一种基于无人机库的无人机控制方法及系统与流程
- 国知局
- 2024-07-30 09:29:28
本发明涉及无人机,具体涉及一种基于无人机库的无人机控制方法及系统。
背景技术:
1、目前电网巡线系统,森林防火与救援、消防监测与救援、城市及大型场馆管理、地质灾害监测与救援、铁路公路监测与疏通以及人员密集场所的管理等等都需要使用无人机。而随着电网的覆盖范围不断增大,尤其是超高压电网的架设路径经常跨越山区等偏僻区域,作业人员在铁塔高处作业时,地面负责人为了监测作业人员的人身安全及作业安全,现阶段已经有采用无人机高空实时拍摄,地面负责人通过手机/电脑实时观看的方式。
2、但一般的无人机续航能力有限,不能远距离飞行,一般采用在车辆内安装升降平台运输无人机至指定位置后,无人机升空巡航。现有技术中的无人机起飞方法或流程均是基于简单的运输设备或机库来进行,到达部署地点后的起飞流程自动化程度较低,需要大量的人工参与,人工参与容易出错且效率较低;同时,返航时无人机根据飞行轨迹及自身定位进行回归,但是无人机通过雷达建模定位自身位置会随着巡航轨迹变化导致定位偏差越来越大,最终导致无人机返航时无法准确回归升降平台,无人机回归准确性较低;另外,为了使无人机更好地实现存储和升降自动化,各式各样的车载无人机库应运而生,但现有的车载无人机库通常无自动检测功能,而人工检测无人机库费时费力、容易遗漏故障点、工作效率低,无法为无人机起飞提供可靠的保障。
技术实现思路
1、本发明主要是为了解决现有的无人机巡检方案中无人机起飞流程自动化程度较低且返航时回归准确性较低,以及现有无人机库无自检功能的问题,提供了一种基于无人机库的无人机控制方法及系统,控制器根据接收的服务端指令,控制无人机库外部环境检测子系统、无人机库自检子系统和无人机自检子系统分别进行检测,实现无人机库外部环境检测、无人机库状态自检和无人机状态自检,为无人机起飞提供可靠保障;检测满足要求后,全自动调度无人机库进行起飞准备动作及无人机进行起飞动作和返航动作,实现无人机库、无人机自动化作业,避免人工参与导致出错及影响效率;通过无人机的红外接收单元接收无人机升降平台红外发射单元发射的红外光源,准确定位预设回归位置,实现准确降落,提高无人机回归的准确性。
2、为了实现上述目的,本发明采用以下技术方案。
3、一种基于无人机库的无人机控制方法,包括以下步骤:
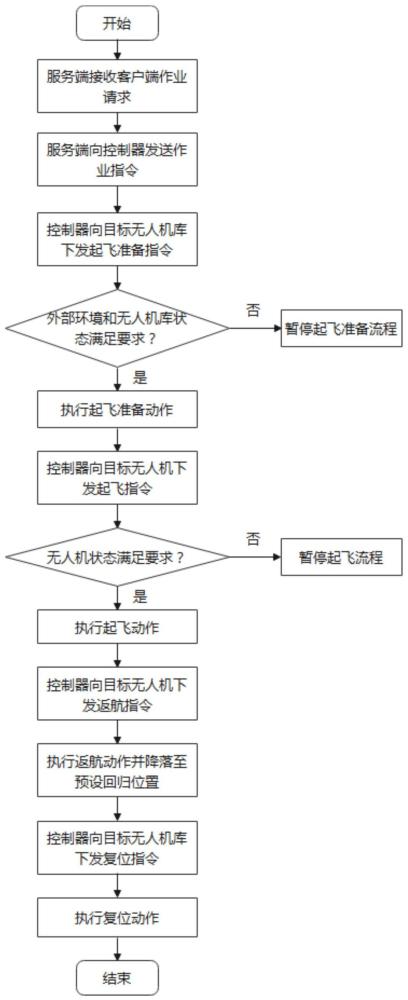
4、步骤s1:服务端接收来自客户端的待处理的作业请求,所述作业请求包括无人机库标识和无人机标识,控制器内置物联网卡,基于所述物联网卡对应的通信协议建立控制器与服务端之间的通信连接,所述通信协议包括mqtt协议;
5、步骤s2:控制器向所述无人机库标识对应的目标无人机库发送起飞准备指令,通过无人机库外部环境检测子系统检测目标无人机库外部环境,通过无人机库自检子系统检测目标无人机库状态,若所述目标无人机库外部环境和目标无人机库状态满足要求,则所述目标无人机库执行起飞准备动作,起飞准备动作依次包括平推仓门推出(打开)、上翻仓门打开、无人机升降平台上升、无人机升降平台推出以及抱夹解锁;
6、步骤s3:控制器向所述无人机标识对应的目标无人机发送起飞指令,起飞指令包括起飞时刻和目标航线,通过无人机自检子系统检测目标无人机状态,若所述目标无人机状态满足要求,则所述目标无人机执行起飞动作,在起飞时刻起飞并沿目标航线巡航,进行飞行任务;
7、步骤s4:控制器向所述目标无人机发送返航指令,返航指令包括返航航线和预设回归位置,所述目标无人机执行返航动作,沿返航航线返航并通过红外检测与分析技术准确降落至无人机升降平台的预设回归位置上,完成飞行任务。
