一种多变换形态的风电叶片运维攀爬机器人
- 国知局
- 2024-07-27 13:29:16
本发明涉及风力发电运维设备,尤其是涉及一种多变换形态的风电叶片运维攀爬机器人。
背景技术:
1、风电叶片是风力发电装置的核心部件,其故障是风电机组最常见的故障之一,为降低停机成本,避免因叶片损伤而造成风电事故,定期对叶片维护是非常有必要的。国内对安装后的叶片最普遍的维护方式为:人工依靠移动式起重机、吊篮等高空作业进行维护,随着技术的发展,近几年出现了应变、振动、噪声、数据融合等实时监测技术,红外热成像、机器视觉等非实时损伤检测技术。也有部分专利设计出自动化设备旨在提高叶片检测的效率,保证安全作业,例如,专利申请号为cn202310832509.1的专利公开了一种用于风电叶片检测的爬壁机器人,采用较为小巧的六足爬壁机器人结构,但其没有防坠安全保护装置,并且搭载能力有限,从地面到叶片这一过程需要人工参与。专利申请号为cn202311297207.5的专利基于超声和图像识别的无人机风电叶片检测装置,测风电叶片表面细微裂纹,探测风电叶片内部的缺陷及材料劳损,但由于无人机无法近距离接触叶片,其不能完成修复的工作。
2、因此亟需设计一款能实现从地面到叶片表面全过程机器完成、适应叶片全地形快速移动,且负载能力强,能搭载检测和各种运维工具的风电叶片运维机器人。
技术实现思路
1、本发明的目的是提供一种多变换形态的风电叶片运维攀爬机器人,多变换形态使机器人通过变换形态在叶片表面全地形快速移动,通过爬绳装置上升到叶片表面,避免人工搬运和使用大型吊车,代替传统人工高空维护模式,避免高空作业风险,有效降低运维成本。
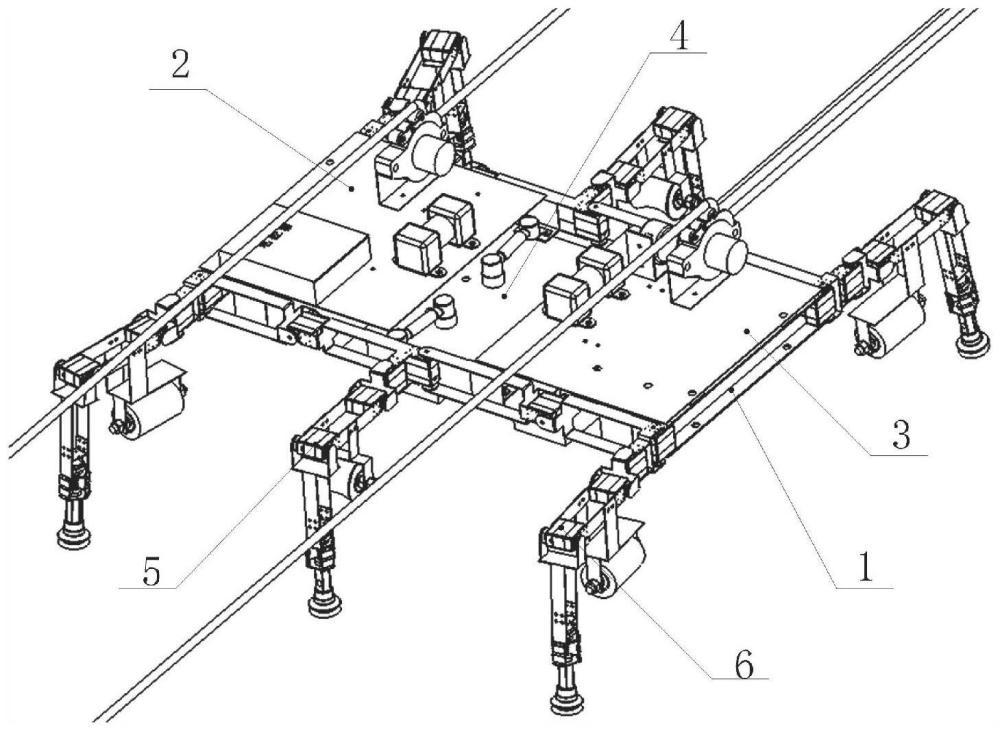
2、为实现上述目的,本发明提供了一种多变换形态的风电叶片运维攀爬机器人,包括躯干,所述躯干左侧上方设有左载物台,所述躯干右侧上方设有右载物台,所述左载物台和所述右载物台上均设有爬绳装置,所述左载物台和所述右载物台之间设有中间载物台,所述躯干上设有承重腿和夹紧腿。
3、优选的,所述躯干包括两个侧边连接板,两个所述侧边连接板两侧均设有左摆动躯干,所述左摆动躯干一端与一个所述侧边连接板连接,其另一端与左中躯干连接,所述左中躯干与右中躯干连接,所述右中躯干与右摆动躯干连接,所述右摆动躯干与另一个所述侧边连接板连接,所述左中躯干和所述右中躯干之间均设有舵机。
4、优选的,所述左载物台包括左载物板,所述左载物板顶部设有l型安装板,所述l型安装板竖直端上设有爬绳装置,所述爬绳装置前方设有电控箱,所述爬绳装置和所述电控箱中间一侧设有真空泵,所述左载物台底部设有两个拉杆球头座,两个所述拉杆球头座上均设有拉杆,所述拉杆末端均设有拉杆球头垫板。
5、优选的,所述右载物台包括右载物板,所述右载物板顶部设有所述l型安装板,所述l型安装板竖直端上设有所述爬绳装置,所述爬绳装置前方一侧设有所述真空泵,所述爬绳装置一侧固定安装有角铁安装板,所述角铁安装板上固定安装有电鼓卷线盘,所述右载物板底部设有两个所述拉杆球头座,两个所述拉杆球头座上均设有所述拉杆,所述拉杆末端均设有所述拉杆球头垫板。
