一种基于OpenPLC的单轴运动控制方法
- 国知局
- 2024-07-30 09:21:38
本发明涉及plc工控软件、运动控制领域,一种基于openplc的单轴运动控制方法。
背景技术:
0、技术背景
1、随着plc系统硬件的标准化、通用化程度的提高,工控软件已成为plc技术与产品竞争的核心。iec 61131国际标准为工业控制系统提供了先进的软件模型和规范化、通用化的编程语言,已成为当前plc系统软件开发的主要方法,并且得到plcopen国际组织的大力推广。这使不同工业需求领域的装备控制软件可通过统一的工控软件开发平台进行模块化开发,显著提升了工业控制软件的标准化程度和可移植性,大幅降低了人力、研发、培训和技术支持的成本(cn202211303638.3)。目前基于iec61131-3标准的plcopen规范在运动控制领域得到了广泛应用。大部分商用工控软件都集成了plcopen规范功能库,例如beckhoff公司的plc产品将符合plcopen规范功能库tcmc2集成在twincat软件中;3s公司将符合plcopen规范的基本功能库sm_plcopen、数控功能库sm_cnc、机器人功能库sm_robtic都集成在codesys编程平台中。国内许多公司也在逐步采用plcopen规范相关研究,例如南京阿斯顿机器人、广东大族激光都已经将plcopen功能块应用于机器人编程;深圳雷赛公司基于codesys软件平台开发了一系列运动控制器。但是这些公司大多采用国外的商用软件,其开发的功能块仅能适用于特定平台,不具有开放性,产品技术受制于人。在这样的背景下,本发明提出,依靠一款开源软件平台openplc,对plcopen规范中的单轴运动控制功能块进行开发,旨在促进国产plc软件运动控制功能的开发。
技术实现思路
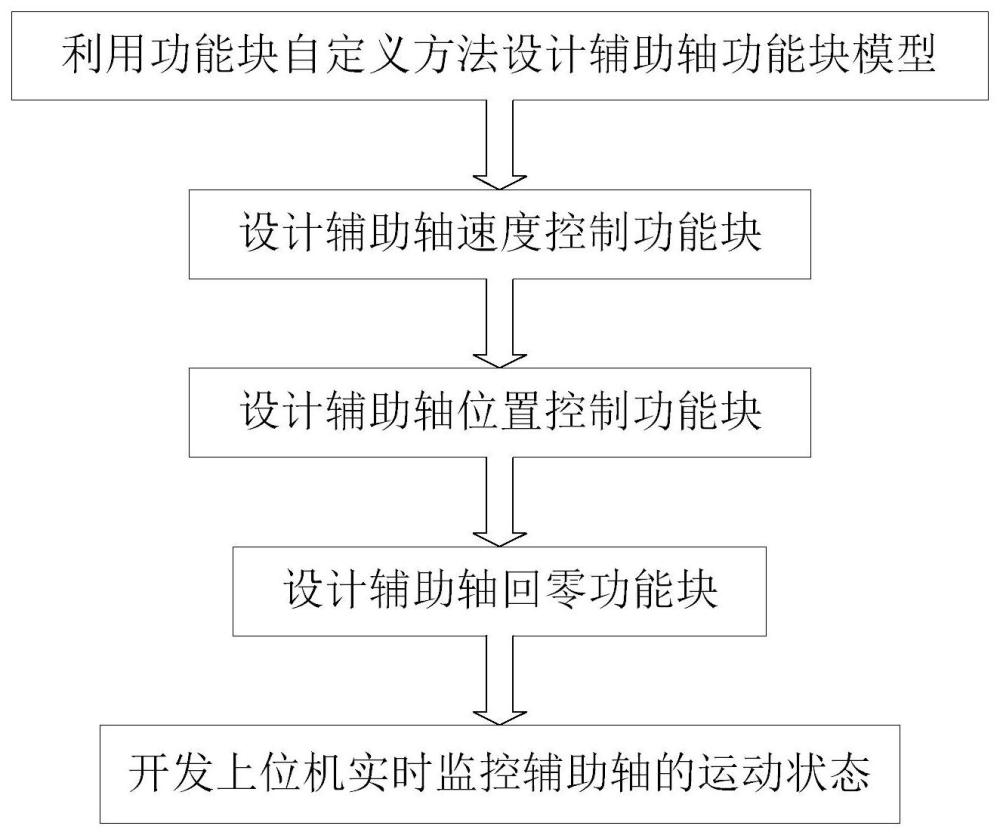
1、针对以上问题,本发明提出了一种基于openplc的单轴运动控制方法。具体包括以下步骤:解析openplc源码,得出自定义功能块的方法;设计速度控制功能块算法,实现轴的平稳加减速,并保持目标速度稳定运行;设计位置控制功能块算法,实现被控轴精准、快速且平稳地停在目标位置;设计回零功能块算法,用于寻找轴的参考位置;使用qt编辑器开发上位机实时监控轴的运动状态。
2、本发明至少通过如下技术方案之一实现。
3、一种基于openplc的单轴运动控制方法,包括以下步骤:
4、建立openplc编辑器中自定义功能块;
5、使用梯形速度规划和s型速度规划方法建立速度控制功能块;
6、使用s型加减速算法建立位置控制功能块;
7、使用零位信号加脉冲信号建立回零功能块;
8、使用qt编辑器开发上位机实时监控轴的运动状态。
9、进一步地,解析openplc源码,建立openplc编辑器中自定义功能块,包括以下步骤:
10、1)首先为新的功能块创建一个xml文件;
11、2)修改definitions.py文件,将新建的xml文件添加到其中;
12、3)修改matiec库,即使用st语言将新功能块加入到matiec库,使新的功能块被编译;
13、4)为自定义的功能块编写c代码,将功能块的c语言实现添加到openplc编辑器的仿真库中。
