一种远程驾驶车端设备系统的制作方法
- 国知局
- 2024-07-30 09:29:10
本技术涉及远程驾驶设备,特别涉及一种远程驾驶车端设备系统。
背景技术:
1、随着5g移动通信技术的成熟及普及,5g网络技术的大带宽、低延时、大联接的技术优势使基于5g通信的远程控制成为可能并逐步走进现实。
2、远程驾驶旨在打造一套软\硬件系统,可以在远程驾驶舱内,通过操控一套与真实汽车相似的驾驶硬件(包括但不限于:汽车座椅、方向盘、刹车、油门、换挡操作杆,高清显示器,舱端电脑等)利用5g网络低延时、高带宽的特性将车端控制器(专用远程控制器)采集的多路视频(4-8路1080p/720p),360环视视频及控制器从车端采集到车辆的挡位、速度、位置等车端信息传回远程驾舱端实时显示,舱端的控制套件通过5g网络(5g nsa/sa专网/公网),实时将油门,刹车,挡位等控车指令送达至车端,对车辆进行前进,转向,刹车,急停等远程控制,从而实现驾驶员在异地对车辆进行远程驾驶的目的。
3、在诸如:高危行业,特殊作业环境有广泛的应用前景。
4、然而,现有的远程驾驶技术,车端到云端,云端到设备端都存在一定的延时,实际的使用体验很不好。
5、因而现有技术还有待改进和提高。
技术实现思路
1、鉴于上述现有技术的不足之处,本实用新型的目的在于提供一种远程驾驶车端设备系统,各个层级之间的通讯过程更快速,极大的降低了端到端的通讯时延。
2、为解决以上技术问题,本实用新型采取了以下技术方案:
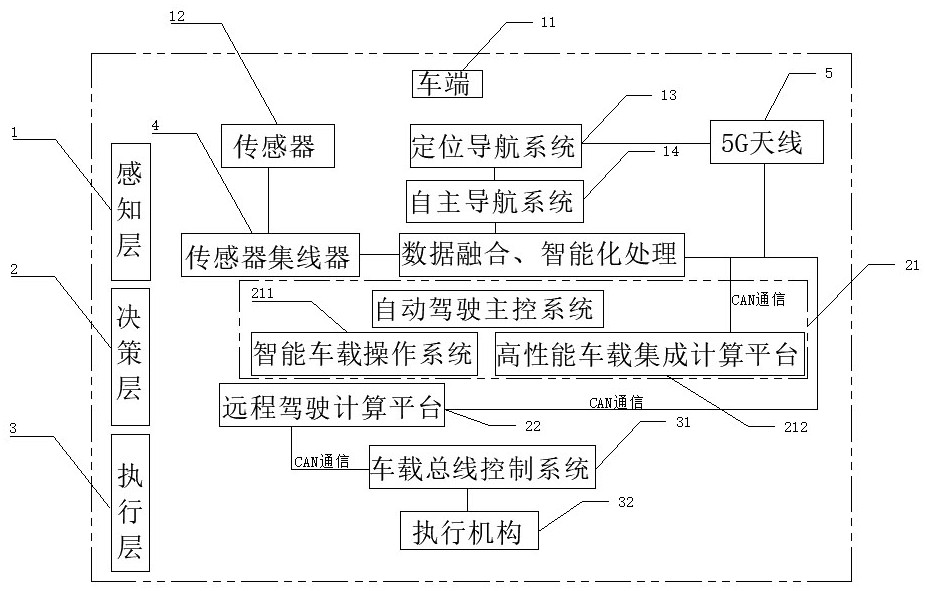
3、本实用新型提供了一种远程驾驶车端设备系统,包括:感知层、决策层以及执行层,所述感知层包括设置在车端的传感器、定位导航系统以及自主导航系统,所述决策层包括自动驾驶主控系统以及远程驾驶计算平台,所述执行层包括用于控制车端的车载总线控制系统以及执行机构,所述感知层与所述决策层通过can通信连接,所述执行层与所述决策层通过can通信连接。
4、所述的远程驾驶车端设备系统中,所述传感器包括设置在所述车端外侧的摄像头、激光雷达、毫米波雷达、超声波雷达、视觉传感器、红外传感器以及压力传感器。
5、所述的远程驾驶车端设备系统中,各个传感器通过传感器集线器融合连接。
6、所述的远程驾驶车端设备系统中,所述车端设备系统还包括设置在所述车端上方的5g天线。
7、所述的远程驾驶车端设备系统中,所述自动驾驶主控系统包括主控芯片,所述主控芯片上设置有通信模块、硬件接口以及电源。
8、所述的远程驾驶车端设备系统中,所述自动驾驶主控系统还包括整车控制器,所述整车控制器与所述主控芯片can通信连接。
9、所述的远程驾驶车端设备系统中,所述整车控制器与所述远程驾驶计算平台can通讯连接。
10、所述的远程驾驶车端设备系统中,所述自动驾驶主控系统还包括智能车载操作系统和高性能车载集成计算平台。
11、所述的远程驾驶车端设备系统中,所述执行机构包括油门、刹车以及转向。