6、优选的,所述中间载物台包括中间载物板,所述中间载物板顶部对称设置有四个所述拉杆球头座,四个所述拉杆球头座均与所述拉杆连接,所述拉杆末端设有所述拉杆球头垫板,所述中间载物板底部设有检测装置,所述检测装置一侧设有修复工具。
7、优选的,所述承重腿数量为两个,两个所述承重腿分别位于所述躯干的中间两侧,所述承重腿包括股节板,所述股节板两侧均设有舵机,一个所述舵机与基节连接,另一个所述舵机与胫节连接,所述胫节与支撑板连接,所述支撑板上设有压力传感器架,所述压力传感器架上设有压力传感器,所述压力传感器下方设有直线轴承顶板,所述直线轴承顶板下方设有直线轴承,所述直线轴承下方设有弹簧,所述弹簧外侧设有三合页连接件,所述弹簧下方与吸盘螺栓连接,所述吸盘螺栓与真空吸盘连接。
8、优选的,所述夹紧腿的数量为四个,四个所述夹紧腿分别位于所述躯干的四角处,所述夹紧腿的结构与所述承重腿的结构类似,其中所述承重腿的所述股节板上设有承重轮架,所述承重轮架上设有承重轮,所述夹紧腿的所述股节板上设有夹紧轮架,所述夹紧轮架上设有夹紧轮。
9、优选的,所述左载物台和所述右载物台底部均设有载物台垫片,所述左载物台和所述右载物台均通过所述载物台垫片与所述侧边连接板连接,所述右载物板顶部的所述l型安装板、所述爬绳装置和所述真空泵的位置与所述左载物板顶部的所述l型安装板、所述爬绳装置和所述真空泵的位置对称,所述右载物板底部的两个所述拉杆球头座的位置与所述左载物板底部的两个所述拉杆球头座的位置对称。
10、优选的,所述舵机数量为十六个,两个所述侧边连接板的两侧均设有两个所述舵机,两个所述左摆动躯干和两个所述左中躯干之间以及两个所述右摆动躯干和两个所述右中躯干之间均设有一个舵机,两个所述左中躯干和两个所述右中躯干之间均设有两个所述舵机。
11、优选的,所述左载物板底部设置的两个所述拉杆球头垫板分别与两个所述左摆动躯干连接,所述右载物板底部设置的两个所述拉杆球头垫板分别与两个所述右摆动躯干连接,所述中间载物板顶部设置的四个所述拉杆球头垫板分别与两个所述左中躯干和两个所述右中躯干连接。
12、因此,本发明采用上述一种多变换形态的风电叶片运维攀爬机器人,具有以下有益效果:
13、1.多变换形态的风电叶片运维攀爬机器人,躯干的多关节通过舵机连接,躯干两端可在上下180°范围内主动摆动,协作腿部可翻越叶片前缘或后缘,并可抱在叶片前缘后缘上,躯干可在平面展开成六边形,方便转向和小范围快速调整位置,六条仿生腿的基节、股节、胫节由舵机连接,各关节可在180°范围内转动,各腿交替摆动,机器人可全向移动,躯干翻转180°也可配合六条腿完成各动作,适用于风电叶片全地形。
