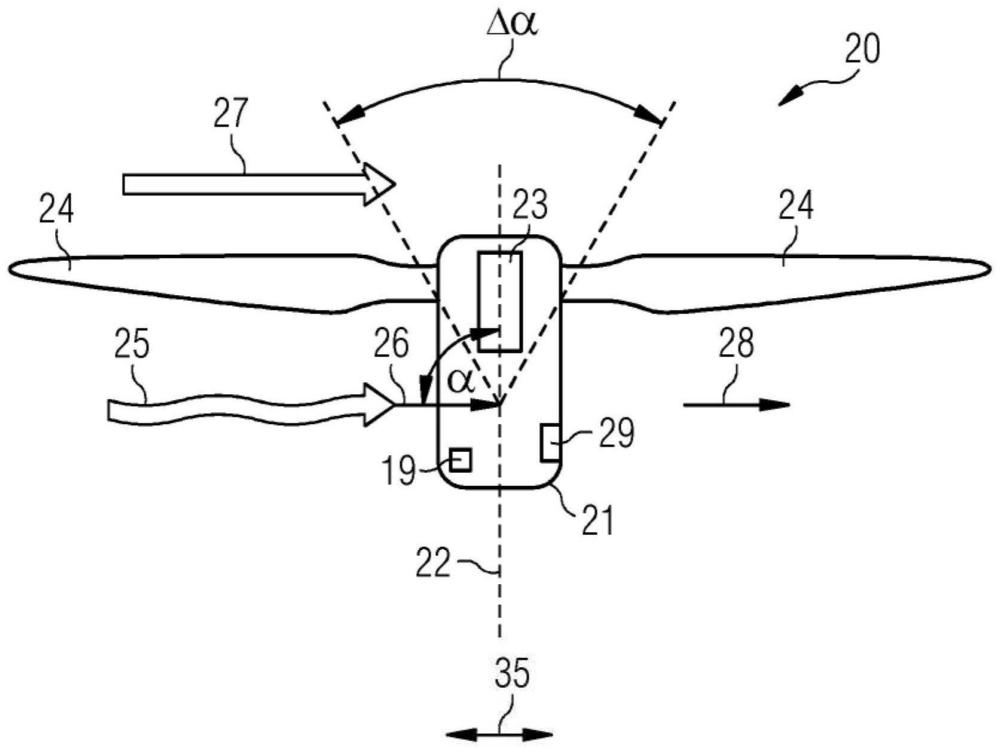
10、根据本发明的一个实施例,有利取向可对应于机舱的如下取向,在该取向中,转子轴线和海浪方向包括大致在60°和120°之间、特别地是大致90°的角度。
11、考虑到海浪方向,机舱的有利取向可以从至少包括机舱、风力涡轮机塔架和/或风力涡轮机支撑结构的机械系统的模拟来确定。当考虑海浪方向以获得有利取向时,与传统的现有技术相比,可以改善振动的阻尼。
12、根据本发明的实施例,进一步基于关于主(特别是疲劳)加载方向的信息来导出有利取向。
13、主加载方向可以是预先已知或预先确定的主加载方向,其可以是根据长期测量或估计和/或模拟先前已经确定的,特别是基于环境条件(风和/或波浪)确定的。在其它实施例中,主加载方向可对应于实际主加载方向,其可例如使用安装在风力涡轮机系统的不同位置处的一个或多个传感器使用一个或多个测量结果来确定。
14、根据本发明的实施例,主加载方向可表示“长期主疲劳加载方向”,其表示预期或观察到最高疲劳载荷所在的部分或方向。
15、根据本发明的实施例,主加载方向可意味着“瞬时/短期主(疲劳)加载方向”;这将是例如在涡轮机上测量的在较短的时间范围内的最大加载的载荷方向。
16、根据本发明的实施例,主加载方向可基本上等同于海浪方向,或者可仅从海浪方向偏离不多,或者可从海浪方向偏离小于30°或20°或10°的角度。根据其它实施例,主加载方向可以是可从海浪方向和风向导出的。根据本发明的其它实施例,海浪方向可从主加载方向确定,其可为可访问的或可从传感器的一个或多个测量结果导出,传感器例如为加速度计、应变传感器等。
17、当还包括关于主加载方向的信息以用于导出有利取向时,关于实现改善的振动阻尼,仍可以改善有利取向。
18、根据本发明的实施例,该方法还包括:使用相对于海浪方向和/或主加载方向的预定角度范围来限定有利取向。
19、根据该实施例,当机舱被取向到预定角度范围内(例如,相对于海浪方向)时,实现了机舱的有利取向。由此,可以改善灵活性。此外,可以简化该方法。根据具体应用,特别是考虑风力涡轮机设计、风力涡轮机机械布局和/或海浪的幅度或振幅,可以调整预定角度范围。
20、根据本发明的实施例,有利取向可以不取决于风向,而可以仅取决于主海浪方向和/或主加载方向。
21、根据本发明的实施例,当转子的旋转轴线与海浪方向和/或主加载方向之间的角度在预定角度范围内时,机舱被设定成有利取向。
22、因此,可以简化该方法。在转子处,安装多个转子叶片。转子被容纳在机舱中并且旋转,以便驱动用于产生电能的发电机。然而,特别地,当转子静止不动或仅非常缓慢地旋转时,该方法可被应用在空转状态中。
23、有利取向不必相对于转子轴线限定,而是也可以相对于例如转子叶片旋转所在的转子平面限定。转子平面基本上垂直于转子轴线。根据相对于哪个方向(即,转子轴线或由转子平面限定的方向)来限定,可以调整预定角度范围。
24、根据本发明的实施例,预定角度范围跨越60°与120°之间,特别是80°与100°之间,或者前述范围的负值(当相对于转子轴线限定有利取向时)。