8、本发明提供了一种基于无人机库的无人机控制方法,实现了一键触发无人机库和无人机的自动作业,在接收到作业请求后即可全自动调度无人机库和无人机,通过向目标无人机库、目标无人机发送指令,控制目标无人机库、目标无人机执行相应动作,直至目标无人机完成飞行任务并准确回归,有效提高了无人机库和无人机作业的自动化程度,保证无人机巡航作业的准确度和效率,解决了人工参与容易出错且效率较低的问题;通过无人机库外部环境检测子系统、无人机库自检子系统和无人机自检子系统分别对无人机库外部环境、无人机库状态和无人机状态进行检测,实现无人机库外部环境、无人机库和无人机全面检测,检测效率高、准确性好,为无人机起飞提供可靠保障,解决了人工检测费时费力、容易遗漏故障点、工作效率低的问题;通过无人机上的红外接收单元接收无人机升降平台上红外发射单元发出的红外光源,准确定位预设回归位置,有效提高了无人机回归的准确性。
9、作为优选,所述目标无人机上设置有红外接收单元,所述目标无人机库的无人机升降平台上设置有至少三个且不在同一直线上的红外发射单元,步骤s4还包括:
10、步骤d1:通过目标无人机的红外接收单元接收目标无人机库的红外发射单元发射的红外光源,实时检测目标无人机与目标无人机库之间的当前距离;
11、步骤d2:将所述当前距离与预设的距离阈值进行比较,若当前距离小于距离阈值,则执行步骤d3,否则返回步骤d1;
12、步骤d3:根据目标无人机的红外接收单元与目标无人机库的无人机升降平台的红外发射单元之间的红外距离信息,获得所述目标无人机与所述无人机升降平台的预设回归位置的相对位置信息;
13、步骤d4:根据所述相对位置信息,控制所述目标无人机降落在所述无人机升降平台的预设回归位置上。
14、本发明无人机设有红外接收单元,通过获取无人机升降平台的红外发射单元发出的红外光源,准确定位预设回归位置,有效提高了无人机回归的准确性,解决了无人机通过雷达建模定位自身位置会随着巡航轨迹变化导致定位偏差越来越大,最终导致无人机返航时无法准确回归升降平台,无人机回归准确性较低的问题。
15、作为优选,步骤d4的具体过程,包括以下步骤:
16、步骤e1:检测所述目标无人机的当前旋转角度;
17、步骤e2:根据所述当前旋转角度和预设回归角度,控制目标无人机进行旋转,直至目标无人机的当前旋转角度与所述预设回归角度一致,以回正目标无人机的姿态;
18、步骤e3:检测所述目标无人机的当前位置坐标;
19、步骤e4:根据所述当前位置坐标和预设回归坐标,控制目标无人机在当前水平面上进行平移,直至目标无人机的当前位置坐标与所述预设回归坐标在当前水平面上的投影重合,以使目标无人机移动至所述预设回归位置正上方;
20、步骤e5:控制所述目标无人机垂直下落至无人机升降平台的预设回归位置。
21、本发明通过上述步骤,有效回正无人机姿态并准确降落至预设回归位置。
22、作为优选,步骤s2中,所述检测目标无人机库外部环境和目标无人机库状态的具体过程,包括以下步骤:
23、步骤a1:对目标无人机库外部环境进行检测,获得目标无人机库外部环境参数,外部环境包括有无成为对无人机库、无人机与服务端进行连接的电波的妨碍的外部干扰、气温、风速、天气以及地磁的状况当中的至少一个;
24、步骤a2:对目标无人机库状态进行自检,包括电源检测、wifi检测、平衡稳定检测、开仓平移检测、开仓翻盖检测、平台升降检测和抱夹检测,获得目标无人机库状态参数;
25、步骤a3:判断目标无人机库外部环境参数及目标无人机库状态参数是否满足无人机起飞要求,若满足则目标无人机库执行起飞准备动作,否则暂停起飞准备流程,并将检测结果通过服务端反馈给客户端。
26、其中,电源检测主要是检测电流、电压是否稳定,电源储备的能量是否足够,车载后备充电模块是否运行正常;wifi检测主要是检测wifi是否开启正常,远程操控平台是否连接;平衡稳定检测主要是检测机库水平状态和汽车运行时的颠簸情况;开仓平移检测、开仓翻盖检测、平台升降检测主要是检测平移仓门、翻盖仓门、平台升降开启和关闭是否动作到位,电子推杆是否运行正常,在进行翻盖开仓时,前一项平移仓门动作是否完成,在进行平台升降时,前一项翻盖仓门动作是否完成;抱夹检测主要是检测抱夹开合功能是否有卡顿,夹力和压力是否正常,收放是否运行正常。