14、进一步地,所述为新的功能块创建一个xml文件是用xml语言为新功能块书写规范性描述,包括明确功能块的类型、属性和行为,在xml文件中,使用标签来定义功能块的各个方面;在xml文件中,定义功能块的布局和位置信息,使用<layout>或<position>标签指定功能块在界面上的摆放方式;设置事件处理程序,以定义功能块的响应行为。
15、进一步地,所述修改definitions.py文件,将新建的xml文件添加到其中是将新建的xml文件加载到openplc编辑器的初始化文件definitions.py中;definitions.py文件负责集中管理openplc编辑器中各个功能块的xml实现。
16、进一步地,所述梯形速度规划是指利用梯形加减速算法对电机加速度进行约束,从而保证速度指令变化的连续性,速度控制功能块仅对目标速度进行规划,其速度计算公式为:
17、vt=v0+at
18、其中vt为每个周期输出的指令速度,v0为初速度,t为运行时间,a为加/减速度。
19、进一步地,s型速度规划是指利用s型曲线插补算法对电机加速度进行约束,其过程分为加加速、匀加速、减加速三个阶段;假设以初速度v0、加/减速度a、加加速度j、目标速度vm进行速度规划分析,当vm-v0>a2/j时,速度规划需要经历匀加速阶段才能加速到目标速度;当vm-v0<a2/j时,速度规划不需要经历匀加速阶段就能到达目标速度,同时也无需加速到最大加速度。
20、进一步地,使用零位信号加脉冲信号建立回零功能块依据零位开关与增量编码器z信号脉冲作为找零依据,系统上电后,电机轴首先向负限位开关方向运动,直到负限位开关信号动作后,电机向正限位开关方向运动,当检测到零位开关信号动作后,立即改变运动方向与速度,记录反向运动后硬件开关由高变低后的第一个z信号位置值作为系统零点,然后电机轴停止并切换到位置模式,在零点处闭环。
21、进一步地,上位机的界面分为导航界面,导航界面中含有对应的子界面;
22、导航界面包括信号控制器模块、示波器模块和控制台模块,点击相应模块即可进入子界面。
23、进一步地,在信号控制器界面为表格形式,可自行添加需要监控的信号;
24、在示波器界面含有坐标轴和多种控制按钮,选择需要监控的信号后,该信号的变化会以曲线的形式显示在坐标轴上,通过控制按钮调节观察的幅值尺度和时间尺度。
25、进一步地,不同的被控对象设对应不同的控制台界面,不同的控制台界面包含对应的控制按钮和实时显示窗口;控制按钮包括系统的启停、紧急制动、模式切换按钮;实时显示窗口设有被控对象的目标速度、目标位置,实时显示窗口显示被控对象当前的速度和位置。
26、与现有的控制方法相比,本发明的有益效果为:
27、本发明提供了一套低成本、低门槛的单轴运动控制方法,非常有利于小型数控公司对于plcopen规范中的功能块进行开发,在研发初期引入此套控制方法能够很好解决开发成本高的问题,同时能提供很好的扩充性。
技术特征:1.一种基于openplc的单轴运动控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于openplc的单轴运动控制方法,其特征在于,解析openplc源码,建立openplc编辑器中自定义功能块,包括以下步骤:
3.根据权利要求2所述的一种基于openplc的单轴运动控制方法,其特征在于,所述为新的功能块创建一个xml文件是用xml语言为新功能块书写规范性描述,包括明确功能块的类型、属性和行为,在xml文件中,使用标签来定义功能块的各个方面;在xml文件中,定义功能块的布局和位置信息,使用<layout>或<position>标签指定功能块在界面上的摆放方式;设置事件处理程序,以定义功能块的响应行为。
