深度调峰汽轮机基于应力和寿命的联合控制平台的制作方法
- 国知局
- 2024-07-27 13:55:31
本申请涉及汽轮机,尤其涉及一种深度调峰汽轮机基于应力和寿命的联合控制平台。
背景技术:
1、在构建以新能源为主体的新型电力系统的背景下,风能、太阳能等可再生能源快速发展。针对可再生能源发电存在间歇性、随机性和波动性等问题,要求电站汽轮机深度调峰和灵活运行并转变成为应急保障和灵活调节电源,为电力供应起到兜底保障作用。汽轮机的深度调峰、快速启动、快速负荷变化,导致汽轮机高温部件热应力增大与寿命缩短,影响汽轮机的使用寿命与安全性。
技术实现思路
1、本申请实施例提供一种深度调峰汽轮机基于应力和寿命的联合控制平台。
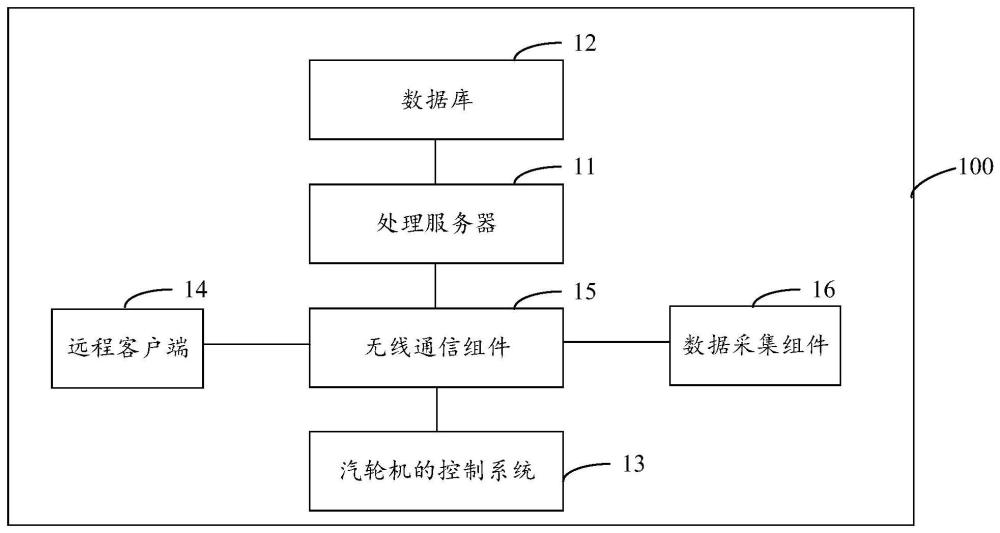
2、本申请第一方面实施例提出了一种深度调峰汽轮机基于应力和寿命的联合控制平台,包括:
3、处理服务器,用于获取监控指令,基于所述监控指令确定所述高温关键部件具体正负性的第一等效应力,并根据所述第一等效应力,确定所述高温关键部件的应力监控数据和第一类寿命监控数据,以及确定所述高温关键部件的第二类寿命监控数据,并根据所述高温关键部件的多类监控数据,生成闭环控制指令,其中所述闭环控制指令至少包括所述汽轮机的闭环控制参数的目标变化率;
4、汽轮机控制系统,用于根据所述闭环控制指令对所述汽轮机的闭环控制参数进行闭环控制。
5、本申请第二方面实施例提出了深度调峰汽轮机基于应力和寿命的联合控制方法,由处理服务器执行,该方法包括:
6、接收远程客户端发送的监控指令;
7、根据所述监控指令确定深度调峰汽轮机的高温关键部件具体正负性的第一等效应力,并根据所述第一等效应力,确定所述高温关键部件的应力监控数据和第一类寿命监控数据;
8、确定所述高温关键部件的第二类寿命监控数据,并根据所述高温关键部件的多类监控数据,生成所述汽轮机的闭环控制指令,其中所述闭环控制指令至少包括所述汽轮机的闭环控制参数的目标变化率;
9、向汽轮机控制系统发送所述闭环控制指令。
10、本申请第三方面实施例提出了深度调峰汽轮机的联合控制的分布式网络,该分布式网络,包括:多个处理服务器和调度服务器;
11、调度服务器,用于接收所述监控指令并从所述多个处理服务器中确定目标处理服务器,以及将所述监控指令发送给所述目标处理服务器;
12、所述目标处理服务器,用于接收所述监控指令,并基于所述监控指令确定深度调峰汽轮机的高温关键部件具体正负性的第一等效应力,并根据所述第一等效应力,确定所述高温关键部件的应力监控数据和第一类寿命监控数据,以及确定所述高温关键部件的第二类寿命监控数据,并根据所述高温关键部件的多类监控数据,生成闭环控制指令,其中所述闭环控制指令至少包括所述汽轮机的闭环控制参数的目标变化率,以及向汽轮机控制系统发送所述闭环控制指令。
13、本申请第四方面实施例提出了一种处理服务器,包括:
14、一个或多个处理器;
15、用于存储所述处理器可执行指令的存储器;
16、其中,所述处理器被配置为执行所述指令,以实现如本申请第二方面实施例提出的方法。
17、本申请第四方面实施例提出了一种非临时性计算机可读存储介质,当所述存储介质中的指令由处理服务器的处理器执行时,使得处理服务器能够执行本申请第二方面实施例提出的方法。
18、本申请第五方面实施例提出了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理服务器中的处理器执行时实现本申请第二方面实施例提出的方法。
19、本申请的实施例提供的技术方案至少带来以下有益效果:
