市政给排水系统中的智能监测系统及方法与流程
- 国知局
- 2024-07-30 12:21:07
本发明属于智能监测,特别涉及市政给排水系统中的智能监测系统及方法。
背景技术:
1、水是动植物生活的重要物资。为保证人们在工作和生活中能正常用水,在城市中建设了大量的管线用于供水和排水。大量的管线构成了市政给排水系统,使到市政供排水能正常运行。但在供排水过程中,由于水中含有颗粒杂质,导致管线在使用过程中会出现堵塞的情况,管线堵塞后会造成无法进行正常供排水。当管线出现堵塞后,需要排查管线的堵塞位置,再进行人工疏通。现有技术中管线堵塞位置的排查方法有很多种,其中包括钻孔法、敲打法、应力应变测试法等。这些方法都需要不断变换位置测试管线的变形程度或钻孔观察流体状态。这样测试会对管道本体造成损伤,且测试工作量大。基于此,提供市政给排水系统中的智能监测系统及方法,可通过实时监测管线中各段的水压差值,以初步判断管线的堵塞范围和程度,在堵塞范围内通过爬行机器人精确判断管道堵塞的精确位置,能在不损伤管线的前提下,快速检测到管线的堵塞位置。
技术实现思路
1、本发明提供市政给排水系统中的智能监测系统及方法,可通过实时监测管线中各段的水压差值,以初步判断管线的堵塞范围和程度,在堵塞范围内通过爬行机器人精确判断管道堵塞的精确位置,能在不损伤管线的前提下,快速检测到管线的堵塞位置。
2、本发明所采用的技术方案:
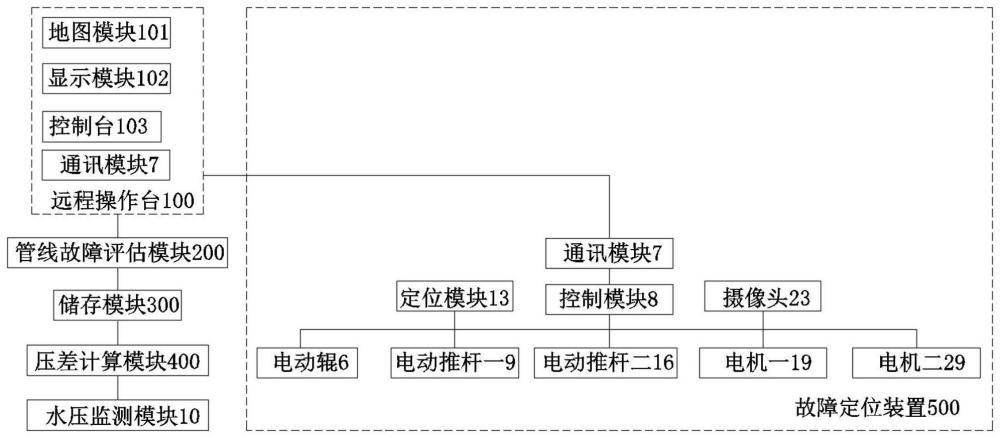
3、市政给排水系统中的智能监测系统,包括、
4、多个水压监测模块,多个水压监测模块分别间隔设于供水和排水的管线上,用于实时监测管线内的水压;
5、地图模块,用于将排水和供水的管线按等比例制成平面管线布置图;
6、远程监控台,包括显示模块和控制台,所述显示模块用于显示平面管线布置图;
7、压差计算模块,用于计算相邻所述水压监测模块监测到的压差值,其计算方法是将上游所述水压监测模块监测到的水压值减去其相邻下游的所述水压监测模块监测到的水压值,得到实时压差值和标准压差值,实时压差值是指管线中实时监测的压差值,标准压差值是指向管线中输入标准水压时监测的压差值;
8、储存模块,用于储存标准压差值;
9、管线故障评估模块,用于评估管线故障严重程度,当实时压差值为标准压差值的预设定百分比时,表示管线出现故障,在地图模块中突出显示出现故障的两个相邻所述水压监测模块间的管线;
10、故障定位装置,包括间隔设于管线上的多个阀壳,任一所述水压监测模块设于两个阀壳间,所述水压监测模块位于靠近阀壳的下游附近,所述阀壳外的顶部设有控制模块和通讯模块,所述阀壳内的顶部设有电动推杆一,所述电动推杆一连接有升降套,所述升降套内设有爬行机器人,所述爬行机器人内设有定位模块,所述爬行机器人前端设有摄像头,所述控制模块电连接于爬行机器人、定位模块,摄像头和通讯模块,所述通讯模块无线信号连接于显示模块和控制台,所述阀壳底部通过弹簧连接有底板,当所述电动推杆一带动升降套推动底板下降后,所述升降套与管线对齐。
11、进一步的,所述爬行机器人包括外壳,所述阀壳内的上部设有电动辊,所述电动辊上缠绕有电缆线,所述电缆线穿过升降套上侧壁连接于外壳,所述外壳侧壁上通过轮架设有多个轮毂电机,所述轮毂电机上设有外轮,所述外壳内的前侧壁上设有电机一,所述电机一的输出轴穿出外壳的外侧并设有螺旋杆,所述外壳内设有定位模块,所述定位模块、轮毂电机、电动辊和电机一均电连接于控制模块。
12、进一步的,所述外壳侧壁上设有电机二和转动套设有锥齿环,所述电机二的输出轴上设有锥齿轮,所述锥齿轮啮合于锥齿环,所述锥齿环上设有电动推杆二,所述电动推杆二连接有与管线内壁相匹配的堵水板,所述外壳的外壁上亦间隔设有多个摄像头,所述电动推杆二和电机二均电连接于控制模块。
13、进一步的,所述螺旋杆靠近前侧的摄像头位置处设有刷毛,当所述螺旋杆带动刷毛旋转时,所述刷毛能扫刷前侧的摄像头。
14、进一步的,所述升降套的上侧壁上设有避让口,所述避让口内转动设有导线轮,所述电缆线穿过避让口并绕在导线轮上。
15、进一步的,所述阀壳下部的相对侧壁上均设有通水口,所述管线连接于通水口。
16、进一步的,所述预设定百分比大于30%。
17、市政给排水系统中的智能监测方法,其特征在于:包括以下步骤,
18、s1、在管线上间隔测量水压;
19、s2、将管线按等比例制作管线平面布置图;
