一种桥梁敷设热力管道无人机及巡检方法及系统与流程
- 国知局
- 2024-07-30 09:22:30
本发明涉及热力管道的维护和巡检,具体为一种桥梁敷设热力管道无人机及巡检方法及系统。
背景技术:
1、桥梁热力管道巡检主要是对桥梁区域进行检查与巡视从而保证热力管道正常运转。而巡检的内容也很多,比如对桥梁的管道设备、旋转补偿器巡检,对桥梁热力管道区域的管道振动、管道位移等设备进行巡检。
2、桥梁热力管道巡检一般包括日常巡检、重点巡检和突发巡检。关于日常巡检,对桥梁1.6公里管道的表面、内部、连接点、疏水装置等部位的巡视,巡视过程中,工作人员不仅要经过川流不息的车辆,同时也要攀爬桥梁下的爬梯;不仅要对全线热力管道进行逐一查看,同时也要通过看、听等多种方式判断管道及附属设备是否处于健康水平,同时做好记录、分析、总结工作。
3、桥梁热力管道巡检地形与气候环境复杂,巡检人员成本高昂,同时,在大规模的巡检中,容易产生误判或漏判,具有很大的延时性和误差性。
4、在桥梁及热力管道的维护和巡检领域,传统方法大多依赖于人工视觉检查和定期的物理检测。随着技术的发展,无人机(unmanned aerial vehicles,uavs)因其灵活性高、覆盖范围广和成本效率高的优点被引入到各类基础设施的巡检工作中,尤其是在难以接近的区域或需要高频率监测的应用场景中表现出显著的优势。近年来,无人机技术与高精度传感器、机器学习和数据分析技术的融合,为基础设施的监测和维护带来了革命性的进步,使得早期缺陷识别和预防性维护策略的实施成为可能。
5、尽管如此,现有技术在实现对桥梁及热力管道全面、高效巡检方面仍存在一定不足。首先,现有技术中无人机的导航和路径规划往往未能充分考虑复杂地理环境下的信号干扰问题,导致在执行巡检任务时可能出现通信不稳定,甚至中断的情况,影响巡检数据的实时传输和处理效率。其次,对于巡检数据的分析处理多依赖于后期人工干预,缺乏实时、自动化的数据分析能力,使得对潜在风险的即时响应和处理受到限制。此外,现有解决方案在巡检策略的灵活性和自适应能力方面也有待提高,尤其是在面对环境变化和突发情况时,无法实时调整巡检计划以应对新的挑战。
技术实现思路
1、鉴于上述存在的问题,提出了本发明。
2、因此,本发明解决的技术问题是:现有的热力管道的维护和巡检方法存在巡检的安全性低,效率低,准确性低,以及桥梁和热力管道的维护管理水平低下的问题。
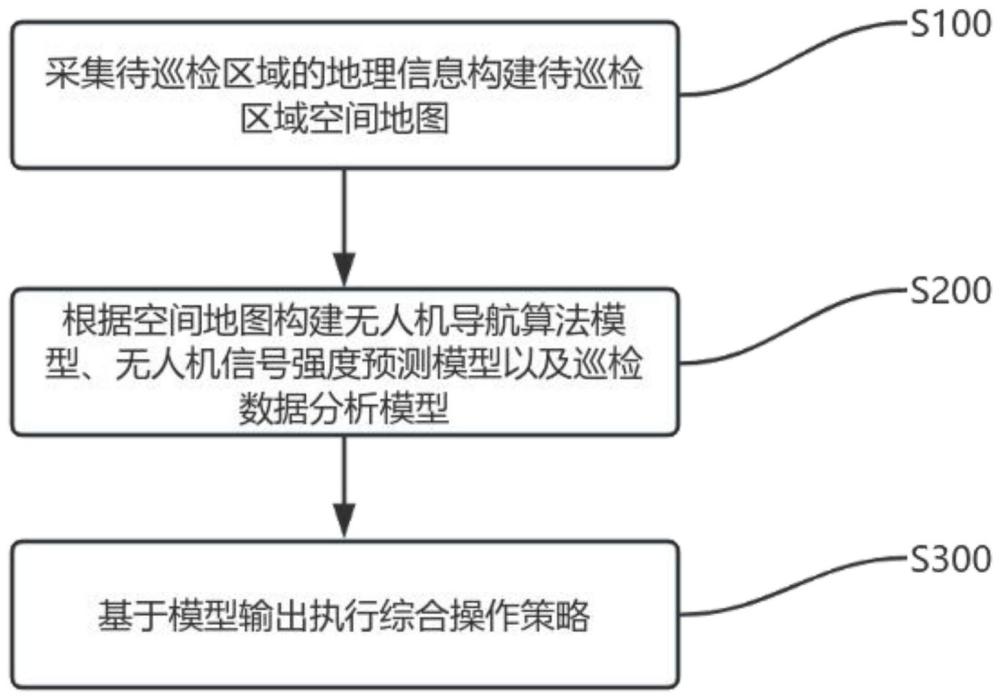
3、为解决上述技术问题,本发明提供如下技术方案:一种桥梁敷设热力管道无人机及巡检方法,包括采集待巡检区域的地理信息构建待巡检区域空间地图;根据空间地图构建无人机导航算法模型、无人机信号强度预测模型以及巡检数据分析模型;基于模型输出执行综合操作策略.
