基于红外和激光雷达的移动机器人自动回充方法、系统、介质、程序产品及主机与流程
- 国知局
- 2024-07-30 09:22:29
本申请涉及机器人及自动回充,特别是涉及基于红外和激光雷达的移动机器人自动回充方法、系统、介质、程序产品及主机。
背景技术:
1、当前的技术领域中,移动机器人的回充系统普遍采用红外光发射作为主要的定位手段。机器人通过感应发射的红外信号来估算自身在环境中的大致位置,并据此执行缓慢的对位操作。然而,这种依赖单一红外光对位的方法存在若干局限性:
2、1.红外对位的精度受限,导致定位误差相对较大,这使得机器人难以实现精确且可靠的对位。
3、2.依赖红外光对位要求机器人的结构设计必须具备极高的精度,通常需要达到毫米级别的精确度,这在设计和制造过程中增加了额外的复杂性和成本。
4、3.在实际应用中,机器人可能会因为各种外部因素(如环境干扰、信号遮挡等)而丢失红外信号,这会严重影响其回充效率和可靠性。
5、鉴于上述问题,现有技术的回充方案亟需改进,以提高移动机器人的定位精度、降低对结构精度的要求,并确保在各种环境下都能稳定地接收到定位信号,从而实现更加高效和可靠的回充过程。
技术实现思路
1、鉴于以上所述现有技术的缺点,本申请的目的在于提供基于红外和激光雷达的移动机器人自动回充方法、系统、介质、程序产品及主机,用于解决仅依赖红外信号进行回充所面临的精度受限、成本高、效率和可靠性不佳的技术问题。
2、为实现上述目的及其他相关目的,本申请的第一方面提供一种基于红外和激光雷达的移动机器人自动回充方法,应用于主机;所述方法包括:响应于回充指令进入回充模式,并判断地图上是否有充电基站;若地图上没有充电基站,则按照预设搜寻策略进行搜寻直至找到充电基站红外信号;若地图上有充电基站或按照预设搜寻策略找到充电基站红外信号,则导航至距离所述充电基站预设范围内的激光测距处;根据当前位姿并通过激光雷达计算出充电基站正前方的位置点,并导航至该位置点;到达充电基站正前方的位置点后原地旋转至少一周以基于红外信号和激光雷达信号双重确认主机确在充电基站的正前方;根据充电基站红外信号和激光雷达接收信息进行回充对位,并在向所述充电基站靠近的过程中根据实时距离值逐级减速;在抵达充电基站正前方的预设位置后停止移动并旋转至充电口对准所述充电基站的位姿,随后移动至所述充电基站中进行充电。
3、于本申请的第一方面的一些实施例中,所述搜寻策略包括如下:主机原地旋转至少一周以搜寻充电基站的红外信号;判断是否搜寻到充电基站的红外信号;若搜寻到充电基站的红外信号,则导航至距离所述充电基站预设范围内的激光测距处;否则,导航至地图上固定若干个位置点以搜寻充电基站的红外信号,并在导航至各个位置点后重复执行原地旋转至少一周以搜寻充电基站的红外信号,直至搜寻到充电基站的红外信号。
4、于本申请的第一方面的一些实施例中,所述基于红外信号和激光雷达信号双重确认主机确在充电基站的正前方,包括:若主机上的红外接收器接收到充电基站发射的红外信号,且主机上的激光雷达扫描到位于充电基站顶部的特征区域,则能双重确认主机位于充电基站的正前方。
