一种无人机控制方法和无人机与流程
- 国知局
- 2024-07-30 09:22:50
本技术涉及无人机控制领域,尤其涉及一种无人机控制方法和无人机。
背景技术:
1、无人机是一种无需搭载人员,可以远程控制飞行器。无人机通常由飞行控制系统、传感器、通信装置和动力系统组成。它们可以被用于军事侦察、监测和打击任务,也可以在农业领域用于农作物施肥、喷洒农药等作业,另外还被广泛应用于航拍、地质勘查、应急救援等领域。随着技术的不断发展,无人机的应用也在不断扩展,成为现代社会中不可或缺的一部分。
2、现有技术中,一般通过终端设备对无人机进行远程控制,终端设备实时接收无人机发送的数据信息,并向无人机发送操作指令,从而控制无人机完成各项作业任务。
3、然而,无人机在飞行的过程中容易接收到其他的无线电信号,使得无人机的通信信号被干扰或掩盖。这可能会导致无人机与终端设备失去联系,无法接收指令或发送数据。
技术实现思路
1、本技术提供了一种无人机控制方法和无人机,在检测到无线电干扰后,可以自动依据无线电干扰的方向选择不同的飞行路径,到达无线电干扰较弱的位置,以降低无线电对无人机信号的影响,从而尽快与终端设备重新建立联系。
2、第一方面,一种无人机控制方法,包括:
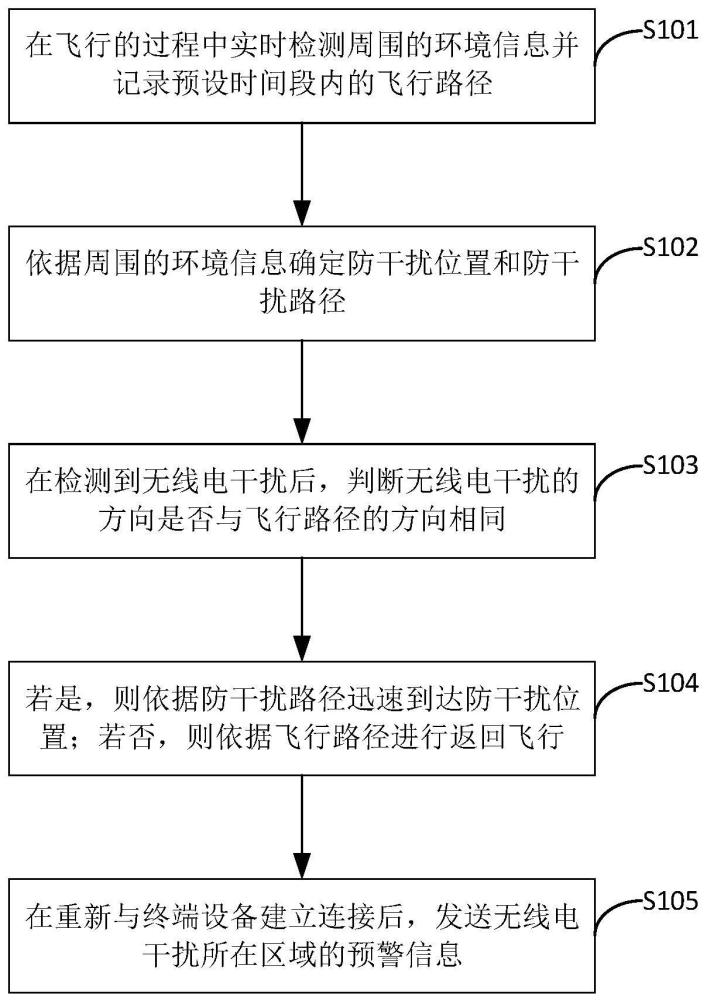
3、在飞行的过程中实时检测周围的环境信息并记录预设时间段内的飞行路径,该飞行路径包括飞行方向、角度、高度;该周围的环境信息为预设距离内的建筑物信息;
4、依据该周围的环境信息确定防干扰位置和防干扰路径,该防干扰位置为预设类型的大型建筑的背面位置;
5、在检测到无线电干扰后,判断无线电干扰的方向是否与该飞行路径的方向相同;
6、若是,则依据该防干扰路径迅速到达该防干扰位置,若否,则依据该飞行路径进行返回飞行;
7、在重新与终端设备建立连接后,发送无线电干扰所在区域的预警信息。
8、通过上述实施例,无人机可以实时检测周围环境信息并记录飞行路径,同时根据周围环境信息确定防干扰位置和防干扰路径。在飞行过程中,无人机会检测预设距离内的建筑物信息,并根据这些信息确定防干扰位置,通常是大型建筑的背面位置。当无线电干扰发生时,无人机会判断干扰的方向是否与飞行路径相同,如果相同,无人机将迅速飞往防干扰位置;如果不同,无人机将返回原飞行路径。该方法能够帮助无人机有效应对无线电干扰,在受到无线电干扰后及时建立与终端设备之间的通信连接。
9、在一些实施例中,该依据该周围的环境信息确定防干扰位置和防干扰路径的步骤,具体包括:
10、依据该周围的环境信息确定多个防干扰位置;
11、将该多个防干扰位置按照距离进行优先级排序,该距离与该优先级排序反相关;
12、依据优先级排序中最高的防干扰位置生成防干扰路径。
13、通过上述实施例,无人机可以根据周围环境信息,可以确定多个防干扰位置,并按照与无人机的距离进行优先级排序。优先级最高的防干扰位置将被选为目标位置,然后生成相应的防干扰路径。通过这种方式,无人机能够快速选择出最佳的防干扰路径,进而确定了后续出现无线电干扰时无人机的自主飞行路径。