27、作为优选,步骤s3中,所述检测目标无人机状态的具体过程,包括以下步骤:
28、步骤b1:采集目标无人机的红外偏振图像和红外光强图像;
29、步骤b2:对目标无人机的红外偏振图像和红外光强图像进行去噪处理,获得去噪后的红外偏振图像和红外光强图像;
30、步骤b3:对去噪后的红外偏振图像和红外光强图像进行融合处理,获得目标无人机融合检测图像;
31、步骤b4:对目标无人机融合检测图像进行特征提取,获得所述目标无人机融合检测图像的颜色特征和纹理特征;
32、步骤b5:基于神经网络自学习方法,构建无人机状态自检模型;
33、步骤b6:通过所述无人机状态自检模型,将所述目标无人机融合检测图像的颜色特征和纹理特征与预存储的目标无人机正常状态时的颜色特征参数和纹理特征参数进行比对,若比对结果低于预设的门限值则目标无人机执行起飞动作,否则暂停起飞流程,并将检测结果通过服务端反馈给客户端。
34、其中,通过图像去噪处理技术提高图像质量,通过无人机状态自检模型实现无人机状态自检,比对结果是指目标无人机融合检测图像的颜色特征和纹理特征与预存储的目标无人机正常状态时的颜色特征参数和纹理特征参数的差值的绝对值,若该差值绝对值大于预设的门限值,则说明无人机状态异常,需要暂停起飞流程。
35、作为优选,步骤s3中,所述检测目标无人机状态的具体过程,还包括以下步骤:步骤c1:对目标无人机剩余电量进行检测,获得目标无人机剩余电量值;
36、步骤c2:根据目标无人机剩余电量值判断目标无人机剩余电量是否满足本次飞行任务要求,若满足则目标无人机执行起飞动作,否则暂停起飞流程。
37、本发明通过检测无人机剩余电量值,确保无人机完成飞行任务,避免无人机飞行途中由于电量不足影响执行飞行任务。
38、一种基于无人机库的无人机控制系统,采用上述的一种基于无人机库的无人机控制方法,包括控制器及与所述控制器电性连接的无人机库外部环境检测子系统、无人机库自检子系统和无人机自检子系统,所述无人机库外部环境检测子系统检测作业请求中无人机库标识对应的目标无人机库外部环境,并将目标无人机库外部环境参数反馈给所述控制器,所述无人机库自检子系统检测作业请求中无人机库标识对应的目标无人机库状态,并将目标无人机库状态参数反馈给控制器,所述无人机自检子系统检测作业请求中无人机标识对应的目标无人机状态,并将无人机状态自检模型比对结果和目标无人机剩余电量值反馈给控制器;所述控制器还分别与无人机库和无人机通信连续,向所述无人机库和所述无人机下发指令,控制无人机库和无人机工作。
39、本发明还提供了一种基于无人机库的无人机控制系统,包括控制器,控制器内置物联网卡,基于该物联网卡对应的通信协议建立服务端与控制器的通信连接,服务端接收客户端即远程操控平台的作业请求,根据该作业请求下发指令给对应的控制器,控制器根据该指令向目标无人机库发送起飞准备指令,同时控制目标无人机库对应的无人机库外部环境检测子系统和无人机库自检子系统开始检测并接收检测结果,根据该检测结果控制目标无人机库执行起飞准备动作;起飞准备完成后,控制器根据该指令向目标无人机发送起飞指令,同时控制目标无人机对应的无人机自检子系统开始检测并接收检测结果,根据检测结果控制目标无人机执行起飞动作,实现无人机库外部环境检测、无人机库状态自检和无人机状态自检,为无人机起飞提供可靠的保障;通过控制器下发指令,全自动调度无人机库和无人机作业,提高自动化水平。
40、作为优选,所述无人机库自检子系统包括主机plc模块及与所述主机plc模块电性连接的电源检测系统、wifi检测模块、平衡稳定检测模块、显示操作模块、开仓平移检测模块、开仓翻盖检测模块、平台升降检测模块和抱夹检测模块。