4、作为本发明所述的桥梁敷设热力管道无人机及巡检方法的一种优选方案,其中:所述采集待巡检区域的地理信息构建待巡检区域空间地图包括采集地形地貌数据、基础设施信息、环境条件、无线电信号环境以及动态变化信息;
5、所述地形地貌数据包括地面高度和坡度;
6、所述基础设施信息包括桥梁的位置、尺寸、类型以及管道位置、直径、材料类型、埋设深度;
7、所述环境条件包括风速、风向、温度、湿度、日照时间以及光照强度;
8、所述无线电信号环境包括信号强度分布和干扰源信息;
9、所述动态变化信息包括交通流量以及施工活动。
10、作为本发明所述的桥梁敷设热力管道无人机及巡检方法的一种优选方案,其中:所述采集待巡检区域的地理信息构建待巡检区域空间地图包括获取待巡检区域的地理信息,包括:
11、在平面地图上对待巡检区域进行选取,并提取地理信息;
12、对平面地图所在环境进行测绘得到地理信息;
13、对平面地图所在环境通过无人机扫描生成三维地理信息;
14、将在平面地图上提取的地理信息、测绘得到地理信息和三维地理信息综合得到最终的待巡检区域的地理信息。
15、作为本发明所述的桥梁敷设热力管道无人机及巡检方法的一种优选方案,其中:所述根据空间地图构建无人机导航算法模型、无人机信号强度预测模型以及巡检数据分析模型包括根据空间地图创建无人机导航数据库,基于无人机导航数据库获取巡检目标,根据巡检目标和无人机信息查找匹配的无人机用于执行任务,构建无人机导航算法模型,表示为:
16、
17、
18、
19、
20、
21、其中,xk表示在时刻k的无人机位置向量,n表示总的时间步长或路径点数量,m表示设计矩阵,用于调整不同维度间距离的权重,包含风险或代价因子,uk表示在时刻k的控制输入向量,包含所有控制动作,m表示控制输入的维度,uk,i表示控制输入向量的第i个元素,表示静态障碍物的集合,表示静态障碍物的位置,α表示正的缩放因子,控制函数的衰减速率,表示动态障碍物的集合,oj,k表示在时刻k第j个动态障碍物的预测位置,rsafe表示安全距离,jp表示路径长度代价,je表示能量消耗代价,jo表示静态障碍物避让代价,js表示路径平滑性代价,jd表示动态障碍物避让代价,j表示综合代价数学模型,表示无人机导航算法模型。
22、作为本发明所述的桥梁敷设热力管道无人机及巡检方法的一种优选方案,其中:所述根据空间地图构建无人机导航算法模型、无人机信号强度预测模型以及巡检数据分析模型包括根据所述空间地图块创建无人机信号强度数据库,构建无人机信号强度预测模型,表示为:
23、
24、
25、其中,pl(d0)表示在参考距离d0处的路径损耗,n表示环境相关的路径损耗指数,d表示无人机与接收点之间的实际距离,xσ表示代表环境造成的阴影效应的随机变量,为具有零均值的高斯分布变量,ai表示第i条多径效应路径的幅度系数,fi表示第i条路径的频率,c表示光速,φi表示第i条路径的相位偏移,n表示被考虑的多径效应路径总数,δh表示发射机和接收机的高度差,k表示与高度差相关的衰减系数,反映高度差对信号强度的影响大小。
26、作为本发明所述的桥梁敷设热力管道无人机及巡检方法的一种优选方案,其中:所述根据空间地图构建无人机导航算法模型、无人机信号强度预测模型以及巡检数据分析模型包括根据空间地图块创建无人机任务分配数据库,引入岭回归模型增加对非线性关系的捕捉能力,给定一组训练数据{(x1,y1),…,(xn,yn)},扩展特征向量xi到多项式空间,表示为:
27、
28、其中,φ(xi)表示特征向量xi到多项式空间的映射,xi是特征向量,yi是标签;
29、岭回归模型的预测模型表示为:
30、y=φ(x)tβ+∈
31、其中,y表示目标变量的预测值,β是模型参数,∈是误差项,表示预测值和真实值之间的偏差;
32、构建巡检数据分析模型,表示为:
33、
34、其中,l(β)表示岭回归的损失函数,用于模型训练过程中的优化,包含两部分,一部分是均方误差,量化模型预测与实际数据之间的差异,另一部分是正则化项,用于减少模型复杂度并防止过拟合,λ是正则化参数,控制正则化项的强度,是β的l2范数,是模型参数的平方和。
