状态受限的CSTR自适应神经网络控制方法及系统与流程
- 国知局
- 2024-07-30 09:29:05
本发明涉及cstr控制,特别是指一种状态受限的cstr自适应神经网络控制方法及系统。
背景技术:
1、由于连续搅拌反应釜(continuously stirred tank reactor,cstr)内部化学反应放热过程的复杂性和非线性,导致系统模型存在严重的非线性与时变性,使得控制变得复杂。此外,釜内反应过程受到外部干扰的影响较敏感,增加了控制的难度。cstr中的化学反应过程由于反应条件、原料特性的复杂性,存在多个相互影响的变量,这将导致控制方向未知。同时,由于原料组成的变化、设备性能的波动或外部环境的干扰等因素,造成系统的参数(如温度、压力、流量等)在操作过程中发生动态变化,也将引起控制方向未知。现有的技术没有充分考虑上述非线性、时变性、外界未知干扰、控制方向未知、系统存在未建模动态等情况对系统的不利影响,导致控制效果一般,将会影响化学反应的速率、转化率和产物质量。
技术实现思路
1、为了避免上述因素对控制系统产生不利影响,本发明提出一种状态受限的cstr自适应神经网络控制方法及系统,建立了cstr模型,同时基于神经网络方法、障碍李雅普诺夫函数、nussbaum补偿技术提出了自适应神经网络状态受限控制器,确保系统对指令信号进行快速精确的跟踪。
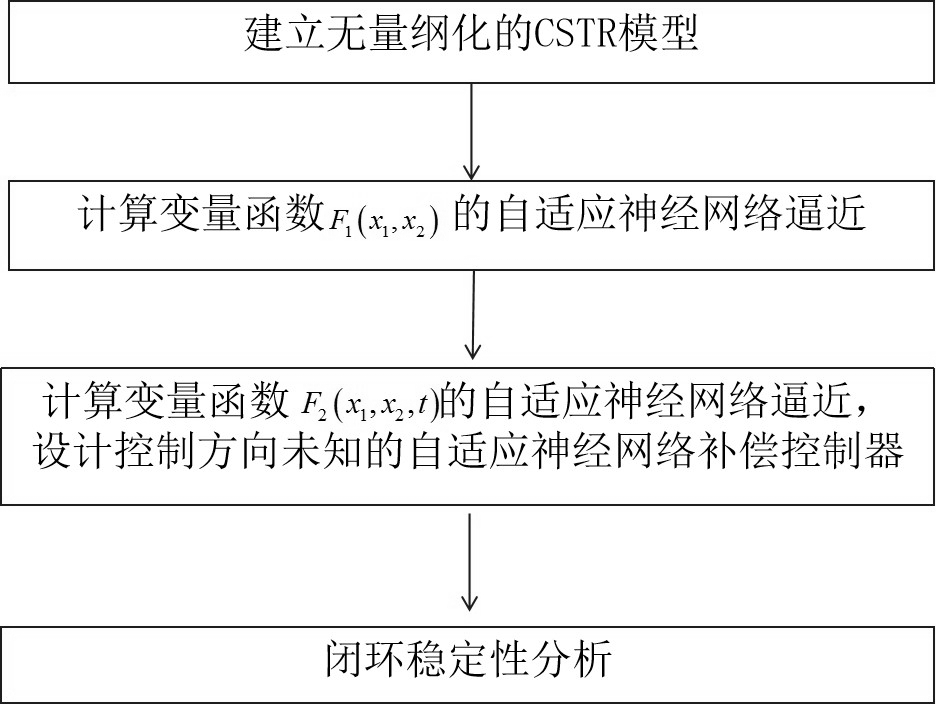
2、本发明的技术方案是这样实现的:状态受限的cstr自适应神经网络控制方法,包括以下步骤:
3、步骤1、建立无量纲化的cstr模型;
4、无量纲化的cstr模型方程如下:
5、 (1)
6、其中,为符号可变的未知有界时变函数,未知函数为模型无量纲温度干扰与未建模动态,未知函数和为建模过程中的未知非线性动态;与为非线性函数;变量为无量纲化浓度,;变量为无量纲化温度,;变量为无量纲化控制输入,,,为执行器输出的最大控制幅值;
7、步骤2、定义为跟踪误差,为时变理想信号;
8、定义如下对称barrier lyapunov函数
9、 (3)
10、其中为自然对数,设计参数为常数;
11、定义辅助控制变量、满足,定义变量函数为
12、 (4)
13、基于神经网络逼近方法,计算变量函数的自适应神经网络逼近;
14、步骤3、定义变量函数为
15、 (14)
16、基于神经网络逼近方法,计算变量函数的自适应神经网络逼近;
17、基于nussbaum补偿技术以及障碍李雅普诺夫函数,设计控制方向未知的自适应神经网络补偿控制器。
18、进一步地,步骤1中,非线性函数与具体定义如下:
19、 (2)
20、常量为达姆寇勒数,;常量为无量纲化活化能,;正常数为无量纲化传热系数,;常量为绝热温升系数,;常量为出口体积流速,变量为反应物浓度,变量为进口浓度,常量为指数因子,常量为活化能,常量为摩尔气体常数,变量为进口温度,变量为釜内的绝对温度,常量为连续搅拌反应釜体积,常量为反应热,变量为出口密度,常量为出口热容,变量为时间,常量为冷却剂温度,常量为传热系数,其中,变量、变量、变量、变量均为随时间t变化的变量。
21、进一步地,步骤2,计算变量函数的自适应神经网络逼近的方法如下:
22、2.1、对式(3)求导可得
23、 (5)
24、将的神经网络逼近形式定义为,为函数输入向量,利用神经网络方法对变量函数进行如下逼近:
25、 (6)
26、其中,为神经网络的理想权值向量,正整数表示该神经网络中所包含的神经元节点数量;为已知高斯径向基函数向量,,定义为
27、 (7)
28、其中,感受域中心为向量,感受域宽度为常量;为神经网络逼近误差,通过增加神经网络的神经元节点数量使其减小;
29、2.2、定义第二个李雅普诺夫函数
30、 (8)
31、其中,为理想权值向量的自适应估计值,为理想权值向量的估计误差;,为常数,;
32、设计辅助控制变量为:
33、 (9)
34、其中,设计参数为常数;
35、由式(5)、(6)、(8)和(9)可得
36、 (10)
37、设计自适应估计值的自适应律为
38、 (11)
39、其中,设计参数为常数
40、由式(6)和(11),得到变量函数的自适应神经网络逼近为
41、 (12)
42、由式(11)计算神经网络的理想权值向量的自适应估计值,进而利用式(12)计算变量函数的自适应神经网络逼近。
43、进一步地,步骤3中,计算变量函数的自适应神经网络逼近的方法如下:
44、3.1、定义第三个李雅普诺夫函数
45、 (13)
46、定义变量函数为
47、 (14)
48、由,以及式(13)、(14)、(1)和(2)可知
49、(15)
50、将变量函数的神经网络逼近形式定义为,为函数输入向量;
51、利用神经网络方法对变量函数进行如下逼近:
52、 (16)
53、式(16)中为神经网络的理想权值向量,正整数表示该神经网络中所包含的神经元节点数量;为已知高斯径向基函数向量,,定义为
54、 (17)
55、其中感受域中心为为向量,感受域宽度为为常量;为神经网络逼近误差,通过增加神经网络的神经元节点数量使其减小;
56、3.2、定义第四个李雅普诺夫函数
57、 (18)
58、其中,为理想权值向量的自适应估计值,为理想权值向量的估计误差;,为常数,;
59、设计辅助控制信号为:
60、 (19)
61、其中,设计参数为常数;
62、设计自适应估计值的自适应律为
63、 (20)
64、其中,设计参数为常数;
65、由式(16)和(20),得到变量函数的自适应神经网络逼近为
66、 (21)
67、由式(20)计算神经网络的理想权值向量的自适应估计值,进而利用式(21)计算变量函数的自适应神经网络逼近。
68、进一步地,步骤3中,计算设计控制方向未知的自适应神经网络补偿控制器的方法如下:
69、对于任意变量或常量,定义其nussbaum函数,满足:,;
70、设计无量纲化控制输入为
71、 (22)
72、其中,变量和为辅助控制信号;
73、设计辅助控制信号为
74、 (23)
75、其中,设计参数为常数;
76、利用式(19)、(23)计算辅助控制信号,进而利用式(22)计算无量纲化控制输入,无量纲化控制输入即为控制方向未知的自适应神经网络补偿控制器。
77、进一步地,还包括步骤4闭环稳定性分析
78、由式(15)、(16)、(18)、(19)、(22)和(23)得
79、(24)
80、定义常数为
81、 (25)
82、基于,根据杨氏不等式,由式(10)、(11)、(20)、(24)和(25)可知
83、 (26)
84、其中,为常数;
85、对式(26)的等号两侧同乘,并在区间积分可得:
86、 (27)
87、全局有界,则存在常数,满足
88、(28)
89、因此全局有界,结合式(27)可知
90、 (29)
91、由于,结合式(18)可知,
92、因此结合式(29)可知
93、 (30)
94、通过增大控制参数、使误差任意小。
95、一种状态受限的cstr自适应神经网络控制系统,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如所述的控制方法。
96、本发明的有益效果:
97、本发明基于神经网络方法、障碍李雅普诺夫函数、nussbaum补偿技术提出了自适应神经网络状态受限控制器,所设计的控制器能够确保系统外部存在未知干扰、内部存在未知非线性、控制方向未知时对指令信号进行快速精确的跟踪,同时可以使跟踪误差始终被限制在预设的边界内,具有更高的控制性能,应用范围更广。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149602.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表