除尘设备的运动控制系统、方法、介质、及除尘机器人与流程
- 国知局
- 2024-07-30 09:22:49
本发明涉及清洁机器人,特别涉及一种除尘设备的运动控制系统、方法、介质、及除尘机器人。
背景技术:
1、在钢铁、焦化、矿山、冶金、火电、水泥、砂石骨料等行业的堆料场中放置的料堆会在风的作用下产生扬尘。为抑制料堆场的扬尘污染,现有技术中,一般会建造一个大棚覆盖整个堆料场,以封闭堆料场并防止扬尘扩散到外部环境。但是,在料堆的卸料、堆料、铲运、落料、配料、皮带转运等过程中,依然会产生大量的无组织粉尘,粉尘扩散在料场内会严重危害人体健康,还会腐蚀料场内的设备。并且,由于料场形成为一个封闭的环境,也存在粉尘爆炸的风险。因此,即使是密闭的料场,也面临这粉尘治理的问题。现有技术中的除尘方式一般是在料场内布置雾炮,当料场中产生粉尘后,人工开动雾炮喷水以进行降尘。但是这种方式除尘精度不高,除尘效果难以保证,为了完成除尘任务,可能会消耗较多的水资源。
2、为了克服上述问题,现有技术中还引进了智能化程度较高的降尘系统。例如专利文献cn111754638b所描述的,现有的降尘系统一般包括图像采集机构、雾炮机构和中控机构,中控机构接收图像采集机构发送的产尘信号,并向雾炮机构发送驱动信号以驱动雾炮机构进行喷雾降尘。但是,由于粉尘具有排放不集中、不规则和扩散不确定、扩散范围大等特点,现有技术中这样的仅仅通过料场中的产尘情况对雾炮机构进行控制,控制精度有限,也存在水资源浪费的问题。
技术实现思路
1、本发明的目的在于解决现有技术中除尘系统的控制精度有限,为了完成除尘任务可能会消耗较多水资源的问题。
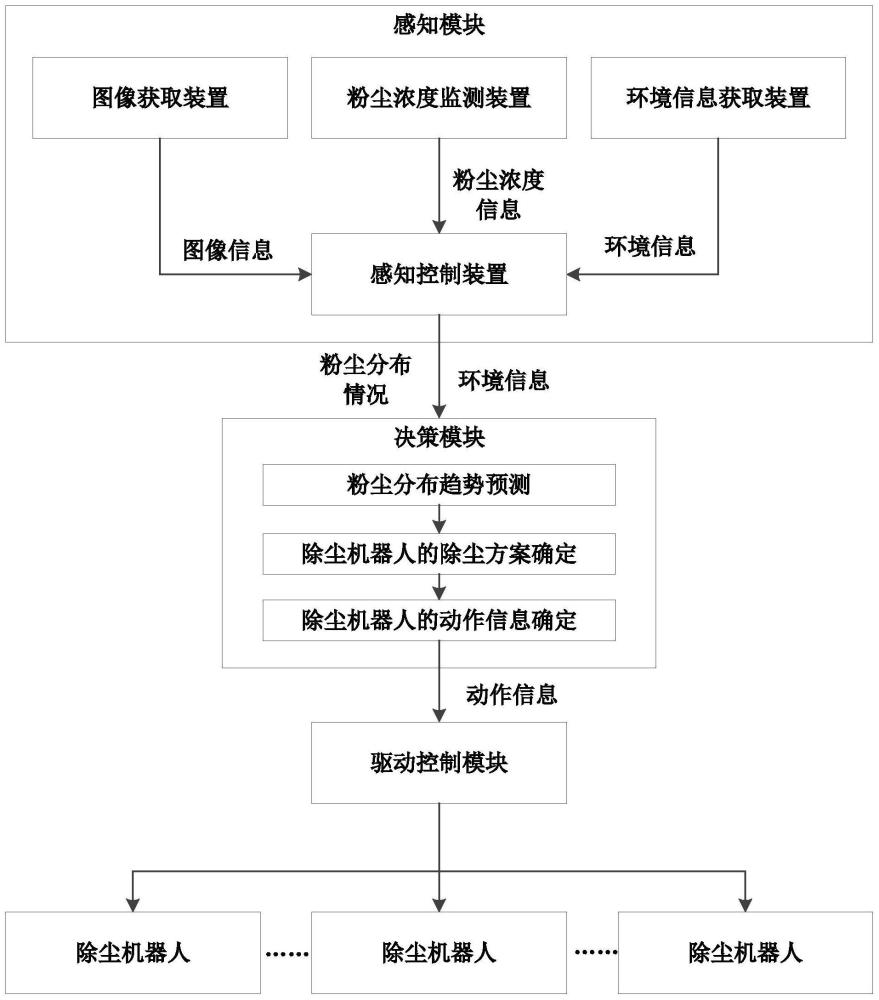
2、为解决上述问题,本发明的实施方式公开了一种除尘设备的运动控制系统,除尘设备包括至少一个除尘机器人;并且,运动控制系统包括:感知模块,感知模块包括感知控制装置、以及分别与感知控制装置通信连接的图像获取装置、粉尘浓度监测装置和环境信息获取装置;其中,图像获取装置获取并发送目标区域内的图像信息,粉尘浓度监测装置获取并发送目标区域内的粉尘浓度信息,环境信息获取装置获取并发送目标区域内的环境信息;感知控制装置接收来自图像获取装置的图像信息、来自粉尘浓度监测装置的粉尘浓度信息、以及来自环境信息获取装置的环境信息,根据图像信息确定目标区域内的粉尘状态、根据粉尘状态和粉尘浓度信息确定目标区域内的污染强度、以及根据环境信息、图像信息、污染强度和粉尘状态确定目标区域内的粉尘分布情况,并发送粉尘分布情况和环境信息;决策模块,决策模块接收来自感知控制装置的粉尘分布情况和环境信息,并根据粉尘分布情况和环境信息预测当前时刻之后的一段时间内目标区域的粉尘分布趋势;并且,决策模块根据粉尘分布趋势和环境信息确定出有关各除尘机器人的除尘目标的除尘方案,根据除尘方案确定出有关各除尘机器人的移动路径和除尘位姿的动作信息,并发送动作信息;驱动控制模块,驱动控制模块接收来自决策模块的动作信息,根据动作信息确定对应于各除尘机器人的执行部件的控制信息,并根据控制信息控制各除尘机器人。
