基于改进蚁群算法的无人机群森林火点探测与扑灭方法及系统
- 国知局
- 2024-07-30 09:21:56
本发明涉及无人机控制,尤其涉及一种基于改进蚁群算法的无人机群森林火点探测与扑灭方法。
背景技术:
1、森林火灾对自然生态环境造成深远的破坏,严重威胁着人类的生命及财产安全。森林火灾是突发性的自然灾害,由于地形和风向等因素,火势蔓延迅速,救援难度大。常见的森林火灾扑救方法有消防员人工灭火、直升机投放灭火弹等方式,这些方法都存在一定的局限性,例如:消防员在森林野火造成的有毒烟尘、高温、火焰环境中行动不便,无法保障生命安全;使用直升机运送消防资源时,烟雾、地形等因素造成视线受阻,导致灭火效率降低。无人机由于其高机动性和较低的成本逐渐在森林火灾救援中得到重视,如野火探测和监测、火险测绘和森林监测等。
2、使用单一的无人机来探测和跟踪森林火灾,其能力在一定时间内所能覆盖的区域方面有限,且操作人员靠近火区,暴露在火灾危险中。多无人机系统通过一组无人机的协调工作,执行更复杂的任务,具有较好的整体复原力、效率和独立性,但还面临着在多热点情况下路径规划会局部收敛的挑战,例如,由于粒子群算法中的吸引因子,无人机会相互收敛,这导致覆盖区域被限制在一个点上,无法扫描搜索空间中其他可能的热点。
技术实现思路
1、发明目的:本发明提出一种基于改进蚁群算法的无人机群森林火点检测与扑灭方法,并进一步提出一种可以实现上述方法的系统,以解决现有技术存在的上述问题。
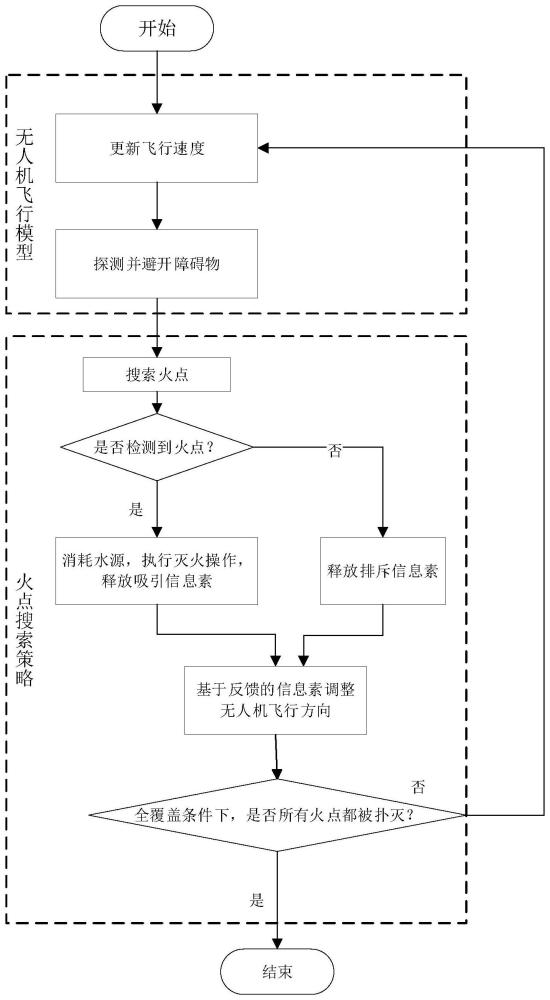
2、作为本发明的第一个方面,提出一种基于改进蚁群算法的无人机群森林火点探测与扑灭方法,步骤如下:
3、s1、根据无人机的初始飞行速度与初始载水量,更新当前时刻的无人机飞行速度;
4、s2、无人机探测当前飞行方向是否有障碍物,如果有障碍物则执行避障操作;
5、s3、无人机搜索火点,如果当前区域内没有火点,则释放排斥信息素;如果当前区域内有火点,则消耗水源进行灭火,并在当前区域内释放吸引信息素;
6、s4、根据所述排斥信息素和所述吸引信息素更新转移概率函数,无人机根据转移概率函数决定下一时刻飞行方向;
7、s5、全覆盖条件下,检查火点数目是否为0:
8、如果火点数目为0,则结束当前轮次的火点探测与扑灭;
9、如果火点数目不为0,则重复执行步骤s1至步骤s4。
10、在第一方面进一步的实施例中,步骤s1中当前时刻的无人机飞行速度的表达式如下:
11、
12、式中,v(t)表示在t时刻无人机的飞行速度;w(t)表示t时刻无人机的载水量;v0表示无人机的初始速度;w0表无人机的初始载水量。
13、在第一方面进一步的实施例中,步骤s2进一步包括:无人机在飞行过程中,检测以无人机为圆心的预定夹角和半径的扇形区域内是否有障碍物;如果该扇形区域内存在障碍物,则无人机向左转动预定角度并减速,以避开的障碍物。
14、在第一方面进一步的实施例中,步骤s3中排斥信息素的更新公式如下:
15、βij(t+1)=(1-ρβ)βij
16、
17、式中,βij(t)表示在t时刻路段(i,j)上的排斥信息素浓度;ρβ表示排斥信息素的挥发系数;δβij表示排斥信息素的增加量;表示蚂蚁k在这次寻找路径结束之后在路段(i,j)上所留下的排斥信息素的量。
18、在第一方面进一步的实施例中,步骤s3中吸引信息素的更新公式如下:
19、αij(t+1)=(1-ρα)αij(t)+δαij
20、
21、式中,αij(t)表示在t时刻路段(i,j)上的吸引信息素浓度;ρα表示吸引信息素的挥发系数;δαij表示吸引信息素的增加量;表示蚂蚁k在这次寻找路径结束之后在路段(i,j)上所留下的吸引信息素的量。
22、在第一方面进一步的实施例中,步骤s4中无人机的飞行方向转移概率函数如下:
23、
24、式中,pij表示无人机飞行方向的转移概率;αij表示在路段(i,j)上的吸引信息素的浓度;βij表示在路段(i,j)上的排斥信息素的浓度;dij表示路段(i,j)的距离。
25、作为本发明的第二个方面,提出一种无人机群森林火点探测与扑灭系统,该系统包括由若干无人机编队组成的无人机群;还包括一个控制模块;所述控制模块与所述无人机群建立通信,并对无人机群发出控制指令。
26、在第二方面进一步的实施例中,该控制模块包括飞行速度控制单元、避障控制单元、火点搜寻单元、航向更新单元、检查单元。
