带负载压气机的APU的引气控制方法与流程
- 国知局
- 2024-07-27 13:14:42
本发明涉及航空动力控制,特别地,涉及一种带负载压气机的apu的引气控制方法。
背景技术:
1、apu(apu)是一种小型的燃气涡轮发动机,主要用于为飞机主发动机的起动及环控系统提供引气,并可通过附件齿轮箱为飞机发电系统提供轴功率。当飞机在地面时,apu可替代笨重的气源车和电源车;在飞机起飞过程中,主发动机的功率可全部用于加速爬升,以改善飞机起飞性能;飞机着陆后,主发动机可及时关闭,以节省燃油和降低机场噪音。
2、目前apu的转速控制方式为apu起动后转速保持为定值。导叶控制方式为空载角度θ1(例如15°),环控引气模式θ2(例如80°),起动主发模式θ3(例如90°),θ1、θ2、θ3为定值,且θ1<θ2<θ3,在负载压气机的可控行程内,负载压气机导叶角度越大,引气能力越强,而apu的工作转速为保持100%转速的定值。
3、在环控引气模式时,飞机的空调包需求、高度条件不同,引气流量需求不同。当飞机需要的引气流量小时,apu引气出口压力增加,负载压气机效率变低,同时为了避免负载压气机喘振,ecu会控制防喘控制活门打开,避免喘振,最终引起apu功率的损失。而且在apu启动后,由于转子的转速为定值,当飞机发出环控指令时,无论飞机飞行高度为多少,环境温度为多少,其导叶角度都会打开至θ2,因为θ2能够保证apu各个状态的引气能力,但是,在大多数情况下,apu的引气能力大于环控系统的引气需求,多余的空气不会被环控系统有效利用,且由于引气出口压力高,空气流量低,负载压气机的工作效率不高,引起apu功率的损失。
技术实现思路
1、本发明提供了一种带负载压气机的apu的引气控制方法,以解决如何提高apu的工作效率以及降低apu的燃油消耗的技术问题。
2、根据本发明提供一种带负载压气机的apu的引气控制方法,包括以下步骤:
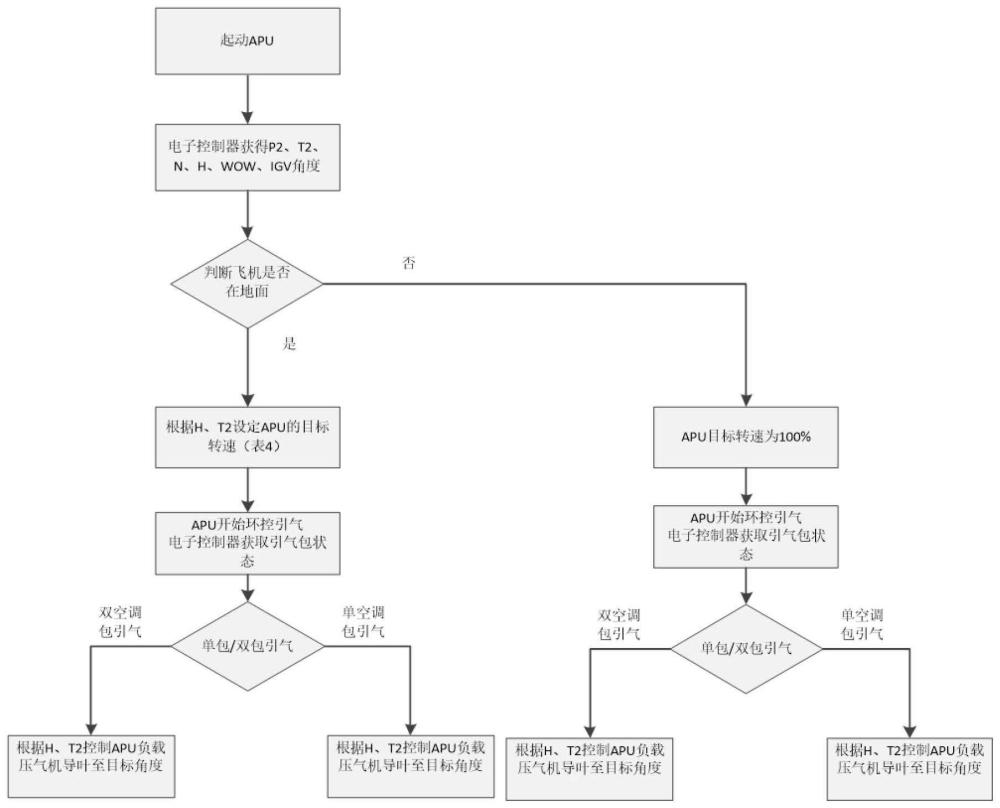
3、步骤s100:通过电子控制器获取进气压力p、进气温度t、空调包工作数量、飞行高度h以及轮载信号wow;
4、步骤s200:通过轮载信号wow判断飞机是否在地面工作,若飞机处于地面,则根据飞行高度h和进气温度t设定apu的不同比值的目标转速ncordem;若飞机脱离地面,则将apu的目标转速设置为100%;
5、步骤s300:获取空调包工作数量,当选择单空调包引气时,若飞机处于地面,则根据获取的目标转速ncordem1以及对应的第一飞行高度h1和第一进气温度t1,控制负载压气机导叶角度调节至第一目标角度igv1,以使apu的引气能力符合且贴近环控系统的引气需求;若飞机脱离地面,则将apu的目标转速设置为100%,并根据获取的对应的飞行高度h2和第二进气温度t2,控制负载压气机导叶角度调节至第二目标角度igv2,以使apu的引气能力符合且贴近环控系统的引气需求;
6、当选择双空调包引气时,若飞机处于地面,则根据获取的目标转速ncordem2,以及对应的第三飞行高度h2和第三进气温度t3,控制负载压气机导叶角度调节至第三目标角度igv3,以使apu的引气能力符合且贴近环控系统的引气需求;若飞机脱离地面,则将apu的目标转速设置为100%,并根据获取的对应的第四飞行高度h4和第四进气温度t4,控制负载压气机导叶角度调节至第四目标角度igv4,以使apu的引气能力符合且贴近环控系统的引气需求。
7、进一步地,所述步骤s200中,目标转速ncordem≥90%。
8、进一步地,通过电子控制器获取进气压力p、apu转速n、负载压气机导叶角度igv以及飞行速度ma,所述步骤s200中,获取目标转速ncor,包括以下步骤:
9、步骤s201,先根据测量的apu转速n以及对应的进气温度t,将负载压气机导叶角度igv调节至环控引气模式,获取apu换算转速ncor,其中,
10、
11、步骤s202,获取负载压气机的引气流量wa,计算负载压气机的换算流量wac,其中,
12、
13、步骤s203,根据标准大气特性获得大气压气p0,计算apu进气压力值p2cal,其中,
14、p2cal=p0×(1+0.2×ma2)3.5=f1(h,ma) (3)
15、步骤s204,结合飞机要求的负载压气机的引气压力pdem,结合式(3),可以获取的负载压气机压比要求πdem,其中,
16、
17、步骤s205,结合进气温度t、高度h、引气流量要求wadem,结合式(2)、(3),可以获得换算流量要求wacdem,即:
18、wacdem=f3(p2cal,t) (5)
19、步骤s206,绘制负载压气机导叶角度一定时,不同转速下的负载压气机的转速特性图,将不同的飞机高度h、不同的进气温度t通过式(4)和式(5)计算后得到的πdem、wacdem引入到负载压气机的转速特性图中分析,获取对应的换算转速目标值ncordem,其中,ncordem的获取方式为(πdem,wacdem)在负载压气机特性图中ncor曲线左侧,且保留一定的裕度,其裕度要求为:
20、
21、式中η为裕度;c为常数;πab为ncor为一定值时换算流量wacdem对应的压比;wacab为ncor为一定值时压比为πab对应的换算流量。
22、进一步地,所述步骤s300中,选择单空调包引气时,若飞机处于地面,则根据获取的目标转速ncordem1以及对应的第一飞行高度h1和第一进气温度t1,绘制目标转速ncordem1下,不同导叶角度下的负载压气机的第一角度特性图,并将第一飞行高度h1和第一进气温度t1通过式(4)和式(5)计算后得到的πdem1、wacdem1引入到负载压气机的第一角度特性图中分析,并通过式(6)获取对应的第一目标角度igv1,进而控制负载压气机导叶角度调节至第一目标角度igv1;若飞机脱离地面,则根据获取的目标转速100%时以及对应的第二飞行高度h2和第二进气温度t2,绘制目标转速100%下,不同导叶角度下的负载压气机的第二角度特性图,并将第二飞行高度h2和第二进气温度t2通过式(4)和式(5)计算后得到的πdem2、wacdem2引入到负载压气机的第一角度特性图中分析,并通过式(6)获取对应的第二目标角度igv2,进而控制负载压气机导叶角度调节至第二目标角度igv2。
23、进一步地,所述步骤s300中,选择双空调包引气时,若飞机处于地面,则根据获取的目标转速ncordem2以及对应的第三飞行高度h2和第三进气温度t3,绘制目标转速ncordem2下,不同导叶角度下的负载压气机的第三角度特性图,并将第三飞行高度h2和第三进气温度t3通过式(4)和式(5)计算后得到的πdem3、wacdem3引入到负载压气机的第一角度特性图中分析,并通过式(6)获取对应的第三目标角度igv3,进而控制负载压气机导叶角度调节至第三目标角度igv1;若飞机脱离地面,则根据获取的目标转速100%时以及对应的第四飞行高度h4和第四进气温度t4,绘制目标转速100%下,不同导叶角度下的负载压气机的第四角度特性图,并将第四飞行高度h4和第四进气温度t4通过式(4)和式(5)计算后得到的πdem4、wacdem4引入到负载压气机的第四角度特性图中分析,并通过式(6)获取对应的第四目标角度igv42,进而控制负载压气机导叶角度调节至第四目标角度igv4。
24、进一步地,所述步骤203中,若飞机脱离地面,计算apu进气压力值p2cal时,选择对应的飞行速度ma范围值的最小值。
25、进一步地,所述apu起动主发时,保持apu的转速为100%,且将负载压气机的导叶角度调节至启动主发模式。
