车队控制方法、装置及存储介质、控制器、车辆与流程
- 国知局
- 2024-07-30 09:29:41
本发明涉及汽车自动驾驶控制,尤其涉及一种车队控制方法、装置及存储介质、控制器、车辆。
背景技术:
1、随着自动驾驶技术的发展,多车编队协同自动驾驶逐渐被广泛研究。车辆编队行驶可以有效发挥道路承载能力,协同控制技术可以显著降低碰撞风险。车辆间通过传感器和无线通信网络实现信息交互,通过反馈控制实现车队动态连接与队形协调。在实际环境中,车辆之间的无线通讯具有不确定性,例如存在通信延迟、丢包、乱序等现象。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的在于提出一种自动驾驶车队控制方法,使得车队控制模型能够在无线通信存在延迟、丢包、乱序等不确定性因素时保持有效。
2、本发明的第二个目的在于提出一种自动驾驶车队控制装置。
3、本发明的第三个目的在于提出一种计算机可读存储介质。
4、本发明的第四个目的在于提出一种控制器。
5、本发明的第五个目的在于提出一种车辆。
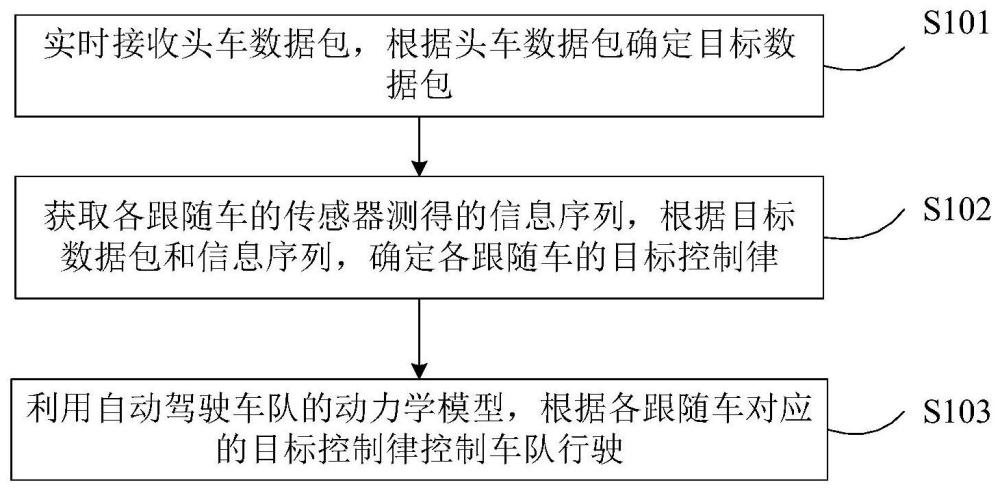
6、为达到上述目的,本发明第一方面实施例提出一种自动驾驶车队控制方法,所述方法包括:实时接收头车数据包,根据所述头车数据包确定目标数据包;获取各跟随车的传感器测得的信息序列,根据所述目标数据包和所述信息序列,确定各所述跟随车的目标控制律;利用自动驾驶车队的动力学模型,根据各跟随车对应的目标控制律控制所述车队行驶。
7、根据本发明实施例的自动驾驶车队控制方法,通过非线性系统状态估计算法进行延迟补偿,使得车队控制模型能够在无线通信存在延迟、丢包、乱序等不确定性因素时保持有效。
8、另外,根据本发明上述实施例提出的自动驾驶车队控制方法还可以具有如下附加的技术特征:
9、根据本发明的一个实施例,所述状态信息包括速度和加速度,根据所述头车数据包确定目标数据包,包括:
10、在k时刻接收到头车数据包σl(k),则选择输出并让
11、若接收到新的头车数据包σl(i),所述新的头车数据包σl(i)在k到k+1时刻内达到且则存储σl(i),并让直到k+1时刻;
12、若未接收到的新的头车数据包,则令k=k+1,并执行选择输出并让
13、根据本发明的一个实施例,所述信息序列m为:
14、
15、其中,表示第j辆车在时刻对应的距离误差、速度和加速度,表示第j辆车在时刻对应的距离误差、速度和加速度,(ej,vj,aj)k表示第j辆车在k时刻对应的距离误差、速度和加速度。
16、根据本发明的一个实施例,根据所述目标数据包和所述信息序列,确定各所述跟随车的目标控制律,包括:
17、对于每一所述跟随车,判断当前时刻是否更新头车数据包;
18、若更新,则从所述信息序列中找出与目标数据包对应的测量信息作为目标测量信息,并更新测量信息,若未更新,则沿用上一时刻的目标测量信息;
19、根据所述目标数据包和所述目标测量信息确定目标控制律。
20、根据本发明的一个实施例,所述自动驾驶车队的动力学模型为:
21、
22、其中,t为采样周期。
23、根据本发明的一个实施例,所述目标控制律为:
24、
25、其中,cj(k)表示,cp、cv、ca、kv、ka为标定的参数,表示第j辆车接收到头车数据的时间延迟,vl表示头车速度信息,al表示头车加速度信息。