3、采用上述方案,通过感知模块的图像获取装置获取的图像信息可以精准地辨识出目标区域内的粉尘状态并对污染进行精准定位。通过感知模块的粉尘浓度监测装置获取粉尘浓度信息,可以佐证目标区域内的污染强度,使得确定出的粉尘的位置和浓度更准确。通过感知模块的环境信息获取装置获取环境信息,由于考虑了环境因素的影响,可以更准确地掌握目标区域内粉尘的状态,得到更加精确的粉尘分布情况,便于后续得到更准确的除尘资源的分配方式和除尘治理方式。并且,决策模块根据来自感知模块的粉尘分布情况和环境信息预测一段时间后的粉尘分布趋势,考虑到了除尘机器人从初始位置运动至目标除尘位置的时间段内目标区域内粉尘的动态变化情况,可以提高除尘方案的精确度,使得除尘机器人都能运动至除尘效果较佳的位置,为后续进行精准除尘奠定了基础。决策模块还根据除尘方案进一步确定出每个除尘机器人的动作信息,使得除尘机器人能够以较少的成本完成除尘任务,然后由驱动控制模块根据动作信息反推出对应于各除尘机器人的各执行部件的控制信息,从而实现了对除尘机器人的精准控制。通过对除尘机器人的精准控制,可以实现除尘精度的提高,进而可以达到提高除尘效果、降低除尘能耗的效果。
4、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统,图像获取装置为摄像头;其中,图像获取装置获取的图像信息为目标区域经由光束照射后的图像;粉尘浓度监测装置为粉尘浓度传感器;环境信息获取装置包括风速风向传感器;其中,环境信息包括经由风向风速传感器获取的目标区域内的风向和风速。
5、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统,粉尘状态包括目标区域内是否存在粉尘、以及粉尘的运动情况;感知控制装置根据图像信息确定目标区域内的粉尘状态,包括:感知控制装置根据图像信息中的光斑的均匀度确定目标区域内是否存在粉尘,并且,感知控制装置根据图像获取装置连续获取的多张图像中若干指定的颗粒物的位置变化确定粉尘的运动情况。并且,污染强度包括轻度污染、中度污染和重度污染;感知控制装置根据粉尘状态和粉尘浓度信息确定目标区域内的污染强度,包括:目标区域内存在粉尘、且粉尘浓度在第一阈值范围内,则污染强度为轻度污染;目标区域内存在粉尘、且粉尘浓度在第二阈值范围内,则污染强度为中度污染;目标区域内存在粉尘、且粉尘浓度在第三阈值范围内,则污染强度为重度污染。并且,粉尘分布情况包括若干指定图像区域内粉尘的浓度、粉尘的移动方向、以及粉尘的移动速度;感知控制装置根据环境信息、图像信息、污染强度和粉尘状态确定目标区域内的粉尘分布情况,包括:感知控制装置根据图像信息确定指定图像区域,根据目标区域内的风向和风速、以及粉尘状态分别确定各指定图像区域内的粉尘的移动速度和粉尘的移动方向,根据污染强度和图像信息分别确定各指定图像区域内的粉尘的浓度,并根据各指定图像区域内的粉尘的移动速度、粉尘的移动方向、以及粉尘的浓度确定目标区域内的粉尘分布情况。
6、采用上述方案,通过若干指定的颗粒物的位置变化就可以比较准确地体现出整个目标区域中粉尘的运动情况,从而可以加快计算速度、节省计算成本。并且,通过分别确定各指定图像区域内的粉尘的移动速度、粉尘的移动方向、以及粉尘的浓度,并进一步利用各个指定图像区域内的粉尘的移动速度、粉尘的移动方向、以及粉尘的浓度综合确定目标区域内的粉尘分布情况,可以提高粉尘分布情况确定的准确度。
7、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统,第一阈值范围为0μg/m3至30μg/m3;第二阈值范围为30μg/m3至70μg/m3;第二阈值范围为大于70μg/m3;并且,指定图像区域包括粉尘中心点对应的中心区域、以及中心区域的左上方、左下方、右上方和右下方的区域。