5、于本申请的第一方面的一些实施例中,主机根据充电基站红外信号和激光雷达接收信息进行回充对位的过程包括:设于主机正前方的两个红外接收器实时接收设于充电基站正前方的两个红外发射器所发射的红外信号;若接收红外信号无误则表示主机与充电基站无偏移,否则表示有偏移;主机上的激光雷达实时识别充电基站顶部的特征区域;结合红外信号接收和激光雷达特征区域识别的信息,主机实时计算并调整主机的行进路线,以确保主机沿着正确的路径向充电基站移动。
6、于本申请的第一方面的一些实施例中,主机在回充对位后在向所述充电基站靠近的过程中根据实时距离值逐级减速,包括:设定第一距离阈值和第二距离阈值,且所述第一距离阈值大于所述第二距离阈值;当主机与充电基站之间的距离超过所述第一距离阈值时,主机按照恒定速度向充电基站靠近;当主机与充电基站之间的距离小于所述第一距离阈值时,主机按照距离与速度成线性比的关系降速行至充电基站,直至行进第二距离阈值。
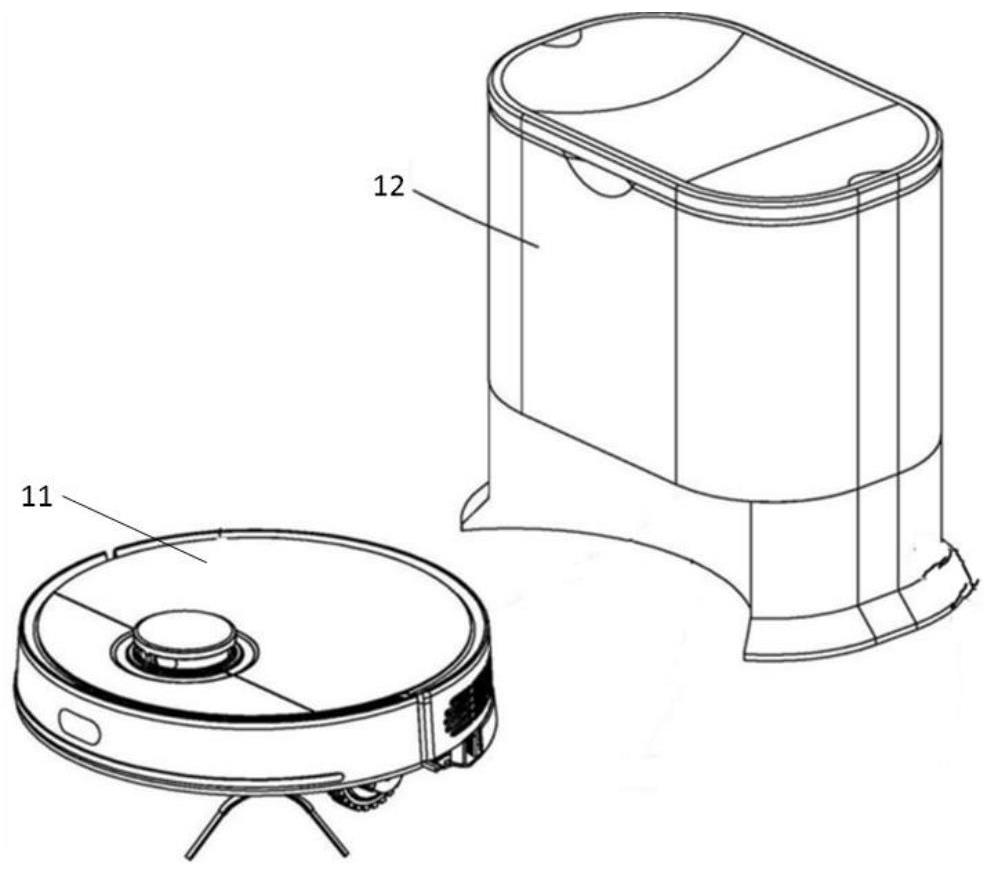
7、为实现上述目的及其他相关目的,本申请的第二方面提供一种基于红外和激光雷达的移动机器人自动回充系统,包括主机和充电基站;所述充电基站上设有发射信号全覆盖充电基站正前方的多个红外发射器,每个红外发射器有一定的发射角度和有效距离;所述充电基站上还设有反光或吸光的特征区域贴纸;所述主机上相应设有多个红外接收器,用于接收所述充电基站上的红外发射器所发射的红外信号;所述主机上还设有用于识别所述特征区域的激光雷达;所述主机中的控制系统用以执行所述基于红外和激光雷达的移动机器人自动回充方法。
8、于本申请的第二方面的一些实施例中,所述充电基座上共设有四个红外发射器,分别是左前方红外发射器、右前方红外发射器、正前方两个红外发射器;所述主机上设有相应的四个红外接收器,分别是左前方红外接收器、右前方红外接收器、正前方两个红外接收器;正前方两个红外接收器的间距大于正前方两个红外发射器的间距。
9、于本申请的第二方面的一些实施例中,所述充电基站对红外发射器的红外信号进行编码,以供主机根据接收到的编码信息及接收到该编码信息的红外接收器编号进行实时调整位姿,以使主机正前方的红外接收器接收所述编码信息。
10、为实现上述目的及其他相关目的,本申请的第三方面提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述基于红外和激光雷达的移动机器人自动回充方法。
11、为实现上述目的及其他相关目的,本申请的第四方面提供一种计算机程序产品,所述计算机程序产品中包括计算机程序代码,当所述计算机程序代码在计算机上运行时,使得所述计算机实现所述基于红外和激光雷达的移动机器人自动回充方法。
12、为实现上述目的及其他相关目的,本申请的第五方面提供一种机器人主机,包括存储器、处理器及存储在存储器上的计算机程序;所述处理器执行所述计算机程序以实现所述基于红外和激光雷达的移动机器人自动回充方法。
13、如上所述,本申请的基于红外和激光雷达的移动机器人自动回充方法、系统、介质、程序产品及主机,具有以下有益效果:本申请采用红外与激光雷达相结合的方式进行机器人自动回充,避免了仅使用红外对位导致的精度低和容易对位失败的问题,使得移动机器人回充对位的成功率高达95%以上。与此同时,由于增加红外反射灯的发射距离,可以在较远的地方接收到红外信息,进而可以快速进行充电基站寻找和导航,避免了因为寻找充电基站带来的时间消耗。