20、对热应力和寿命进行监控,并根据监控数据,确定闭环控制参数的变化率,以根据变化率对闭环控制参数进行调整,也就是在汽轮机启动过程、停机过程或负荷变动过程中,对并网前与解列后汽轮机转速以及并网后与解列前汽轮机负荷进行闭环控制,既可以合理延长汽轮机的寿命,又可以提高汽轮机的灵活性和安全性,以实现深度调峰汽轮机的长寿命和灵活运行,进而使得深度调峰汽轮机尽可能达到设定的目标,如裂纹萌生日历寿命达到40年、裂纹萌生寿命累积损耗只有总寿命损耗的0.75(75%)、启动10000次、快速负荷变动20000次,每年启动250次、年均快速负荷变动500次,深度调峰最低安全稳定运行负荷为20%额定功率。
21、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:1.一种深度调峰汽轮机基于应力和寿命的联合控制平台,其特征在于,包括:
2.根据权利要求1所述的联合控制平台,其特征在于,所述应力监控数据包括所述高温关键部件的应力安全倍率和相对应力裕度;所述第一类寿命监控数据包括所述高温关键部件的瞬态低周疲劳裂纹萌生寿命损耗和低周疲劳裂纹萌生寿命累积损耗;第二类寿命监控数据为所述高温关键部件的裂纹萌生剩余日历寿命。
3.根据权利要求1所述的联合监控平台,其特征在于,所述处理服务器,还用于:
4.根据权利要求1所述的联合控制平台,其特征在于,所述联合控制平台还包括:
5.根据权利要求4所述的联合控制平台,其特征在于,所述数据库包括第一存储空间和第二存储空间,所述第一存储空间用于存储多类监控数据共享的第一基础数据集合,所述第二存储空间用于各类监控数据专属的第二基础数据集合。
6.根据权利要求5所述的联合控制平台,其特征在于,所述第二存储空间还包括值存储空间,每类监控数据对应有各自的子存储空间。
7.根据权利要求5所述的联合控制平台,其特征在于,所述处理服务器,还用于:
8.根据权利要求7所述的联合控制平台,其特征在于,所述处理服务器,还用于:
9.根据权利要求4所述的联合控制平台,其特征在于,还包括:数据采集组件,所述数据采集组件通过无线通信组件与所述处理服务器连接;
10.根据权利要求1-9中任一项所述的联合控制平台,其特征在于,所述处理服务器,还用于:
11.根据权利要求1-9中任一项所述的联合控制平台,其特征在于,所述处理服务器,还用于:
12.根据权利要求11所述的联合控制平台,其特征在于,还包括:远程客户端,所述远程客户端与所述处理服务器连接;
13.根据权利要求1-9中任一项所述的联合控制平台,其特征在于,所述汽轮机控制系统,还用于:
14.根据权利要求5所述的联合控制平台,其特征在于,所述闭环控制参数为所述汽轮机的转速,所述目标变化率为转速变化率,所述闭环控制参数为所述汽轮机的负荷,所述目标变化率为负荷变化率。
15.根据权利要求1-9中任一项所述的联合控制平台,其特征在于,所述汽轮机控制系统为汽轮机数字电液控制系统deh或汽轮机控制系统tcs的液压执行机构。
16.根据权利要求12所述的联合控制平台,其特征在于,所述远程客户端,还用于向所述处理服务器发送所述监控指令,以及接收所述处理服务器反馈的所述汽轮机的闭环控制结果。
17.根据权利要求1-9中任一项所述的联合控制平台,其特征在于,所述处理服务器,还用于:
18.根据权利要求17所述的联合控制平台,其特征在于,所述处理服务器,还用于:
19.一种深度调峰汽轮机基于应力和寿命的联合控制方法,其特征在于,由处理服务器执行,所述方法包括:
20.根据权利要求19所述的联合控制方法,其特征在于,所述应力监控数据包括所述高温关键部件的应力安全倍率和相对应力裕度;所述第一类寿命监控数据包括所述高温关键部件的瞬态低周疲劳裂纹萌生寿命损耗和低周疲劳裂纹萌生寿命累积损耗;第二类寿命监控数据为所述高温关键部件的裂纹萌生剩余日历寿命。