12、相较于现有技术,本实用新型公开了一种远程驾驶车端设备系统,包括:感知层、决策层以及执行层,所述感知层包括设置在车端的传感器、定位导航系统以及自主导航系统,所述决策层包括自动驾驶主控系统以及远程驾驶计算平台,所述执行层包括用于控制车端的车载总线控制系统以及执行机构,所述感知层与所述决策层通过can通信连接,所述执行层与所述决策层通过can通信连接,本实用新型所提供的一种远程驾驶车端设备系统,各个设备层级之间通过can通讯连接,通讯效率高,通过高速编解码,同时支持5g网络,接口种类齐全,满足高速视频传输,有效的降低了数据传输延时的风险。
技术特征:1.一种远程驾驶车端设备系统,其特征在于,包括:感知层、决策层以及执行层,所述感知层包括设置在车端的传感器、定位导航系统以及自主导航系统,所述决策层包括自动驾驶主控系统以及远程驾驶计算平台,所述执行层包括用于控制车端的车载总线控制系统以及执行机构,所述感知层与所述决策层通过can通信连接,所述执行层与所述决策层通过can通信连接。
2.根据权利要求1所述的远程驾驶车端设备系统,其特征在于,所述传感器包括设置在所述车端外侧的摄像头、激光雷达、毫米波雷达、超声波雷达、视觉传感器、红外传感器以及压力传感器。
3.根据权利要求2所述的远程驾驶车端设备系统,其特征在于,各个传感器通过传感器集线器融合连接。
4.根据权利要求1所述的远程驾驶车端设备系统,其特征在于,所述车端设备系统还包括设置在所述车端上方的5g天线。
5.根据权利要求1所述的远程驾驶车端设备系统,其特征在于,所述自动驾驶主控系统包括主控芯片,所述主控芯片上设置有通信模块、硬件接口以及电源。
6.根据权利要求5所述的远程驾驶车端设备系统,其特征在于,所述自动驾驶主控系统还包括整车控制器,所述整车控制器与所述主控芯片can通信连接。
7.根据权利要求6所述的远程驾驶车端设备系统,其特征在于,所述整车控制器与所述远程驾驶计算平台can通讯连接。
8.根据权利要求5所述的远程驾驶车端设备系统,其特征在于,所述自动驾驶主控系统还包括智能车载操作系统和高性能车载集成计算平台。
9.根据权利要求8所述的远程驾驶车端设备系统,其特征在于,所述高性能车载集成计算平台与所述主控芯片can通信连接。
10.根据权利要求1所述的远程驾驶车端设备系统,其特征在于,所述执行机构包括油门、刹车以及转向。
技术总结本技术公开了一种远程驾驶车端设备系统,包括:感知层、决策层以及执行层,所述感知层包括设置在车端的传感器、定位导航系统以及自主导航系统,所述决策层包括自动驾驶主控系统以及远程驾驶计算平台,所述执行层包括用于控制车端的车载总线控制系统以及执行机构,所述感知层与所述决策层通过CAN通信连接,所述执行层与所述决策层通过CAN通信连接,本技术所提供的一种远程驾驶车端设备系统,各个设备层级之间通过CAN通讯连接,通讯效率高,通过高速编解码,同时支持5G网络,接口种类齐全,满足高速视频传输,有效的降低了数据传输延时的风险。技术研发人员:谢萌,高建翔,徐东东受保护的技术使用者:城市之光(深圳)无人驾驶有限公司技术研发日:20240110技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/149607.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。