27、飞行速度控制单元用于根据无人机的初始飞行速度与初始载水量,更新当前时刻的无人机飞行速度。
28、避障控制单元用于控制无人机探测当前飞行方向是否有障碍物,如果有障碍物则控制无人机执行避障操作。
29、火点搜寻单元用于控制无人机搜索火点,如果当前区域内没有火点,则释放排斥信息素;如果当前区域内有火点,则消耗水源进行灭火,并在当前区域内释放吸引信息素。
30、航向更新单元用于根据所述排斥信息素和所述吸引信息素更新转移概率函数,控制无人机根据转移概率函数决定下一时刻飞行方向。
31、检查单元用于在全覆盖条件下检查火点数目是否为0;如果火点数目为0,则结束当前轮次的火点探测与扑灭;如果火点数目不为0,则继续当前轮次的火点探测与扑灭。
32、作为本发明的第三个方面,提出一种计算机可读存储介质,该存储介质中存储有至少一个可执行指令,所述可执行指令在电子设备上运行时,使得电子设备执行如第一方面所述的无人机群森林火点探测与扑灭方法。
33、相比于现有技术,本发明存在如下有益效果:
34、1、本发明设置了约束性条件,为无人机飞行模型加入避障功能,并考虑了飞行速度和载水量之间的关系,更加贴合实际情况。
35、2、本发明引入吸引信息素和排斥信息素改进蚁群算法,相比传统蚁群算法以及随机行走算法,本发明所述方法能够更快地覆盖所有搜索区域,具有较短的收敛时间,从而快速检测到火灾点,将火灾控制在较小的范围内,同时对树木密度保持更大的鲁棒性。
技术特征:1.一种基于改进蚁群算法的无人机群森林火点探测与扑灭方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的无人机群森林火点探测与扑灭方法,其特征在于,所述根据无人机的初始飞行速度与初始载水量,更新当前时刻的无人机飞行速度:
3.根据权利要求1所述的无人机群森林火点探测与扑灭方法,其特征在于,所述无人机探测当前飞行方向是否有障碍物,如果有障碍物则执行避障操作,包括:
4.根据权利要求1所述的无人机群森林火点探测与扑灭方法,其特征在于,所述无人机搜索火点,如果当前区域内没有火点,则释放排斥信息素;排斥信息素的更新公式如下:
5.根据权利要求1所述的无人机群森林火点探测与扑灭方法,其特征在于,所述如果当前区域内有火点,则消耗水源进行灭火,并在当前区域内释放吸引信息素;吸引信息素的更新公式如下:
6.根据权利要求1所述的无人机群森林火点探测与扑灭方法,其特征在于,所述根据所述排斥信息素和所述吸引信息素更新转移概率函数,无人机根据转移概率函数决定下一时刻飞行方向;无人机的飞行方向转移概率函数如下:
7.一种无人机群森林火点探测与扑灭系统,其特征在于,包括由若干无人机编队组成的无人机群;还包括一个控制模块;所述控制模块与所述无人机群建立通信,并对无人机群发出控制指令。
8.根据权利要求7所述的无人机群森林火点探测与扑灭系统,其特征在于,所述控制模块包括:
9.根据权利要求8所述的无人机群森林火点探测与扑灭系统,其特征在于,所述控制模块还包括:
10.一种计算机可读存储介质,其特征在于,所述存储介质中存储有至少一个可执行指令,所述可执行指令在电子设备上运行时,使得电子设备执行如权利要求1至6中任一项所述的无人机群森林火点探测与扑灭方法。
技术总结本发明提供了一种基于改进蚁群算法的无人机群森林火点探测与扑灭方法及系统,涉及无人机控制技术领域。步骤如下:根据初始飞行速度与初始载水量,更新无人机飞行速度;探测当前飞行方向是否有障碍物并执行避障操作;搜索当前区域火点,如果没有火点则释放排斥信息素;如果有火点则消耗水源进行灭火,并在当前区域内释放吸引信息素;根据排斥信息素和吸引信息素更新转移概率函数,根据转移概率函数决定下一时刻飞行方向;全覆盖条件下,如果火点数目为0,则结束当前轮次的火点探测。本发明考虑了飞行速度和载水量之间的关系,更加贴合实际情况;引入吸引信息素和排斥信息素改进蚁群算法,能够更快地覆盖所有搜索区域,快速检测火灾点。技术研发人员:薛芳琳,耿鹏,赵小燕,陈瑞,刘淼,刘健强受保护的技术使用者:南京工程学院技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/149201.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表