技术特征:1.一种基于红外和激光雷达的移动机器人自动回充方法,其特征在于,应用于主机;所述方法包括:
2.根据权利要求1所述的基于红外和激光雷达的移动机器人自动回充方法,其特征在于,所述搜寻策略包括如下:
3.根据权利要求1所述的基于红外和激光雷达的移动机器人自动回充方法,其特征在于,所述基于红外信号和激光雷达信号双重确认主机确在充电基站的正前方,包括:若主机上的红外接收器接收到充电基站发射的红外信号,且主机上的激光雷达扫描到位于充电基站顶部的特征区域,则能双重确认主机位于充电基站的正前方。
4.根据权利要求1所述的基于红外和激光雷达的移动机器人自动回充方法,其特征在于,主机根据充电基站红外信号和激光雷达接收信息进行回充对位的过程包括:
5.根据权利要求1所述的基于红外和激光雷达的移动机器人自动回充方法,其特征在于,主机在回充对位后在向所述充电基站靠近的过程中根据实时距离值逐级减速,包括:
6.一种基于红外和激光雷达的移动机器人自动回充系统,其特征在于,包括主机和充电基站;
7.根据权利要求6所述的基于红外和激光雷达的移动机器人自动回充系统,其特征在于,所述充电基座上共设有四个红外发射器,分别是左前方红外发射器、右前方红外发射器、正前方两个红外发射器;所述主机上设有相应的四个红外接收器,分别是左前方红外接收器、右前方红外接收器、正前方两个红外接收器;正前方两个红外接收器的间距大于正前方两个红外发射器的间距。
8.根据权利要求6所述的基于红外和激光雷达的移动机器人自动回充系统,其特征在于,所述充电基站对红外发射器的红外信号进行编码,以供主机根据接收到的编码信息及接收到该编码信息的红外接收器编号进行实时调整位姿,以使主机正前方的红外接收器接收所述编码信息。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至5中任一项所述基于红外和激光雷达的移动机器人自动回充方法。
10.一种计算机程序产品,其特征在于,所述计算机程序产品中包括计算机程序代码,当所述计算机程序代码在计算机上运行时,使得所述计算机实现如权利1至5中任一项所述基于红外和激光雷达的移动机器人自动回充方法。
11.一种机器人主机,包括存储器、处理器及存储在存储器上的计算机程序,其特征在于,所述处理器执行所述计算机程序以实现权利要求1至5中任一项所述基于红外和激光雷达的移动机器人自动回充方法。
技术总结本申请提供基于红外和激光雷达的移动机器人自动回充方法、系统、介质、程序产品及主机,本申请采用红外与激光雷达相结合的方式进行机器人自动回充,避免了仅使用红外对位导致的精度低和容易对位失败的问题,使得移动机器人回充对位的成功率高达95%以上。与此同时,由于增加红外反射灯的发射距离,可以在较远的地方接收到红外信息,进而可以快速进行充电基站寻找和导航,避免了因为寻找充电基站带来的时间消耗。技术研发人员:聂仕华,刘方,白晓东受保护的技术使用者:上海黑眸智能科技有限责任公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/149241.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表