20、s3、计算相邻监测点监测到的压差值,其计算方法是将上游的监测点监测到的水压减去其相邻下游的监测点监测到的水压,得到实时压差值和标准压差值,实时压差值是指管线中实时监测的压差值,标准压差值是指向管线中输入标准水压时监测的压差值;
21、s4、储存标准压差值;
22、s5、评估管线故障严重程度,当实时压差值为标准压差值预设定百分比时,表示管线出现故障,在管线平面布置图中突出显示监测到实时压差值大的两个相邻的水压监测点间的管线,确定管线故障范围;
23、s6、启动爬行机器人在管线故障范围内爬行进行拍摄,通过拍摄内容确定堵塞点并发送定位信号,能确定堵塞位置和堵塞程度。
24、进一步的,该方法采用权利要求1-4中任一所述的市政给排水系统中的智能监测系统执行,且s6步骤中,还能通过摄像内容确认管线是否出现裂缝,对裂缝位置进行临时填补。
25、与现有技术相比,本发明的有益效果是:
26、1、通过在管线上间隔测量水压,将管线按等比例制作管线平面布置图,计算相邻监测点监测到的压差值,得到实时压差值和标准压差值,当实时压差值为标准压差值的预设定百分比时,表示管线出现故障,在地图模块中突出显示出现故障的两个相邻所述水压监测模块间的管线,能快速初步锁定管线故障范围。
27、2、启动爬行机器人在管线故障范围内爬行进行拍摄,通过拍摄内容能进一步确定堵塞点具体位置,在堵塞点具体位置发送定位信号,能确定堵塞位置和堵塞程度,本发明能在不损伤管线的前提下,快速检测到管线的堵塞位置。
技术特征:1.市政给排水系统中的智能监测系统,其特征在于:包括、
2.根据权利要求1所述的市政给排水系统中的智能监测系统,其特征在于:所述爬行机器人包括外壳,所述阀壳内的上部设有电动辊,所述电动辊上缠绕有电缆线,所述电缆线穿过升降套上侧壁连接于外壳,所述外壳侧壁上通过轮架设有多个轮毂电机,所述轮毂电机上设有外轮,所述外壳内的前侧壁上设有电机一,所述电机一的输出轴穿出外壳的外侧并设有螺旋杆,所述定位模块设于外壳内,所述轮毂电机、电动辊和电机一均电连接于控制模块。
3.根据权利要求2所述的市政给排水系统中的智能监测系统及方法,其特征在于:所述外壳侧壁上设有电机二和转动套设有锥齿环,所述电机二的输出轴上设有锥齿轮,所述锥齿轮啮合于锥齿环,所述锥齿环上设有电动推杆二,所述电动推杆二连接有与管线内壁相匹配的堵水板,所述外壳的外壁上亦间隔设有多个摄像头,所述电动推杆二和电机二均电连接于控制模块。
4.根据权利要求3所述的市政给排水系统中的智能监测系统,其特征在于:所述螺旋杆靠近前侧的摄像头位置处设有刷毛,当所述螺旋杆带动刷毛旋转时,所述刷毛能扫刷前侧的摄像头。
5.根据权利要求1-4中任一所述的市政给排水系统中的智能监测系统,其特征在于:所述升降套的上侧壁上设有避让口,所述避让口内转动设有导线轮,所述电缆线穿过避让口并绕在导线轮上。
6.根据权利要求1-4中任一所述的市政给排水系统中的智能监测系统,其特征在于:所述阀壳下部的相对侧壁上均设有通水口,所述管线连接于通水口。
7.根据权利要求1-4中任一所述的市政给排水系统中的智能监测系统,其特征在于:所述预设定百分比大于30%。
8.市政给排水系统中的智能监测方法,其特征在于:包括以下步骤,
9.根据权利要求8所述的市政给排水系统中的智能监测方法,其特征在于:该方法采用权利要求1-4中任一所述的市政给排水系统中的智能监测系统执行,且s6步骤中,还能通过摄像内容确认管线是否出现裂缝,对裂缝位置进行临时填补。
技术总结本发明涉及市政给排水系统中的智能监测系统及方法,包括以下步骤:S1、在管线上间隔测量水压;S2、按等比例制作管线平面布置图;S3、计算相邻监测点监测到的压差值,得到实时压差值和标准压差值;S4、储存标准压差值;S5、评估管线故障严重程度,确定管线故障范围;S6、启动爬行机器人在管线故障范围内爬行进行拍摄,通过拍摄内容确定堵塞点并发送定位信号,能确定堵塞位置和堵塞程度。本发明可通过实时监测管线中各段的水压差值,以初步判断管线的堵塞范围和程度,在堵塞范围内通过爬行机器人精确判断管道堵塞的精确位置,能在不损伤管线的前提下,快速检测到管线的堵塞位置。技术研发人员:黄文钊,余小明,杨玉湛,钟广根,谢仕伦受保护的技术使用者:中建冠城(广东)工程有限公司技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240729/160035.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表