41、本发明通过无人机库自检子系统实现无人机库状态自检,解决了车载无人机库无自动检测功能或者人工自检不到位,不能为无人机起飞提供可靠的保障,存在人工检查、排查费时费力,找不到故障点,操控失误,工作效率低,起飞前存在故障等问题。
42、作为优选,所述无人机自检子系统包括控制模块及与所述控制模块电性连接的红外图像采集装置、图像去噪处理模块、图像融合处理模块、图像特征提取模块和无人机状态自检模型比对模块,所述控制模块还电性连接有无人机剩余电量检测模块。
43、本发明通过无人机自检子系统实现红外图像采集与处理,进而实现无人机状态自检以及无人机剩余电量检测,保障无人机顺利完成飞行任务。
44、作为优选,所述无人机库包括库体,所述库体包括底部、与所述底部围绕形成容置腔的侧壁以及与所述底部相对设置的开关门机构,所述容置腔划分为无人机存储空间、电控安装空间以及若干个电器件仓,所述无人机存储空间内设有无人机升降平台,无人机通过抱夹架设在所述无人机升降平台上,所述电控安装空间一侧设有气囊,所述若干个电器件仓包括依次布置的电池仓、控制仓和电源仓,所述电源仓一侧设有散热风扇,电池仓用于放置电池,控制仓用于放置控制器,电源仓用于放置电源,所述开关门机构包括上翻仓门和平推仓门,其中,所述平推仓门由平推仓门打开电机驱动打开或关闭,所述上翻仓门由上翻仓门打开电机驱动打开或关闭,所述无人机升降平台由平台升降电机驱动升降,所述无人机升降平台由平台推出电机驱动推出或回缩,所述抱夹由抱夹电机驱动锁紧或解锁,本发明所提供的无人机库由多个电机驱动各部件工作,多个电机分别与控制器连接,受控制器指令控制,实现无人机库自动化作业。
45、本发明还提供了一种车载无人机库,包括库体,所述库体包括底部、侧壁和开关门机构,所述底部、侧壁和开关门机构组成容置腔,所述容置腔包括无人机存储空间、电控安装空间、电池仓、控制仓和电源仓,所述无人机存储空间内设有无人机升降平台,所述无人机升降平台上通过抱夹架设有无人机,所述开关门机构包括上翻仓门和平推仓门;无人机库接收到起飞准备指令后,由平推仓门打开电机驱动推出(打开)平推仓门,然后由上翻仓门打开电机驱动打开上翻仓门,接着由平台升降电机驱动升起无人机升降平台,再由平台推出电机驱动推出无人机升降平台,最后由抱夹电机驱动解锁抱夹,完成起飞准备动作,结构简单、紧凑,实现无人机库自动化作业。
46、因此,本发明的优点是:
47、(1)实现一键触发无人机库和无人机的自动作业,在接收到作业请求后即可全自动调度无人机库和无人机,通过向目标无人机库、目标无人机发送指令,控制目标无人机库、目标无人机执行相应动作,直至目标无人机完成飞行任务,有效提高了无人机库和无人机作业的自动化程度,保证无人机巡航作业的准确度和效率,解决了人工参与容易出错且效率较低的问题;(2)无人机通过获取无人机升降平台的红外发射单元发出的红外光源,准确定位预设回归位置,有效提高了无人机回归的准确性,解决了无人机通过雷达建模定位自身位置会随着巡航轨迹变化导致定位偏差越来越大,最终导致无人机返航时无法准确回归升降平台,无人机回归准确性较低的问题;
48、(3)通过无人机库外部环境检测子系统、无人机库自检子系统和无人机自检子系统分别对无人机库外部环境、无人机库状态和无人机状态进行检测,实现无人机库外部环境、无人机库和无人机全面检测,检测效率高、准确性好,为无人机起飞提供可靠保障,解决了人工检测费时费力、容易遗漏故障点、工作效率低的问题;
49、(4)无人机库结构简单、紧凑,自动化程度高,有效提高无人机巡航效率和准确率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149613.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
无人搬运系统的制作方法
下一篇
返回列表