8、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统,粉尘分布趋势包括在一段时间内粉尘中心点的移动速度和移动方向、以及目标区域的粉尘浓度变化;决策模块根据粉尘分布情况和环境信息预测当前时刻之后的一段时间内目标区域的粉尘分布趋势,包括:决策模块根据目标区域内的风向和风速、以及各指定图像区域内的粉尘的移动速度和粉尘的移动方向确定粉尘中心点的移动速度和移动方向,并且,决策模块根据目标区域内的风向和风速、以及各指定图像区域内的粉尘的浓度确定目标区域的粉尘浓度变化。
9、采用上述方案,通过多个指定图像区域的粉尘浓度变化体现整个目标区域内的粉尘浓度变化,提高了确定出的粉尘浓度变化的准确度。
10、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统,环境信息获取装置还包括温湿度传感器、降雨量传感器、以及声音传感器;环境信息还包括经由温湿度传感器获取的目标区域内的温度和湿度、经由降雨量传感器获取的目标区域内的降水量、以及经由声音传感器获取的目标区域内的音量;并且,除尘方案包括投入工作的除尘机器人的数量、以及各除尘机器人的目标除尘位置;决策模块根据粉尘分布趋势和环境信息确定出有关各除尘机器人的除尘目标的除尘方案,包括:决策模块根据声音传感器获取的目标区域内的音量、以及预设的音量阈值控制所有的除尘机器人均进入待机状态;决策模块根据粉尘分布趋势、目标区域内的温度和湿度、以及目标区域内的降水量确定从待机状态进入工作状态的除尘机器人的数量以及进入工作状态的各除尘机器人的目标除尘位置。
11、采用上述方案,决策模块根据声音传感器获取的目标区域内的音量、以及预设的音量阈值控制所有的除尘机器人均进入待机状态,各除尘机器人可以在需要执行除尘任务时快速地移动至指定位置,提高了除尘效率。并且,决策模块根据粉尘分布的趋势、并结合目标区域内的温度和湿度以及降水量确定进入工作状态的除尘机器人的数量和目标除尘位置,可以使得确定出的数据准确度更高。
12、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统,感知模块还包括激光雷达和/或红外传感器,激光雷达、红外传感器均与感知控制装置通信连接;其中,激光雷达和红外传感器均用于获取并发送目标区域内粉尘的位置;感知控制装置接收来自激光雷达和/或红外传感器的目标区域内粉尘的位置,并根据目标区域内粉尘的位置以及图像信息确定粉尘状态。
13、采用上述方案,感知控制装置可以根据图像获取装置获取的图像信息、以及激光雷达和红外传感器获取的粉尘的位置综合确定目标区域内是否存在粉尘、以及粉尘的运动情况,提高了数据的精确度。
14、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统,动作信息包括除尘机器人的移动速度、移动加速度、喷水量、以及移动方向;并且,各除尘机器人的执行部件包括传动部件、驱动部件、以及调压阀;其中,根据除尘机器人的移动方向确定传动部件的控制信息,根据除尘机器人的移动速度和移动加速度确定驱动部件的控制信息,根据喷水量确定调压阀的控制信息。