14、在一些实施例中,在该依据该防干扰路径迅速到达该防干扰位置的步骤之前,还包括:
15、判断该优先级最高的防干扰位置的方向是否与该无线电干扰的方向相同;
16、若是,则依据该优先级排序中第二的防干扰位置生成新的防干扰路径。
17、通过上述实施例,无人家可以在检测到优先级最高的防干扰位置的方向与该无线电干扰的方向相同时,将优先级排序中排名第二的防干绕位置确定为目标防干扰位置,并依据该目标防干扰位置生成新的防干扰路径,从而削弱了无线电对无人机在防干扰路径飞行过程中的持续干扰。
18、在一些实施例中,在该若是,则依据该防干扰路径迅速到达该防干扰位置;若否,则依据该飞行路径进行返回飞行的步骤之后,还包括:
19、检测当前信号是否可以与终端设备建立连接;
20、若否,则确定新的防干扰位置和该新的防干扰位置对应的防干扰路径;
21、依据该新的防干扰位置对应的防干扰路径到达该新的防干扰位置。
22、通过上述实施例,无人机可以在到达防干扰位置或返回飞行的过程中实时检测当前信号是否可以与终端设备建立连接,并在确定无法建立连接的情况下选择新的防干扰位置,并前往该新的防干扰位置尝试与终端设备建立通信连接,从而提高了无人机在遇到无线电干扰的情况下与终端设备建立通信连接的概率。
23、在一些实施例中,在该在飞行的过程中实时检测周围的环境信息并记录预设时间段内的飞行路径的步骤之后,还包括:
24、实时检测周围环境的电磁干扰或gps干扰的强度;
25、当检测到该电磁干扰或gps干扰的强度超过预设强度阈值时,向终端设备发出预警信息。
26、通过上述实施例,无人机可以实时检测周围环境的电磁干扰或gps干扰,并在该电磁干扰或gps干扰的强度超过预设强度阈值时,向终端设备发出预警信息,提醒用户控制无人机远离该区域。从而可以防止无人机因为电磁干扰或gps干扰而造成的损坏。
27、在一些实施例中,在该实时检测周围环境的电磁干扰或gps干扰的强度的步骤之后,还包括:
28、若检测到突然失去gps定位信息,则保持当前位置的悬停状态。
29、通过上述实施例,无人机可以在无法检测到自身的定位信息时保持悬停状态,避免在没有gps定位信息下飞行可能造成的损坏。
30、在一些实施例中,在该在飞行的过程中实时检测周围的环境信息并记录预设时间段内的飞行路径的步骤之后,还包括:
31、在检测到与行人或障碍物的距离小于预设距离阈值时,进行紧急避让,该紧急避为自动向远离该行人或障碍物的方向移动。
32、通过上述实施例,无人机可以在检测到与行人或障碍物的距离小于预设距离阈值时,进行紧急避让,从而降低碰撞发生的概率,或者尽可能避免被恶意攻击。
33、第二方面,本技术提供一种无人机,包括:
34、信息记录模块,用于在飞行的过程中实时检测周围的环境信息并记录预设时间段内的飞行路径;该周围的环境信息为预设距离内的建筑物信息;
35、路径确认模块,用于依据该周围的环境信息确定防干扰位置和防干扰路径,该防干扰位置为预设类型的大型建筑的背面位置;