4.根据权利要求2所述的一种基于openplc的单轴运动控制方法,其特征在于,所述修改definitions.py文件,将新建的xml文件添加到其中是将新建的xml文件加载到openplc编辑器的初始化文件definitions.py中;definitions.py文件负责集中管理openplc编辑器中各个功能块的xml实现。
5.根据权利要求1所述的一种基于openplc的单轴运动控制方法,其特征在于,所述梯形速度规划是指利用梯形加减速算法对电机加速度进行约束,从而保证速度指令变化的连续性,速度控制功能块仅对目标速度进行规划,其速度计算公式为:
6.根据权利要求1所述的一种基于openplc的单轴运动控制方法,其特征在于,s型速度规划是指利用s型曲线插补算法对电机加速度进行约束,其过程分为加加速、匀加速、减加速三个阶段;假设以初速度v0、加/减速度a、加加速度j、目标速度vm进行速度规划分析,当vm-v0>a2/j时,速度规划需要经历匀加速阶段才能加速到目标速度;当vm-v0<a2/j时,速度规划不需要经历匀加速阶段就能到达目标速度,同时也无需加速到最大加速度。
7.根据权利要求1所述的一种基于openplc的单轴运动控制方法,其特征在于,使用零位信号加脉冲信号建立回零功能块依据零位开关与增量编码器z信号脉冲作为找零依据,系统上电后,电机轴首先向负限位开关方向运动,直到负限位开关信号动作后,电机向正限位开关方向运动,当检测到零位开关信号动作后,立即改变运动方向与速度,记录反向运动后硬件开关由高变低后的第一个z信号位置值作为系统零点,然后电机轴停止并切换到位置模式,在零点处闭环。
8.根据权利要求1所述的一种基于openplc的单轴运动控制方法,其特征在于,上位机的界面分为导航界面,导航界面中含有对应的子界面;
9.根据权利要求8所述的一种基于openplc的单轴运动控制方法,其特征在于,在信号控制器界面为表格形式,可自行添加需要监控的信号;
10.根据权利要求8所述的一种基于openplc的单轴运动控制方法,其特征在于,不同的被控对象设对应不同的控制台界面,不同的控制台界面包含对应的控制按钮和实时显示窗口;控制按钮包括系统的启停、紧急制动、模式切换按钮;实时显示窗口设有被控对象的目标速度、目标位置,实时显示窗口显示被控对象当前的速度和位置。
技术总结本发明公开了一种基于OpenPLC的单轴运动控制方法,包括以下步骤:解析OpenPLC源码,得出自定义功能块的方法;设计速度控制功能块算法,实现轴的平稳加减速,并保持目标速度稳定运行;设计位置控制功能块算法,实现被控轴精准、快速且平稳地停在目标位置;设计回零功能块算法,用于寻找轴的参考位置;使用QT编辑器开发上位机实时监控轴的运动状态。本发明提供一套低成本、低门槛、基于开源软件的单轴运动控制方法,在研发初期引入此套控制方法能够很好解决开发成本高的问题,同时能提供很好的扩充性。技术研发人员:肖洋,黄道平,刘少君,李艳,刘乙奇受保护的技术使用者:华南理工大学技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/149185.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表