一种基于PID控制算法的运动控制系统的制作方法
- 国知局
- 2024-07-30 09:25:16
本发明涉及半导体行业的自动化生产,具体为一种基于pid控制算法的运动控制系统。
背景技术:
1、pid控制算法是一种经典的反馈控制算法,常用于运动控制系统中。pid分别代表比例(proport iona l)、积分(i ntegra l)和微分(der i vat ive)三个部分,控制系统根据当前误差的大小来调整系统的输出,使系统的输出趋向期望值,比例(p)部分:比例控制根据当前误差的大小来调整输出,误差越大,输出调整得越快,积分(i)部分:积分控制用于消除系统的静态误差,即长时间累积的误差。它将误差信号进行积分,使系统能够对误差进行更长时间的调整,微分(d)部分:微分控制用于预测系统未来的走势,根据误差变化的速度来调整输出,避免系统产生超调和震荡,pid控制算法通过不断调整比例、积分和微分三个部分的参数,使系统的输出能够稳定地趋向设定值,实现对系统运动的精确控制。在运动控制系统中,pid控制算法可以根据系统的位置、速度或加速度等信号,对执行器进行精准控制,实现各种复杂的运动轨迹和要求。
2、通过合适地选择和调整比例、积分和微分增益系数,pid控制算法能够在运动控制系统中实现较高的精度和稳定性,然而,pid控制算法也存在一些局限性,对于非线性、时变或复杂的系统,可能需要使用更高级的控制算法或结合其他方法来实现更好的控制性能。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于pid控制算法的运动控制系统,解决了pid控制算法存在一些局限性,对于非线性、时变或复杂的系统,可能需要使用更高级的控制算法或结合其他方法来实现更好的控制性能的问题。
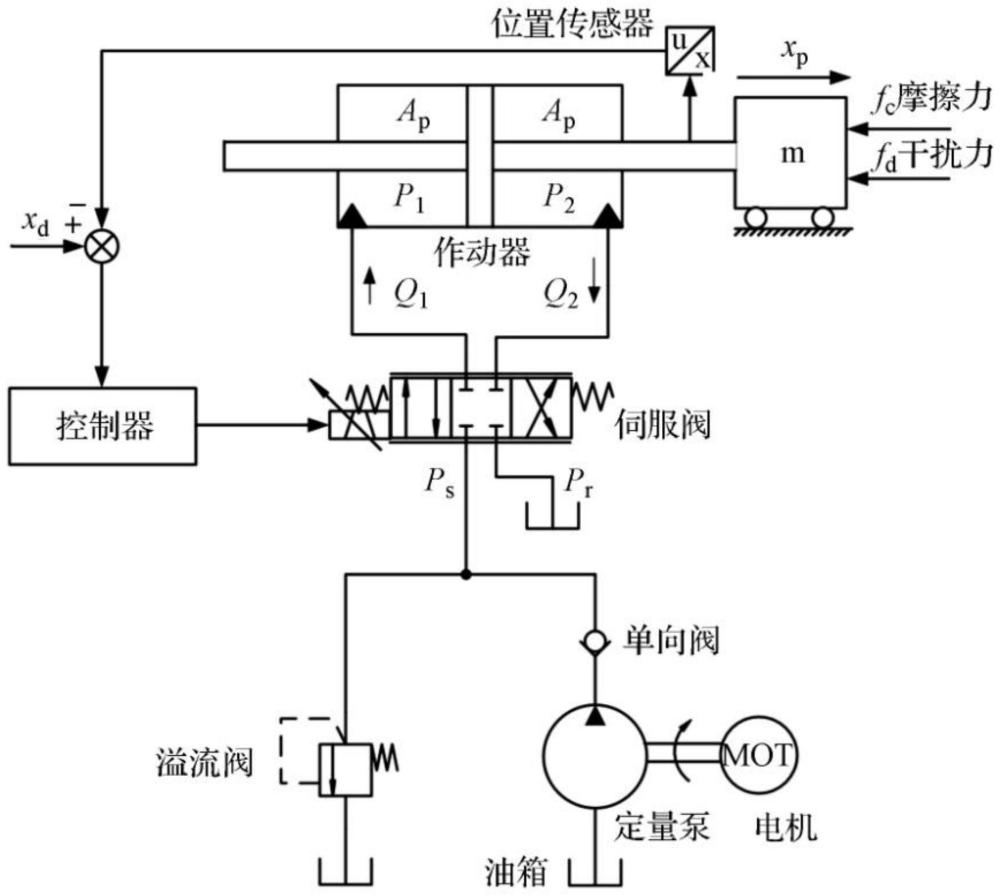
2、为实现以上目的,本发明通过以下技术方案予以实现:一种基于pid控制算法的运动控制系统,包括模糊pid控制器单元、规则改进模糊pid(fpid)控制策略单元、δkp规则库改进思路单元、仿真验证单元,所述模糊pid控制器采用双输入三输出的形式,以液压缸活塞杆输出位移的误差e(t)和误差变化率ec(t)为输入,输出为pid3个参数的增量δkp、δki、δkd,所述规则改进模糊pid(fpid)控制策略是指隶属函数的选取直接影响着系统的控制性能,一般在误差比较大的场合,选取分辨率低的隶属函数smf或zmf,在误差接近于0的情况下,选取分辨率高的隶属函数trimf,故选取传统模糊pid算法和规则改进模糊pid算法的输入/输出变量中7个语言变量:nb(负大)、nm(负中)、ns(负小)、zo(零)、ps(正小)、pm(正中)、pb(正大)所对应的隶属函数均分别为zmf、trimf、trimf、trimf、trimf、trimf、smf,所述仿真验证以阀控对称缸系统为被控对象,对规则改进后的模糊pid控制性能进行仿真研究与分析。在amesim中搭建阀控对称缸的液压系统模型,利用matlab的simulink模块库实现所提控制器的设计,通过matlab自带的fuzzy工具箱,完成对所设计的模糊规则库的编写与创建,借助2个软件的接口技术,实现一个完整的电液位置伺服系统的建模。
3、优选的,所述模糊pid控制器pid控制参数在线修正公式如下:
4、kp=kp0+kδp·δkp;
5、ki=ki0+kδi·δki;
6、kd=kd0+kδd·δkd;
7、式中:kp0,ki0,kd0—pid控制器的初值;
8、ke,kec—量化因子;
9、kδp,kδi,kδd—比例因子。
10、优选的,所述规则改进模糊pid(fpid)控制策略针对传统模糊pid中模糊规则库存在的问题,对传统模糊pid的δkp规则库进行分析,明确与pid整定的经验不符的规则,对其进行修正与改进,并通过仿真实验做进一步的调整,即可形成新的δkp规则库。