36、方向判断模块,用于在检测到无线电干扰后,判断无线电干扰的方向是否与该飞行路径的方向相同;
37、防干扰处理模块,用于在无线电干扰的方向与该飞行路径的方向相同时,依据该防干扰路径迅速到达该防干扰位置;在无线电干扰的方向与该飞行路径的方向不同时,则依据该飞行路径进行返回飞行;
38、干扰预警模块,用于在重新与终端设备建立连接后,发送无线电干扰所在区域的预警信息。
39、本技术提供的无人机可以实现上述实施例提供的一种无人机控制方法,此处不再赘述。
40、第三方面,本技术实施例提供了一种无人机,该无人机包括:一个或多个处理器和存储器;该存储器与该一个或多个处理器耦合,该存储器用于存储计算机程序代码,该计算机程序代码包括计算机指令,该一个或多个处理器调用该计算机指令以使得该无人机可以实现上述实施例提供的一种无人机控制方法,此处不再赘述。
41、第四方面,本技术实施例提供一种计算机可读存储介质,包括指令,当上述指令在无人机上运行时,使得上述无人机可以实现上述实施例提供的一种无人机控制方法,此处不再赘述。
42、本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
43、1、通过上述实施例,无人机可以根据周围环境信息确定防干扰位置和防干扰路径。当检测到无线电干扰时,会判断干扰的方向是否与飞行路径相同,如果相同,无人机将迅速飞往防干扰位置;如果不同,无人机将返回原飞行路径。该方法能够帮助无人机有效应对无线电干扰,在受到无线电干扰后及时建立与终端设备之间的通信连接。
44、2、通过上述实施例,无人机可以根据周围环境信息,可以确定多个防干扰位置,并按照距离进行优先级排序。将优先级最高的防干扰位置确定为目标位置,然后生成相应的防干扰路径。若优先级最高的防干扰位置的方向与该无线电干扰的方向相同,则将优先级排序中排名第二的防干绕位置确定为目标防干扰位置,通过这种方式,无人机能够快速选择出最佳的防干扰路径,也可以削弱无线电对无人机在防干扰路径飞行过程中的持续干扰。此外,还可以在到达防干扰位置或返回飞行的过程中检测到确定无法与终端设备建立连接的情况下选择新的防干扰位置,从而提高了无人机在遇到无线电干扰的情况下与终端设备建立通信连接的概率。
45、3、通过上述实施例,无人机可以实时检测周围环境的电磁干扰或gps干扰,并在该电磁干扰或gps干扰的强度超过预设强度阈值时,向终端设备发出预警信息,提醒用户控制无人机远离该区域。从而可以防止无人机因为电磁干扰或gps干扰而造成的损坏。也可以在无法检测到自身的定位信息时保持悬停状态,避免在没有gps定位信息下飞行可能造成的损坏。还可以在检测到与行人或障碍物的距离小于预设距离阈值时,进行紧急避让,从而降低碰撞发生的概率,或者尽可能避免被恶意攻击。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149280.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。