14、2.机器人上的两个爬绳装置,使从地面到叶片表面这一过程也可自动完成,避免了使用大型吊车和人工的直接参与,在叶片长度方向上移动时,可使用爬绳装置配合承重轮和夹紧轮快速移动,提高效率,机器人的六条腿的末端均有真空吸盘,配合爬绳装置,能有效保证机器人吸附在叶片表面,保障高空作业的安全性。
15、3.机器人上的左载物台一端固定连接在躯干上,通过两个拉杆作为悬臂载物台的悬空端支撑,右载物台与左载物台相似,中间载物台通过四个对称布置的拉杆与躯干连接,当躯干两端向上或向下弯折时,左载物台、右载物台与躯干同步弯折,中间载物台不受影响,当躯干变为六边形时,左、右载物台两根拉杆拉伸长度相同,使左、右载物台仍能保持居中状态,中间载物台四个拉杆拉伸长度相同,中间载物台保持居中,此载物台设计提高了机器人的负载能力。
16、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:1.一种多变换形态的风电叶片运维攀爬机器人,其特征在于:包括躯干,所述躯干左侧上方设有左载物台,所述躯干右侧上方设有右载物台,所述左载物台和所述右载物台上均设有爬绳装置,所述左载物台和所述右载物台之间设有中间载物台,所述躯干上设有承重腿和夹紧腿。
2.根据权利要求1所述的一种多变换形态的风电叶片运维攀爬机器人,其特征在于:所述躯干包括两个侧边连接板,两个所述侧边连接板两侧均设有左摆动躯干,所述左摆动躯干一端与一个所述侧边连接板连接,其另一端与左中躯干连接,所述左中躯干与右中躯干连接,所述右中躯干与右摆动躯干连接,所述右摆动躯干与另一个所述侧边连接板连接,所述左中躯干和所述右中躯干之间均设有舵机。
3.根据权利要求2所述的一种多变换形态的风电叶片运维攀爬机器人,其特征在于:所述左载物台包括左载物板,所述左载物板顶部设有l型安装板,所述l型安装板竖直端上设有爬绳装置,所述爬绳装置前方设有电控箱,所述爬绳装置和所述电控箱中间一侧设有真空泵,所述左载物台底部设有两个拉杆球头座,两个所述拉杆球头座上均设有拉杆,所述拉杆末端均设有拉杆球头垫板。
4.根据权利要求3所述的一种多变换形态的风电叶片运维攀爬机器人,其特征在于:所述右载物台包括右载物板,所述右载物板顶部设有所述l型安装板,所述l型安装板竖直端上设有所述爬绳装置,所述爬绳装置前方一侧设有所述真空泵,所述爬绳装置一侧固定安装有角铁安装板,所述角铁安装板上固定安装有电鼓卷线盘,所述右载物板底部设有两个所述拉杆球头座,两个所述拉杆球头座上均设有所述拉杆,所述拉杆末端均设有所述拉杆球头垫板。
5.根据权利要求4所述的一种多变换形态的风电叶片运维攀爬机器人,其特征在于:所述中间载物台包括中间载物板,所述中间载物板顶部对称设置有四个所述拉杆球头座,四个所述拉杆球头座均与所述拉杆连接,所述拉杆末端设有所述拉杆球头垫板,所述中间载物板底部设有检测装置,所述检测装置一侧设有修复工具。