11、优选的,所述δkp规则库改进思路是指若e(t)·ec(t)>0时,表明系统的输出随时间的推移趋于发散状态,即误差e(t)会越来越大,此时了快速降低误差使系统能再次达到稳态,就必须适当增大kp。由公式kp=kp0+kδp·δkp(kδp>0)可知,此时,模糊控制应输出一个正的δkp值;因此,当误差e较大时,为使系统具有快速的响应能力,δkp应取大值,故当e、ec均为pb时,δkp应为pb,而传统模糊pid的δkp规则库中对应的为nb(模糊控制输出的δkp值为负),产生矛盾,因此需对此条规则进行调整,当误差e减小为中等大小时,为保证系统既具有足够的响应能力,又能避免产生较大的超调,δkp应取适中值,故当e、ec均为pm时,δkp应为pm,而传统模糊pid的δkp规则库中对应的为nm(模糊控制输出的δkp值为负),产生矛盾,因此需对此条规则进行调整;当误差e较小时,为避免系统在达到稳态时出现振荡,δkp应取小值,故当e、ec均为ps时,δkp应为ps,而传统模糊pid的δkp规则库中对应的为ns(模糊控制输出的δkp值为负),产生矛盾,因此需对此条规则进行调整;根据该思路便可完成对δkp规则库中e与ec同号规则的优化与改进。
12、优选的,所述δkp规则库改进思路若e(t)·ec(t)<0时,表明系统的输出随时间的推移趋于收敛状态,即误差e(t)会越来越小,此时为了使系统的输出稳定在稳态值附近,只需根据偏差e的大小和偏差变化率ec的快慢对δkp适当取值即可;根据该思路便可完成对δkp规则库中e与ec异号规则的优化与改进。
13、优选的,所述仿真验证包括检验规则改进后的模糊pid(fpid)控制器是否具有快速的响应能力,以及更好的位置跟踪精度和抗干扰能力,以电液位置伺服阀控缸系统为被控对象跟踪阶跃信号,并与pid控制器和传统模糊pid控制器进行对比分析。
14、优选的,一种基于pid控制算法的运动控制设备,使用所述的一种基于pid控制算法的运动控制系统。
15、本发明提供了一种基于pid控制算法的运动控制系统。具备以下有益效果:
16、1、本发明通过模糊pid控制器采用双输入三输出的形式,以液压缸活塞杆输出位移的误差e(t)和误差变化率ec(t)为输入,输出为p id3个参数的增量δkp、δki、δkd,选取分辨率低的隶属函数smf或zmf,在误差接近于0的情况下,选取分辨率高的隶属函数trimf,故选取传统模糊p id算法和规则改进模糊p id算法的输入/输出变量中7个语言变量:nb(负大)、nm(负中)、ns(负小)、zo(零)、ps(正小)、pm(正中)、pb(正大)所对应的隶属函数均分别为zmf、tr imf、tr imf、tr imf、tr imf、tr imf、smf,以阀控对称缸系统为被控对象,对规则改进后的模糊pid控制性能进行仿真研究与分析,实现一个完整的电液位置伺服系统的建模,动态调整p id控制器的参数,以适应非线性特性。
17、2、本发明通过p id算法的参数整定,p id控制算法中的比例项、积分项和微分项的参数进行合适的调节确保系统稳定性和性能,在运用过程中采用试错法、经验法则和自动整定方法来找到合适的参数值,进行多次测试来调整到合适的参数。
18、3、本发明通过p id控制算法中的积分项和微分项分别处理误差的累积和未来趋势,从而可以抵消外部扰动对系统的影响。这使得系统对于外部干扰具有一定的抗扰性能力。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149398.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表