26、为达到上述目的,本发明第二方面实施例提出一种自动驾驶车队控制装置,其特征在于,所述装置包括:
27、第一确定模块,用于接收头车数据包,并根据所述头车数据包确定目标数据包;
28、第二确定模块,用于获取各跟随车的传感器测得的信息序列,根据所述目标数据包和所述信息序列,确定各所述跟随车的目标控制律;
29、控制模块,用于利用自动驾驶车队的动力学模型,根据各跟随车对应的目标控制律控制所述车队行驶。
30、达到上述目的,本发明第三方面实施例提出一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现如本发明第一方面实施例提出的自动驾驶车队控制方法。
31、为达到上述目的,本发明第四方面实施例提出一种控制器,包括存储器和处理器,所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现如本发明第一方面实施例提出的自动驾驶车队控制方法。
32、为达到上述目的,本发明第五方面实施例提出一种车辆,包括如本发明第四方面实施例提出的控制器。
技术特征:1.一种自动驾驶车队控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的自动驾驶车队控制方法,其特征在于,所述状态信息包括速度和加速度,根据所述头车数据包确定目标数据包,包括:
3.根据权利要求1所述的自动驾驶车队控制方法,其特征在于,所述信息序列m为:
4.根据权利要求1所述的自动驾驶车队控制方法,其特征在于,根据所述目标数据包和所述信息序列,确定各所述跟随车的目标控制律,包括:
5.根据权利要求3所述的自动驾驶车队控制方法,其特征在于,所述自动驾驶车队的动力学模型为:
6.根据权利要求5所述的自动驾驶车队控制方法,其特征在于,所述目标控制律为:
7.一种自动驾驶车队控制装置,其特征在于,所述装置包括:
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如权利要求1-6中任一项所述的自动驾驶车队控制方法。
9.一种控制器,包括存储器和处理器,所述存储器上存储有计算机程序,其特征在于,所述计算机程序被所述处理器执行时,实现如权利要求1-6中任一项所述的自动驾驶车队控制方法。
10.一种车辆,其特征在于,包括如权利要求9所述的控制器。
技术总结本发明提供一种车队控制方法、装置及存储介质、控制器、车辆,该方法包括:实时接收头车数据包,根据所述头车数据包确定目标数据包;获取各跟随车的传感器测得的信息序列,根据所述目标数据包和所述信息序列,确定各所述跟随车的目标控制律;利用自动驾驶车队的动力学模型,根据各跟随车对应的目标控制律控制所述车队行驶。该方法通过非线性系统状态估计算法进行延迟补偿,使得车队控制模型能够在无线通信存在延迟、丢包、乱序等不确定性因素时保持有效。技术研发人员:孙羽,宋玉中,惠一,楚玥玥受保护的技术使用者:奇瑞新能源汽车股份有限公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/149634.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。