25、角度范围的精确跨度可以基于模拟包括机舱、塔架和支撑结构的机械系统的模拟来确定。最有利的取向可被认为是机舱的如下取向,其中机械振动的阻尼被最大化。最有利的取向可以例如对应于机舱的如下取向,其中转子轴线包括与主海浪方向成90°的角度。
26、根据本发明的实施例,海浪方向基于预定的长期的(特别是取决于季节和/或位置的)波浪方向和/或长期主加载方向。
27、例如,在长时间范围内,可能已经观察到并且监测了在风力涡轮机系统的安装地点处发生的海浪的方向。长期方向然后可以例如对应于在延长的时间范围内在观察到的波方向上平均的平均波方向。根据其它实施例,预定长期波浪方向可取决于季节,特别是年度季节,或者可取决于已知或预定的环境阶段,在所述环境阶段中,海浪方向具有特定特性。当海浪方向基于预定的长期波浪方向而定时,用于确定实际海浪方向的测量可能不是必需的,从而简化了所述方法。
28、根据本发明的实施例,主(特别是疲劳)加载方向基于预定的长期的(特别是取决于季节和/或位置的)主(特别是疲劳)加载方向。主疲劳载荷方向可以是如下罗盘方向,在该罗盘方向中,长期疲劳加载最高。例如,可以确定或计算几个罗盘方向的疲劳加载,并且可以设计用于与某个罗盘方向相关的最高疲劳载荷的支撑结构。
29、主加载方向可例如先前已经基于由例如安装在风力涡轮机处的传感器执行的先前载荷测量而确定。在其它实施例中,主加载方向可从例如预定长期波浪方向(潜在地还包括风向信息)导出。因此,在实际执行该方法期间,可能不需要另外的测量值。
30、根据本发明的实施例,海浪方向和/或主加载方向基于实际的海浪方向和/或实际的主加载方向而定。
31、实际海浪方向和/或实际主加载方向可以是在执行该方法时所实际存在的相应方向。当考虑相应的实际海浪方向和实际主加载方向时,由于实际海浪方向和/或实际主加载方向可能不是在所有情况下都等同于或对应于长期海浪方向或长期主加载方向,所以可以改进该方法。为了确定实际海浪方向和/或实际主加载方向,可能需要测量和/或处理步骤。
32、根据本发明的实施例,该方法还包括:使用至少一个传感器获得实际海浪方向和/或实际主加载方向,该至少一个传感器包括以下中的至少一者:至少一个加速度计;至少一个应变传感器;至少一个应变仪;至少一个其他载荷测量装置,其中所述传感器位于以下中的至少一者中或以下中的至少一者处:塔架顶部、塔架底部、机舱、风力涡轮机的任何其它部分。
33、一些或所有传感器可常规地安装在风力涡轮机系统处,特别是用于测量机械部件的应变和/或载荷。传感器可以例如适于确定风力涡轮机系统的一个或多个部分的应变和/或弯曲和/或加速度。相应的一个或多个传感器可适于特别地确定加速度和/或应变和/或载荷的方向,该方向可对应于实际海浪方向和/或实际主加载方向的方向。
34、来自传感器的测量信号可以被处理,并且特别是被组合,以便导出实际的海浪方向和/或实际的主加载方向。因此,特别地,可以考虑风力涡轮机的结构布局、预期振动模式以及操作状态。由此,可以精确地确定实际海浪方向和/或实际主加载方向。
35、根据本发明的实施例,波浪方向包括主加载方向和/或风向,或者基于主加载方向和/或风向来导出波浪方向。
36、波浪方向可能不能直接测量。然而,使用主加载方向以及在另外的实施例中还使用风向,可以使得能够确定波浪方向,特别是以精确的方式确定实际的海浪方向。
