一种海上漂浮式风电机组的控制方法、系统、设备及介质与流程
- 国知局
- 2024-07-27 13:25:21
本发明属于自动控制,涉及一种海上漂浮式风电机组的控制方法、系统、设备及介质。
背景技术:
1、在过去几十年内,随着传统能源逐渐枯竭,人们开始越来越关注可再生能源,尤其是风能。这种能源在环保方面有着重要优势,能够减少对环境的污染,有效降低二氧化碳等温室气体的排放量。风能凭借其卓越的性能,与全球气候改善的追求相契合,因此在过去几十年里,风能得到了广泛推广和不断发展,其技术也日益成熟。海上风电作为风能的重要组成部分,在技术和政策的双重支持下,迅速取得了显著进展,极大地推动了全球风能的开发步伐。值得注意的是,海上风电因其丰富的风力资源和稳定的风源特点,正在全球范围内崭露头角,逐渐成为风能领域的新兴趋势。其独特之处在于海上风速更高,风的垂直变化较小,湍流程度相对较低,风向更为稳定,从而保障了较长的年利用小时数。此外,海上风电具备另一个显著优势,即不需要占用大量土地资源,而且地理位置接近沿海用电负荷中心,因此能够在就地消纳的方式下避免因远距离输电而造成的资源浪费问题。
2、当前,我国的海上风电场多采用固定式风机。然而,当水深超过50米时,现有的固定式风电基础已无法满足低成本规模化开发的需求。我国深远海域的风资源约为10亿千瓦,相当于近海风资源的两倍,蕴藏着巨大的开发潜力。随着海上风电开发逐渐从近海拓展至深远海,采用漂浮式风电技术成为不可避免的选择。
3、目前,漂浮式基础技术通常包括立柱式基础(spar)、半潜式基础(semi-submersible)、张力腿基础(tlp)和驳船式基础(barge)。在这些选择中,半潜式基础因其适用于50米以上水深、水线面较小等优势,成为目前最适合中国深远海风能开发的基础形式。然而,在深海区域,风力等级较高,可能导致半潜漂浮式风电装置的倾斜角度增大。这不仅会增加风电装置的结构受力,还会影响整个风机系统的稳定性和发电效率。
4、深海海域的海况复杂,存在复杂的风、浪、流等不同特性的环境激励,极易导致漂浮式基础倾斜角度增加,不仅会增加上部结构的结构负荷,还会影响结构整体的稳定性和发电效率。已有诸多研究表明,在漂浮式基础上采用各种减摇装置可减小浮体的横摇运动。可直接减小扰动力或力矩是减少横摇的一种手段。施加一个与扰动力矩相位相反的稳定力矩,从而使扰动力矩减小。装有减摇装置的漂浮式基础不至于因横摇剧烈而偏离原位,可使海上能源可靠并在经济上可行。
5、在深海区域,风力等级较高,可能导致半潜漂浮式风电装置的倾斜角度增大。这不仅会增加风电装置的结构受力,还会影响整个风机系统的稳定性和发电效率。
技术实现思路
1、本发明的目的在于克服上述现有技术的缺点,提供了一种海上漂浮式风电机组的控制方法、系统、设备及介质,该方法、系统、设备及介质能够调节漂浮式基础的倾角。
2、为达到上述目的,本发明采用如下技术方案:
3、本发明一方面,本发明提供了一种海上漂浮式风电机组的控制方法,包括:
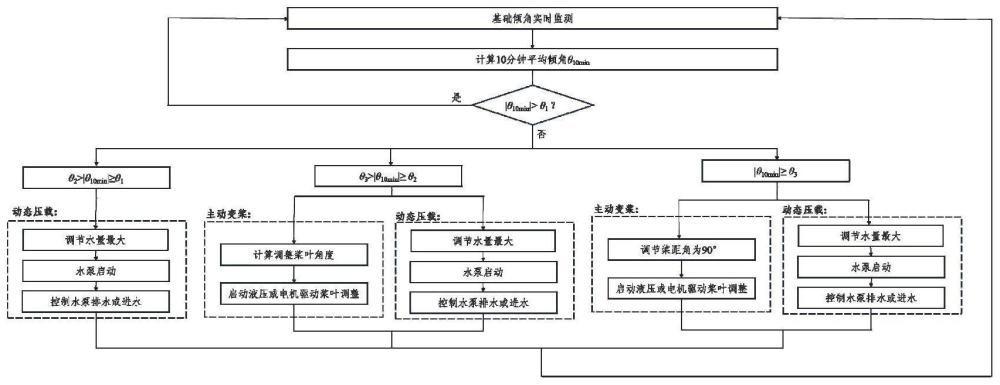
4、获取预设时间段内漂浮式基础的平均倾角θ10min;
5、根据所述漂浮式基础的平均倾角θ10min确定对应的控制策略,再根据确定得到的控制策略控制漂浮式基础的倾角,所述控制策略包括动态压载调节以及变桨控制。
6、本发明所述海上漂浮式风电机组的控制方法进一步的改进在于:
7、当θ1>|θ10min|,则说明漂浮式基础处于安全范围内,无需启动控制进行调节,其中,θ1为漂浮式基础倾角的安全阈值。
8、当θ2>|θ10min|≥θ1时,则启动动态压载控制,使漂浮式基础回到安全范围内,其中,θ1为漂浮式基础倾角的安全阈值,θ2为动态压载能调节的最大角度。
9、当θ3>|θ10min|≥θ2时,则先将动态压载调节到最大,并计算所需调整桨叶的角度,通过动态压载调节以及变桨控制共同调节,使漂浮式基础的倾角回到安全范围内,其中,θ2为动态压载能调节的最大角度,θ3为漂浮式基础的极限倾角。
10、当|θ10min|≥θ3时,则将变桨控制的桨距角调至90°,并且动态压载调节按照最大水量调节,最大限度的减小漂浮式基础的倾角。
11、本发明二方面,本发明提供了一种海上漂浮式风电机组的控制系统,包括:
12、获取模块,用于获取预设时间段内漂浮式基础的平均倾角θ10min;
13、控制模块,用于根据所述漂浮式基础的平均倾角θ10min确定对应的控制策略,再根据确定得到的控制策略控制漂浮式基础的倾角,所述控制策略包括动态压载调节以及变桨控制。
14、本发明所述海上漂浮式风电机组的控制系统进一步的改进在于:
15、当θ1>|θ10min|,则说明漂浮式基础处于安全范围内,无需启动控制进行调节,其中,θ1为漂浮式基础倾角的安全阈值。
16、当θ2>|θ10min|≥θ1时,则启动动态压载控制,使漂浮式基础回到安全范围内,其中,θ1为漂浮式基础倾角的安全阈值,θ2为动态压载能调节的最大角度;
17、当θ3>|θ10min|≥θ2时,则先将动态压载调节到最大,并计算所需调整桨叶的角度,通过动态压载调节以及变桨控制共同调节,使漂浮式基础的倾角回到安全范围内,其中,θ3为漂浮式基础的极限倾角;
18、当|θ10min|≥θ3时,则将变桨控制的桨距角调至90°,并且动态压载调节按照最大水量调节,最大限度的减小漂浮式基础的倾角。
19、本发明三方面,本发明提供了一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现所述海上漂浮式风电机组的控制方法的步骤。
20、本发明四方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现所述海上漂浮式风电机组的控制方法的步骤。
21、本发明具有以下有益效果:
22、本发明所述的海上漂浮式风电机组的控制方法、系统、设备及介质在具体操作时,根据所述漂浮式基础的平均倾角θ10min选择动态压载调节和/或变桨控制来控制调节漂浮式基础的倾角,实现漂浮式基础的稳定、高效控制,操作简单,方便,实用性极强。另外,需要说明的是,本发明采用动态压载调节和/或变桨控制,可以有效降低基础及上部结构的动态响应,保证海上漂浮式风电机组的运行稳定性。
技术特征:1.一种海上漂浮式风电机组的控制方法,其特征在于,包括:
2.根据权利要求1所述的海上漂浮式风电机组的控制方法,其特征在于,当θ1>|θ10min|,则说明漂浮式基础处于安全范围内,无需启动控制进行调节,其中,θ1为漂浮式基础倾角的安全阈值。
3.根据权利要求1所述的海上漂浮式风电机组的控制方法,其特征在于,当θ2>|θ10min|≥θ1时,则启动动态压载控制,使漂浮式基础回到安全范围内,其中,θ1为漂浮式基础倾角的安全阈值,θ2为动态压载能调节的最大角度。
4.根据权利要求1所述的海上漂浮式风电机组的控制方法,其特征在于,当θ3>|θ10min|≥θ2时,则先将动态压载调节到最大,并计算所需调整桨叶的角度,通过动态压载调节以及变桨控制共同调节,使漂浮式基础的倾角回到安全范围内,其中,θ2为动态压载能调节的最大角度,θ3为漂浮式基础的极限倾角。
5.根据权利要求1所述的海上漂浮式风电机组的控制方法,其特征在于,当|θ10min|≥θ3时,则将变桨控制的桨距角调至90°,并且动态压载调节按照最大水量调节,最大限度的减小漂浮式基础的倾角。
6.一种海上漂浮式风电机组的控制系统,其特征在于,包括:
7.根据权利要求6所述的海上漂浮式风电机组的控制系统,其特征在于,当θ1>|θ10min|,则说明漂浮式基础处于安全范围内,无需启动控制进行调节,其中,θ1为漂浮式基础倾角的安全阈值。
8.根据权利要求6所述的海上漂浮式风电机组的控制系统,其特征在于,当θ2>|θ10min|≥θ1时,则启动动态压载控制,使漂浮式基础回到安全范围内,其中,θ1为漂浮式基础倾角的安全阈值,θ2为动态压载能调节的最大角度;
9.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-5任一项所述海上漂浮式风电机组的控制方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-5任一项所述海上漂浮式风电机组的控制方法的步骤。
技术总结本发明公开了一种海上漂浮式风电机组的控制方法、系统、设备及介质,包括:获取预设时间段内漂浮式基础的平均倾角θ<subgt;10min</subgt;;根据所述漂浮式基础的平均倾角θ<subgt;10min</subgt;确定对应的控制策略,再根据确定得到的控制策略控制漂浮式基础的倾角,所述控制策略包括动态压载调节以及变桨控制,该方法、系统、设备及介质能够实现海上漂浮式风电机组的漂浮式基础的倾角控制。技术研发人员:温栋斌,李卫东,刘鑫,闫姝,周昳鸣,雷宇,胡合文受保护的技术使用者:中国华能集团清洁能源技术研究院有限公司技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240726/126073.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。