26、进一步地,所述步骤s100中,当电子控制器无法获取轮载信号wow时,将apu转速n设置为100%,并将负载压气机导叶角度igv调节至环控引气模式。
27、进一步地,所述步骤s100中,当电子控制器无法获取进气温度t时,通过飞机航电通讯获取飞机采集的环境总温替换进气温度t。
28、进一步地,所述步骤s100中,当电子控制器无法获取飞行高度h时,通过飞机航电通讯获取飞机采集的环境总压换算飞行高度h。
29、本发明具有以下有益效果:
30、本发明的带负载压气机的apu的引气控制方法中,首先通过论载信号对飞机的工作状态进行判断,查看飞机是处于地面状态还是处于脱离地面的飞行状态,当飞机处于地面状态时,通过获取的飞机高度数据h和负载压气机进气温度t,计算出apu的目标转速ncordem,然后根据目标转速选取并控制调整至合适的负载压气机的导叶角度,当飞机处于脱离地面的飞行状态时,则直接将目标转速调整为100%,然后根据确定的目标转速选取并控制调整至合适的负载压气机的导叶角度。而现有的带负载压气机的apu的工作状态,无论飞机处于地面还是飞行状态,其转速均保持定值100%,且导叶角度也是固定值,以满足环控系统的所有状态引气需求,而飞机处于地面时,转子的低循环疲劳持续按100%转速消耗,浪费了转子的低循环疲劳寿命;且导叶角度为固定值,使得apu的引气能力通常会大于环控系统的引气需求,浪费燃油,降低了apu的效率。相较于现有的apu,本技术的apu的引气过程中,在处于地面时,通过对目标转速调节,降低apu的工作转速,对应降低了apu限寿件的低循环疲劳寿命,同时无论是飞机处于地面还是飞行状态都对导叶角度进行调整,使得apu的引气能力符合且贴近环控系统的引气需求,以降低apu的燃油消耗。
31、具体实施时,当飞机处于地面状态时,当选择单空调包引气时,若飞机处于地面,则根据获取的目标转速ncordem1以及对应的第一飞行高度h1和第一进气温度t1,控制负载压气机导叶角度调节至第一目标角度igv1,以使apu的引气能力符合且贴近环控系统的引气需求;当选择双空调包引气时,若飞机处于地面,则根据获取的目标转速ncordem2,以及对应的第三飞行高度h2和第三进气温度t3,控制负载压气机导叶角度调节至第三目标角度igv3,以使apu的引气能力符合且贴近环控系统的引气需求。当飞机处于脱离地面的飞行状态时,当选择单空调包引气时,则将apu的目标转速设置为100%,并根据获取的对应的飞行高度h2和第二进气温度t2,控制负载压气机导叶角度调节至第二目标角度igv2,以使apu的引气能力符合且贴近环控系统的引气需求;当选择双空调包引气时,则将apu的目标转速设置为100%,并根据获取的对应的第四飞行高度h4和第四进气温度t4,控制负载压气机导叶角度调节至第四目标角度igv4,以使apu的引气能力符合且贴近环控系统的引气需求。在实际工作时,大功率起发电机经apu转子传动驱动,在apu转速低于90%时,起发电机效率降低,apu转速不应低于90%。
32、综上,本技术通过设置带负载压气机的apu变转速变导叶角度控制逻辑架构,对apu的转速和负载压气机导叶角度进行适应性调整,在处于地面时,通过对目标转速调节,降低apu的工作转速,对应降低了apu限寿件的低循环疲劳寿命,同时无论是飞机处于地面还是飞行状态都对导叶角度进行调整,使得apu的引气能力符合且贴近环控系统的引气需求,以降低apu的燃油消耗。
33、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
本文地址:https://www.jishuxx.com/zhuanli/20240726/125550.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。