37、根据本发明的实施例,在风力涡轮机空转时执行该方法,空转包括以下至少一种:风力涡轮机不产生电力和/或不向电网输出电力;风力涡轮机与电网断开电连接;至少一个转子叶片被变桨以减小升力,尤其是最小化升力,进一步尤其是变桨到顺桨;变桨成使得有效弦与脱离转子平面的平面(out-of-rotorplane)对准;转子的旋转停止或可忽略,特别是小于标称旋转速度的5%;转子的主动速度控制是不可能的或者不被执行;施加或不施加转子轴制动;风力涡轮机处于在完成建造之后在电网连接之前的状态。
38、特别地,风力涡轮机可能不能收集风能,并且可能不能将风能转换成电能。已经观察到,在风力涡轮机的空转期间,发生相当大比例的疲劳载荷。因此,当在空转期间执行该方法时,可有效地减小风力涡轮机部件的疲劳载荷。
39、根据本发明的实施例,振动包括以下中的至少一者的振动:塔架;固定基座;浮动平台;支撑结构;单桩;塔架-基座系统;塔架-浮动平台系统;和/或所述海上风力涡轮机是固定基座风力涡轮机或浮动风力涡轮机,和/或所述方法进一步包括:获得风力涡轮机操作状态信息,其中,所述有利取向还基于所述风力涡轮机操作状态来导出。
40、因此,该方法可有效地阻尼多个风力涡轮机构件或部分的振动。固定基座可以包括单桩或多桩。所述浮动风力涡轮机可包括在海上浮动的平台,风力涡轮机塔架竖立在所述平台上。浮动平台可以使用多个绳索或线缆松散地连接到海底/海床上。由此,提供了灵活性。当也考虑风力涡轮机的操作状态信息以用于导出有利取向时,振动阻尼可以进一步增加。例如,也可以基于转子是完全停止还是缓慢旋转来导出有利取向。此外,有利取向可根据一个或多个转子叶片是否变桨到大约90°或变桨到其它桨距角而导出。有利取向可以例如从查找表中获得,该查找表包括用于包括不同波浪方向的多个操作条件的最高阻尼取向。
41、应当理解,关于控制经受海浪的海上风力涡轮机的方法描述、公开、应用或解释的特征(单独地或以任何组合的形式)也单独地或以任何组合地适用于根据本发明的实施例的用于控制经受海浪的海上风力涡轮机的对应装置,并且反之亦然。
42、根据本发明的实施例,提供了一种用于控制经受海浪的海上风力涡轮机以阻尼至少一个机械振动的装置,所述装置包括:处理器,其适于基于关于海浪方向的信息导出有利取向;致动器,其适于使所述机舱偏航至所述有利取向,以便改善对振动的阻尼。
43、该装置可以以软件和/或硬件实现,和/或可以是风力涡轮机控制器的一部分,或可以是例如风力涡轮机控制器的模块。该装置可以被构造成执行如以上多个实施例中描述的控制海上风力涡轮机的方法。
44、根据本发明的实施例,提供了一种海上风力涡轮机,包括:安装在支撑结构处的塔架;根据前述实施例的装置。
45、本发明的上述方面和其它方面从下文描述的实施例的示例中是显而易见的,并且参考实施例的示例进行解释。下面将参考实施例的示例更详细地描述本发明,但是本发明不限于所述实施例的示例。
本文地址:https://www.jishuxx.com/zhuanli/20240726/125473.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
燃气发动机的制作方法
下一篇
返回列表