一种汽车电泳涂装输送混联机构抗时变干扰控制方法
- 国知局
- 2024-07-30 09:29:39
本发明属于汽车电泳涂装,涉及一种汽车电泳涂装输送混联机构抗时变干扰控制方法。
背景技术:
1、为解决现有基于悬臂梁串联结构的电泳涂装输送设备存在承受重载荷能力较差、柔性化水平较低等问题,结合串、并联机构优势,研制了一种汽车电泳涂装输送混联机构,该机构具有工作空间大,灵活度、精度和刚度高等特点。但混联机构系统实际运行时不仅受时变匹配干扰因素影响,具体表现为机构关节摩擦力、建模误差,还受时变非匹配干扰因素影响,具体表现为机构末端负载汽车白车身所受液阻干扰。这些复杂干扰影响混联机构运动控制精度,甚至导致倾斜或颠覆,破坏系统稳定,使得混联机构的高性能运行成为控制研究领域存在的难点。
2、“张文杰,高国琴.喷砂除锈并联机构抗非匹配干扰自适应反步滑模控制”(张文杰,高国琴,软件导刊,2023年,第11期,第110-117页)一文中针对喷砂除锈并联机构系统存在射流反作用力非匹配干扰问题,设计了一种结合扩张状态观测器自适应反步滑模控制方法。文中通过引入辅助变量将具非匹配干扰状态方程重构成仅含匹配干扰状态方程,再利用eso对总匹配干扰估计,并基于干扰估计信息设计自适应反步滑模控制器以抑制非匹配干扰。但其扩张状态观测器不能实现对干扰导数的估计,因此不能解决混联机构系统的时变干扰问题,且系统状态只能在有限时间收敛到平衡点,存在依赖系统状态初始值的问题。
技术实现思路
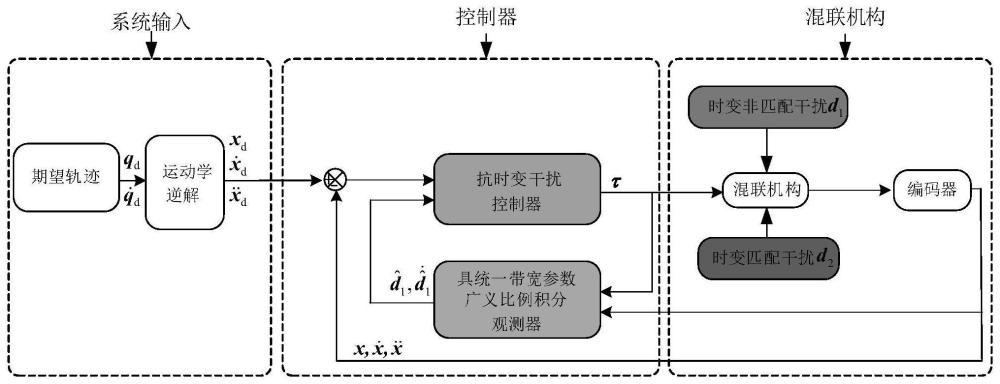
1、本发明为克服现有技术的不足,针对汽车电泳涂装输送混联机构,提出一种抗时变干扰控制方法。针对混联机构系统实际运行时受复杂干扰影响问题,本发明首先采用拉格朗日法建立关节空间下考虑时变匹配干扰和时变非匹配干扰因素的具时变干扰混联机构动力学模型;其次,在具时变干扰混联机构动力学模型的基础上,将时变非匹配干扰及其导数分别扩展为系统状态,得到动力学扩展状态空间方程,并基于该扩展状态空间方程设计一种具有统一带宽参数的广义比例积分观测器,以对时变非匹配干扰及其导数进行估计,并简化参数调优过程;然后,将时变非匹配干扰估计值引入到滑模变量设计中,以构建抗时变干扰控制的滑模面;最后,基于具时变干扰混联机构动力学模型、抗时变干扰控制的滑模面,结合时变非匹配干扰导数估计值,设计混联机构抗时变干扰控制器,进而提出一种混联机构抗时间干扰控制方法,以同时抑制时变匹配/非匹配干扰,提高系统鲁棒性,并加快系统收敛速度,实现系统固定时间内的快速稳定。
2、本发明的技术方案为:一种汽车电泳涂装输送混联机构抗时变干扰控制方法,包括如下步骤:
3、1)针对汽车电泳涂装输送混联机构,采用解析法对混联机构进行逆运动学分析,进一步求得雅可比矩阵;
4、2)采用拉格朗日法建立关节空间下考虑时变匹配和时变非匹配干扰因素的具时变干扰混联机构动力学模型;
5、3)基于步骤2)所建立的具时变干扰混联机构动力学模型,通过将时变非匹配干扰及其导数分别扩展为系统状态,建立混联机构动力学扩展状态空间模型,设计一种具有统一带宽参数的广义比例积分观测器,以对时变非匹配干扰及其导数进行估计;
6、4)基于步骤3)中时变非匹配干扰估计信息,将时变非匹配干扰估计值引入到滑模变量设计中,以构建抗时变干扰控制的滑模面;
7、5)基于步骤2、3、4)中设计的具时变干扰混联机构动力学模型、抗时变干扰控制的滑模面,结合时变非匹配干扰导数估计值,设计混联机构抗时变干扰控制器;
8、6)通过软件编程,实现一种汽车电泳涂装输送混联机构抗时变干扰控制。
9、进一步,所述步骤2)中,根据拉格朗日函数定义,考虑混联机构系统在运行过程中受包含摩擦力、建模误差的时变匹配干扰影响,建立关节空间下具时变干扰混联机构动力学模型:
10、
11、式中,m(x)为名义惯性矩阵;为名义哥氏力和离心力项;g(x)为名义重力项;dm(x)、dg(x)为建模误差;表示摩擦力项(单位为n·m);x、和分别为主动关节位姿、速度、加速度向量;τ为主动关节对应电机的驱动力矩(单位为n·m);