6.根据权利要求2所述的一种多变换形态的风电叶片运维攀爬机器人,其特征在于:所述承重腿数量为两个,两个所述承重腿分别位于所述躯干的中间两侧,所述承重腿包括股节板,所述股节板两侧均设有舵机,一个所述舵机与基节连接,另一个所述舵机与胫节连接,所述胫节与支撑板连接,所述支撑板上设有压力传感器架,所述压力传感器架上设有压力传感器,所述压力传感器下方设有直线轴承顶板,所述直线轴承顶板下方设有直线轴承,所述直线轴承下方设有弹簧,所述弹簧外侧设有三合页连接件,所述弹簧下方与吸盘螺栓连接,所述吸盘螺栓与真空吸盘连接。
7.根据权利要求6所述的一种多变换形态的风电叶片运维攀爬机器人,其特征在于:所述夹紧腿的数量为四个,四个所述夹紧腿分别位于所述躯干的四角处,所述夹紧腿的结构与所述承重腿的结构类似,其中所述承重腿的所述股节板上设有承重轮架,所述承重轮架上设有承重轮,所述夹紧腿的所述股节板上设有夹紧轮架,所述夹紧轮架上设有夹紧轮。
8.根据权利要求3所述的一种多变换形态的风电叶片运维攀爬机器人,其特征在于:所述左载物台和所述右载物台底部均设有载物台垫片,所述左载物台和所述右载物台均通过所述载物台垫片与所述侧边连接板连接,所述右载物板顶部的所述l型安装板、所述爬绳装置和所述真空泵的位置与所述左载物板顶部的所述l型安装板、所述爬绳装置和所述真空泵的位置对称,所述右载物板底部的两个所述拉杆球头座的位置与所述左载物板底部的两个所述拉杆球头座的位置对称。
9.根据权利要求2所述的一种多变换形态的风电叶片运维攀爬机器人,其特征在于:所述舵机数量为十六个,两个所述侧边连接板的两侧均设有两个所述舵机,两个所述左摆动躯干和两个所述左中躯干之间以及两个所述右摆动躯干和两个所述右中躯干之间均设有一个舵机,两个所述左中躯干和两个所述右中躯干之间均设有两个所述舵机。
10.根据权利要求5所述的一种多变换形态的风电叶片运维攀爬机器人,其特征在于:所述左载物板底部设置的两个所述拉杆球头垫板分别与两个所述左摆动躯干连接,所述右载物板底部设置的两个所述拉杆球头垫板分别与两个所述右摆动躯干连接,所述中间载物板顶部设置的四个所述拉杆球头垫板分别与两个所述左中躯干和两个所述右中躯干连接。
技术总结本发明公开了一种多变换形态的风电叶片运维攀爬机器人,属于风力发电运维设备技术领域,包括躯干,所述躯干左侧上方设有左载物台,所述躯干右侧上方设有右载物台,所述左载物台和所述右载物台上均设有爬绳装置,所述左载物台和所述右载物台之间设有中间载物台,所述躯干上设有承重腿和夹紧腿。本发明采用上述的一种多变换形态的风电叶片运维攀爬机器人,多变换形态使机器人通过变换形态在叶片表面全地形快速移动,通过爬绳装置上升到叶片表面,避免人工搬运和使用大型吊车,代替传统人工高空维护模式,避免高空作业风险,有效降低运维成本。技术研发人员:史小华,邵明扬,王吉洋,梁然,李岗,李文聪受保护的技术使用者:燕山大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240726/126310.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表