15、采用上述方案,通过根据除尘机器人的动作信息确定出对除尘机器人的各执行部件的控制信息,可以精准地对除尘机器人的移动和喷水进行控制,从而实现精准除尘,并进一步达到降低除尘能耗、节约水资源的效果。
16、本发明的实施方式公开了一种除尘设备的运动控制系统的控制方法,包括:
17、s1:感知模块获取目标区域内的图像信息、粉尘浓度信息、以及环境信息,根据图像信息并利用图像处理神经网络确定目标区域内的粉尘状态、根据粉尘状态和粉尘浓度信息确定目标区域内的污染强度、以及根据环境信息、图像信息、污染强度和粉尘状态确定目标区域内的粉尘分布情况,并发送粉尘分布情况和环境信息;
18、s2:决策模块根据来自感知控制装置的粉尘分布情况和环境信息预测当前时刻之后的一段时间内目标区域的粉尘分布趋势,根据粉尘分布趋势和环境信息确定出有关各除尘机器人的除尘目标的除尘方案,根据除尘方案确定出有关各除尘机器人的移动路径和除尘位姿的动作信息,并发送动作信息;
19、s3:驱动控制模块根据来自决策模块的动作信息确定对应于各除尘机器人的执行部件的控制信息,并根据控制信息控制各除尘机器人。
20、采用上述方案,可以实现对除尘机器人的精准控制,达到提高除尘效果、降低除尘能耗的效果。
21、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统的控制方法,步骤s1中,感知模块获取目标区域内的图像信息之后,还包括:对图像信息进行降噪处理;并且,感知模块根据图像信息并利用图像处理神经网络确定目标区域内的粉尘状态,包括:将图像信息输入至图像处理神经网络中,以生成图像信息对应的光斑的均匀度的结果,并判断光斑的均匀度是否小于预设的均匀度阈值;若是,则目标区域中存在粉尘,并利用图像处理神经网络输出粉尘的浓度估计值;其中,在利用图像处理神经网络输出粉尘的浓度估计值时,还包括根据粉尘浓度估计值和粉尘浓度信息的比较结果调节图像处理神经网络的参数;若否,则继续判断光斑的均匀度是否小于预设的均匀度阈值;以及将图像信息输入至图像处理神经网络中,图像处理神经网络将图像信息对应的连续多张图像进行维度转换,以生成目标区域的多张三维图像,在第一张三维图像中随机选择若干颗粒物,并根据多张三维图像确定选择出的若干颗粒物的位置变化,并根据若干颗粒物的位置变化输出目标区域中粉尘的运动情况。
22、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统的控制方法,根据多张三维图像输出目标区域中粉尘的运动情况后,还包括:经由激光雷达和/或红外传感器获取目标区域内粉尘的位置,并根据激光雷达和/或红外传感器获取的目标区域内粉尘的位置、利用多传感器融合神经网络对目标区域中粉尘的运动情况进行优化处理。
23、采用上述方案,采用多传感器数据融合的方式,并利用图像获取装置获取的图像信息、以及激光雷达和红外传感器获取的粉尘的位置综合确定目标区域内是否存在粉尘、以及粉尘的运动情况,提高了数据的精确度。
24、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统的控制方法,步骤s1中,根据环境信息、图像信息、污染强度和粉尘状态确定目标区域内的粉尘分布情况,包括:根据图像信息确定出粉尘中心点,并基于粉尘中心点在图像信息中确定若干指定图像区域;其中,若干指定图像区域包括:粉尘中心点对应的中心区域、以及中心区域的左上方、左下方、右上方和右下方的区域;根据环境信息中目标区域内的风向和风速、以及目标区域中粉尘的运动情况,利用运动拟合神经网络输出各指定图像区域内粉尘的移动速度和移动方向;根据污染强度和基于图像信息生成的粉尘浓度估计值,利用浓度估算神经网络输出各指定图像区域内粉尘的浓度;根据各指定图像区域内粉尘的移动速度和移动方向、以及粉尘的浓度,利用运动拟合神经网络输出目标区域内的粉尘分布情况。