21.根据权利要求20所述的联合控制方法,其特征在于,所述根据所述监控指令确定深度调峰汽轮机的高温关键部件具体正负性的第一等效应力,包括:
22.根据权利要求19所述的联合控制方法,其特征在于,所述方法还包括:
23.根据权利要求22所述的联合控制方法,其特征在于,所述数据库包括第一存储空间和第二存储空间,所述第一存储空间用于存储多类监控数据共享的第一基础数据集合,所述第二存储空间用于各类监控数据专属的第二基础数据集合。
24.根据权利要求23所述的联合控制方法,其特征在于,所述方法还包括:
25.根据权利要求23所述的联合控制方法,其特征在于,所述方法还包括:
26.根据权利要求19-25中任一项所述的联合控制方法,其特征在于,所述方法还包括:
27.根据权利要求19-25中任一项所述的联合控制方法,其特征在于,所述方法还包括:
28.根据权利要求27所述的联合控制方法,其特征在于,所述方法还包括:
29.根据权利要求19-25中任一项所述的联合控制方法,其特征在于,所述闭环控制参数为所述汽轮机的转速,所述目标变化率为转速变化率,所述闭环控制参数为所述汽轮机的负荷,所述目标变化率为负荷变化率。
30.根据权利要求19-25中任一项所述的联合控制方法,其特征在于,所述方法还包括:
31.根据权利要求12所述的联合控制方法,其特征在于,所述方法还包括:
32.一种深度调峰汽轮机的联合控制的分布式网络,其特征在于,所述分布式网络包括:多个处理服务器和调度服务器;
33.根据权利要求32所述的分布式网络,其特征在于,所述调度服务器,还用于:
34.根据权利要求32所述的分布式网络,其特征在于,所述调度服务器,还用于:
35.根据权利要求32所述的分布式网络,其特征在于,还包括:第一客户端,所述第一客户端与所述调度服务器连接,用于向所述调度服务器发送所述监控指令。
36.根据权利要求32-35中任一项所述的分布式网络,其特征在于,还包括:第二客户端,每个所述处理服务器连接一个第二客户端,所述第二客户端用于接收所述处理服务器发送的所述汽轮机的闭环控制结果。
37.一种处理服务器,其特征在于,包括:
38.一种非临时性计算机可读存储介质,当所述存储介质中的指令由处理服务器中的处理器执行时,使得处理服务器能够执行如权利要求19至31中任一项所述的方法。
39.一种计算机程序产品,包括计算机程序,所述计算机程序在被处理服务器的处理器执行时实现如权利要求19至31中任一项所述的方法。
技术总结本申请提出一种深度调峰汽轮机基于应力和寿命的联合控制平台。该平台包括:处理服务器,用于获取监控指令,基于所述监控指令确定所述高温关键部件具体正负性的第一等效应力,并根据所述第一等效应力,确定所述高温关键部件的应力监控数据和第一类寿命监控数据,以及确定所述高温关键部件的第二类寿命监控数据,并根据所述高温关键部件的多类监控数据,确定所述汽轮机的闭环控制参数的目标变化率,根据所述目标变化率生成闭环控制指令;汽轮机控制系统,用于根据所述闭环控制指令对所述汽轮机的闭环控制参数进行闭环控制。本申请中基于监控指令进行应力和寿命相关数据的监控,以对汽轮机的转速和负荷进行调整,可以提高汽轮机的灵活性和安全性。技术研发人员:史进渊,李俊昆,张谊,黄庆华,张宏涛,方宇,谢岳生,江路毅,徐望人,王得谖,叶兴柱,祝海义,范小平,马立阁,张琳,王宇轩受保护的技术使用者:上海发电设备成套设计研究院有限责任公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240726/128199.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表