35、作为本发明所述的桥梁敷设热力管道无人机及巡检方法的一种优选方案,其中:所述基于模型输出执行综合操作策略包括基于无人机导航算法模型输出对飞行时间和预计能耗进行分类包括:
36、若飞行时间小于15分钟,表示巡检区域近且障碍物少;
37、若飞行时间大于等于15分钟,小于30分钟,表示巡检区域中距离,或存在一些飞行障碍;
38、若飞行时间大于等于30分钟,表示巡检区域远,或飞行路径中有多个障碍物需要绕行;
39、对于飞行时间大于等于30分钟路径,进行预先的飞行模拟,确保无人机的自主避障能力足够应对实际飞行中遇到的障碍;
40、若消耗电量小于20%电池容量,表示路径直接且效率高;
41、若消耗电量大于等于20%电池容量,小于40%电池容量,表示能耗水平为历史能耗水平;
42、若消耗电量大于等于40%电池容量,表示需要中途更换电池或考虑任务分段执行;
43、基于无人机信号强度预测模型输出对信号强度进行分类,包括:
44、若信号强度>-60dbm,表示通信质量高,无人机可发送实时数据;
45、若信号强度在-80dbm到-60dbm,表示通信可靠,数据传输速率有波动变化;
46、若信号强度在-100dbm到-80dbm,表示通信不稳定,需要数据压缩或降低传输频率;
47、若信号强度<-100dbm,表示无人机出现通信断连,应避免或采取备用通信方案;
48、当信号强度<-60dbm时,增加信号强度检测的频率,实时监控信号状态,并准备启用备用通信协议或调整飞行高度以改善信号条件;
49、基于巡检数据分析模型输出对巡检结果进行分类,包括:
50、若l(β)=0时,表示未发现明显的缺陷或损伤,无需立即采取行动;
51、若0<l(β)≤0.5,表示测到潜在的问题点,将在近期内安排检查;
52、若l(β)>0.5,表示发现明显的结构损伤或严重缺陷,立即采取维修或加固措施;
53、无人机巡检过程中,针对关键结构或已知易损部位,无人机降低飞行速度,使用高分辨率相机或传感器进行巡检,使用激光扫描或红外成像;
54、针对整体结构进行无人机预览检查巡检,识别结构与历史结构区别。
55、本发明的另外一个目的是提供一种桥梁敷设热力管道无人机及巡检系统,其能通过根据空间地图构建无人机导航算法模型、无人机信号强度预测模型以及巡检数据分析模型,解决了目前的热力管道的维护和巡检方法含有准确性低的问题。
56、作为本发明所述的桥梁敷设热力管道无人机及巡检系统的一种优选方案,其中:包括初始化模块,空间地图创建模块,无人机巡检支持模型构建模块,综合操作策略执行模块;所述初始化模块用于采集巡检区域的地理信息;所述空间地图创建模块用于构建无人机导航数据库、无人机信号强度数据库和无人机任务分配数据库;所述无人机巡检支持模型构建模块用于构建无人机导航算法模型、无人机信号强度预测模型以及巡检数据分析模型;所述综合操作策略执行模块用于对模型输出进行分类执行。
57、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序是实现桥梁敷设热力管道无人机及巡检方法的步骤。
58、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现桥梁敷设热力管道无人机及巡检方法的步骤。
59、本发明的有益效果:本发明提供的桥梁敷设热力管道无人机及巡检方法采集待巡检区域的地理信息构建待巡检区域空间地图,精确地构建出待巡检区域的详细空间地图,提高巡检的安全性和效率,根据空间地图构建无人机导航算法模型、无人机信号强度预测模型以及巡检数据分析模型,确保无人机在复杂环境中的稳定导航和有效通信,还能够对巡检过程中收集的数据进行快速、准确的分析处理,提升巡检工作的实时性和准确性。基于模型输出执行综合操作策略,确保巡检过程的高效性和安全性,对巡检结果的及时分析和分类处理,提高热力管道的维护管理水平。本发明在巡检的安全性、效率以及准确性方面都取得更加良好的效果。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149242.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。