25、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统的控制方法,步骤s2中,决策模块根据来自感知控制装置的粉尘分布情况和环境信息,利用运动拟合神经网络输出当前时刻之后的一段时间内目标区域的粉尘分布趋势;并且,根据粉尘分布趋势和环境信息确定出有关各除尘机器人的除尘目标的除尘方案,包括:
26、判断环境信息中目标区域内的音量是否大于预设的音量阈值;
27、若是,则控制所有的除尘机器人均进入待机状态,并根据粉尘分布趋势、目标区域内的温度和湿度、以及目标区域内的降水量确定从待机状态进入工作状态的除尘机器人的数量、以及各除尘机器人的目标除尘位置;
28、若否,则继续判断目标区域内的音量是否大于预设的音量阈值。
29、其中,根据粉尘分布趋势、目标区域内的温度和湿度、以及目标区域内的降水量确定从待机状态进入工作状态的除尘机器人的数量、以及各除尘机器人的目标除尘位置,包括:判断目标区域内的降水量是否大于预设的降水量阈值;
30、若是,则维持除尘机器人的待机状态;
31、若否,则根据粉尘分布趋势预测粉尘在一段时间内的最终状态,并根据最终状态下目标区域内粉尘的目标浓度、目标区域内的温度与预设的温度阈值的比较结果、以及目标区域内的湿度与预设的湿度阈值的比较结果确定从待机状态进入工作状态的除尘机器人的数量;其中,若目标浓度对应的污染强度为轻度污染,则控制全部除尘机器人中的三分之一进入工作状态;若目标浓度对应的污染强度为中度污染,则控制全部除尘机器人中的三分之二进入工作状态;若目标浓度对应的污染强度为重度污染,则控制全部除尘机器人均进入工作状态;若目标区域内的温度高于预设的温度阈值和/或湿度低于预设的湿度阈值,则增加全部除尘机器人的数量的三分之一数量的除尘机器人进入工作状态;并根据最终状态下目标区域内粉尘的目标浓度将目标区域划分为与进入工作状态的除尘机器人的数量对应的多个除尘区域,并将各除尘区域的中心点作为目标除尘位置。
32、采用上述方案,根据粉尘分布的趋势、并结合目标区域内的温度和湿度以及降水量确定进入工作状态的除尘机器人的数量和目标除尘位置,可以使得确定出的数据准确度更高,同时也可以根据目标区域内粉尘的情况控制执行除尘任务的除尘机器人的数量,当除尘任务较容易时,仅由部分除尘机器人即可完成除尘任务,无需全部除尘机器人参与除尘,降低了工厂的运作成本。
33、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统的控制方法,动作信息包括除尘机器人的移动速度、移动加速度、喷水量、以及移动方向;步骤s2中,根据除尘方案确定出有关各除尘机器人的移动路径和除尘位姿的动作信息,包括:根据除尘方案确定除尘目标函数和除尘约束函数;根据除尘方案中进入工作状态的除尘机器人的数量、以及各除尘机器人的目标除尘位置随机生成有关进入工作状态的各除尘机器人与目标除尘位置的对应关系的除尘任务,并利用布尔矩阵算法优化除尘任务;将优化后的除尘任务输入深度学习神经网络,并利用随机生成树算法输出各除尘机器人的在各方向的目标位移、目标移动速度、以及目标移动加速度,利用遗传算法输出各除尘机器人的目标喷水量,根据除尘机器人的实际位置和目标区域内的障碍信息调节深度学习神经网络的参数,以输出各除尘机器人在各方向的最优位移、最优移动速度、最优移动加速度和最优喷水量。