12、另考虑到液阻时变非匹配干扰直接作用于混联机构末端,影响末端位姿速度且与控制输入不在同一通道,易出现负载脱钩、倾斜或颠覆问题;为此,进一步建立关节空间下考虑时变匹配干扰与时变非匹配干扰的具时变干扰混联机构动力学模型:
13、
14、式中,x1为主动关节位姿向量;为主动关节位姿向量的导数;x2为主动关节速度向量;为主动关节加速度向量;f(x1,x2)=-m(x1)-1(c(x1,x2)x2+g(x1))为系统非线性固有动力学;b=m(x1)-1为惯性矩阵的逆矩阵;u=τ为电机驱动力矩(单位为n·m);d1为时变非匹配干扰,直接影响主动关节位姿向量与速度向量的导数关系,且与控制输入u处于不同通道;为包含关节摩擦、建模误差的集总时变匹配干扰项。
15、进一步,所述步骤4)中,还包括基于所设计的具时变干扰混联机构动力学模型,将时变非匹配干扰d1的第0、1阶导数分别扩展为系统状态x3、x4,得到混联机构动力学扩展状态空间模型为:
16、
17、式中,x3为时变非匹配干扰即x3=d1;x4为时变非匹配干扰导数即
18、设计具统一带宽参数广义比例积分观测器以估计时变非匹配干扰d1及其导数
19、
20、式中,分别为x1、x3、x4的估计值;为观测误差;wo为观测器带宽;l1,l2,l3为观测器增益参数且l1=3wo,l2=3wo2,l3=wo3。
21、进一步,所述步骤4)中,结合时变非匹配干扰估计值即设计抗时变干扰控制的滑模变量s=[s1,s2,s3,s4,s5,s6]t为:
22、
23、式中,m1、m2、αs、βs为可调参数且m1>1、0<m2<1、αs>0、βs>0;e为小的正常数;均为变增益参数;x1为主动关节位姿向量,xd为主动关节期望位姿向量,e=x1-xd为主动关节跟踪误差向量;为主动关节速度误差向量;l1(e)、l2(e)为基于主动关节跟踪误差向量所设计的切换项分段表达式;
24、进一步,所述步骤5)中,基于所设计的具时变干扰混联机构动力学模型和抗时变干扰控制的滑模面,结合时变非匹配干扰导数估计值即设计混联机构抗时变干扰控制器为:
25、
26、式中,m3、m4、αr、βr为可调参数且m3>1、0<m4<1、αr>0、βr>0;h>0为切换增益参数;为变增益参数;
27、进而在设计的抗时变干扰控制方法的作用下,系统状态在固定时间t1内到达滑模面,随后沿着滑模面在固定时间t2内收敛到残差集∑,因此系统在固定时间t内稳定,t£tmax=t1+t2;
28、
29、
30、
31、其中,残差集∑为系统状态收敛至平衡点附近的特定区域,t1为系统状态到达滑模面所需时间上界,t2为系统状态沿着滑模面收敛到残差集∑所需时间上界,t为系统稳定所需时间上界。
32、本发明首次提出一种汽车电泳涂装输送混联机构抗时变干扰控制方法,以实现汽车电泳涂装输送混联机构的高精度轨迹跟踪控制,其特点和有益效果是:
33、1、鉴于混联机构系统实际运行时受复杂干扰影响,采用lagrange法建立关节空间下考虑时变干扰与时变非匹配干扰因素的具时变干扰混联机构动力学模型;
34、2、基于所建立的具时变干扰混联机构动力学模型,通过将时变非匹配干扰及其导数分别扩展为系统状态,建立混联机构动力学扩展状态空间模型,设计一种具有统一带宽参数的广义比例积分观测器,以对时变非匹配干扰及其导数进行估计,并简化参数调优过程,并通过将干扰估计信息引入到滑模面设计中,以抑制时变非匹配干扰;
35、3、基于具时变干扰混联机构动力学模型,并结合时变非匹配干扰及其导数估计信息,设计一种抗时变干扰控制算法,以同时抑制时变匹配/非匹配干扰,提高系统鲁棒性并加快系统收敛速度,实现系统在固定时间内的快速稳定。因此,该方法在实际应用时能有效提高汽车电泳涂装输送混联机构的运动跟踪控制性能。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149629.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表