34、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统的控制方法,步骤s3中,驱动控制模块根据各除尘机器人在各方向的最优位移、最优移动速度、最优移动加速度和最优喷水量,利用遗传算法输出对应于各除尘机器人的执行部件的控制信息。
35、根据本发明的另一具体实施方式,本发明实施方式公开的除尘设备的运动控制系统的控制方法,除尘目标函数为:
36、
37、其中,为除尘目标函数,tsp为根据目标区域内的粉尘浓度确定的总悬浮物数值,w为各除尘机器人消耗功率的总和,γ均为(0,1)区间的定常参数;
38、除尘约束函数为:
39、
40、其中,x为除尘机器人的决策集,hk为除尘机器人结构约束,gj为除尘机器人对应的动作信息的约束;并且,预设的均匀度阈值的范围为70%至90%;预设的音量阈值的范围为70db至80db;预设的温度阈值的范围为25℃至28℃;预设的湿度阈值的范围为30%至40%。
41、本发明的实施方式公开了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现如上任意实施方式所描述的除尘设备的运动控制系统的控制方法的步骤。
42、本发明的实施方式公开了一种除尘机器人,包括机器人本体,以及控制器。其中,控制器包括存储器、处理器。其中,存储器中存储有计算机程序,处理器执行计算机程序时实现如上任意实施方式所描述的除尘设备的运动控制系统的控制方法的步骤。
43、本发明的有益效果是:
44、本方案提供的除尘设备的运动控制系统,通过感知模块的图像获取装置获取的图像信息可以精准地辨识出目标区域内的粉尘状态并对污染进行精准定位。通过感知模块的粉尘浓度监测装置获取粉尘浓度信息,可以佐证目标区域内的污染强度,使得确定出的粉尘的位置和浓度更准确。通过感知模块的环境信息获取装置获取环境信息,由于考虑了环境因素的影响,可以更准确地掌握目标区域内粉尘的状态,得到更加精确的粉尘分布情况,便于后续得到更准确的除尘资源的分配方式和除尘治理方式。并且,决策模块根据来自感知模块的粉尘分布情况和环境信息预测一段时间后的粉尘分布趋势,考虑到了除尘机器人从初始位置运动至目标除尘位置的时间段内目标区域内粉尘的动态变化情况,可以提高除尘方案的精确度,使得除尘机器人都能运动至除尘效果较佳的位置,为后续进行精准除尘奠定了基础。决策模块还根据除尘方案进一步确定出每个除尘机器人的动作信息,使得除尘机器人能够以较少的成本完成除尘任务,然后由驱动控制模块根据动作信息反推出对应于各除尘机器人的各执行部件的控制信息,从而实现了对除尘机器人的精准控制。通过对除尘机器人的精准控制,可以提高除尘精度,进而达到提高除尘效果、降低除尘能耗、节省水资源的效果。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149278.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。