一种基于空间网格码的无人机协同编队方法
- 国知局
- 2024-07-30 09:28:57
本发明属于无人机,尤其涉及一种基于空间网格码的无人机协同编队方法。
背景技术:
1、北斗网格位置码是在地球空间剖分理论基础上发展起来的、适用于北斗卫星导航系统各种应用终端输出的一种网格位置编码,它与以geosot模型为基础的相关编码体系同根同源、一脉相承,设计上与北斗卫星导航系统(包括增强系统)的定位精度相适应,同时兼顾人和设备的使用,是经纬度点位置编码体系的重要补充。将它作为以北斗卫星导航系统为代表的定位导航授时(pnt)体系的一种基本输出,为万事万物的区域位置赋值,目的是在信息链的最前端实现全球空间位置网格化和一维整形数的统一标识和表达,从而为大数据条件下的各种应用提供更好、更便捷的空间信息基础服务,提高地球空间位置数据的组织、处理、分析、传递和运用效率。北斗网格位置码的层级为a)第一级网格划分:第一级网格根据gb/t13989-2012中1:100万图幅进行划分,单元大小是6°×4°;b)第二级网格划分:将第一级6°×4°网格,按照经纬度等分,分成12×8个第二级网格,对应于30′×30′网格,约等于地球赤道处55.66km×55.66km网格;c)第三级网格划分:将第二级网格,按照经纬度等分,分成2×3个第三级网格,对应于1:5万地图图幅15′×10′网格,约等于地球赤道处27.83km×18.55km网格;d)第四级网格划分:将第三级网格,按照经纬度等分,划分成15×10个第四级网格,约等于地球赤道处1.85km×1.85km网格;e)第五级网格划分:将第四级网格,按照经纬度等分,划分成15×15个第五级网格,约等于地球赤道处123.69m×123.69m网格;f)第六级网格划分:将第五级网格,按照经纬度等分,划分成2×2个第六级网格,约等于地球赤道处61.84m×61.84m网格;g)第七级网格划分:将第六级网格,按照经纬度等分,划分成8×8个第七级网格,约等于地球赤道处7.73m×7.73m网格。
2、目前无人机集群协同问题较为复杂,如果协同出问题,会出现碰撞风险,因此需要实现无人机集群的快速相互定位、协同定位。
技术实现思路
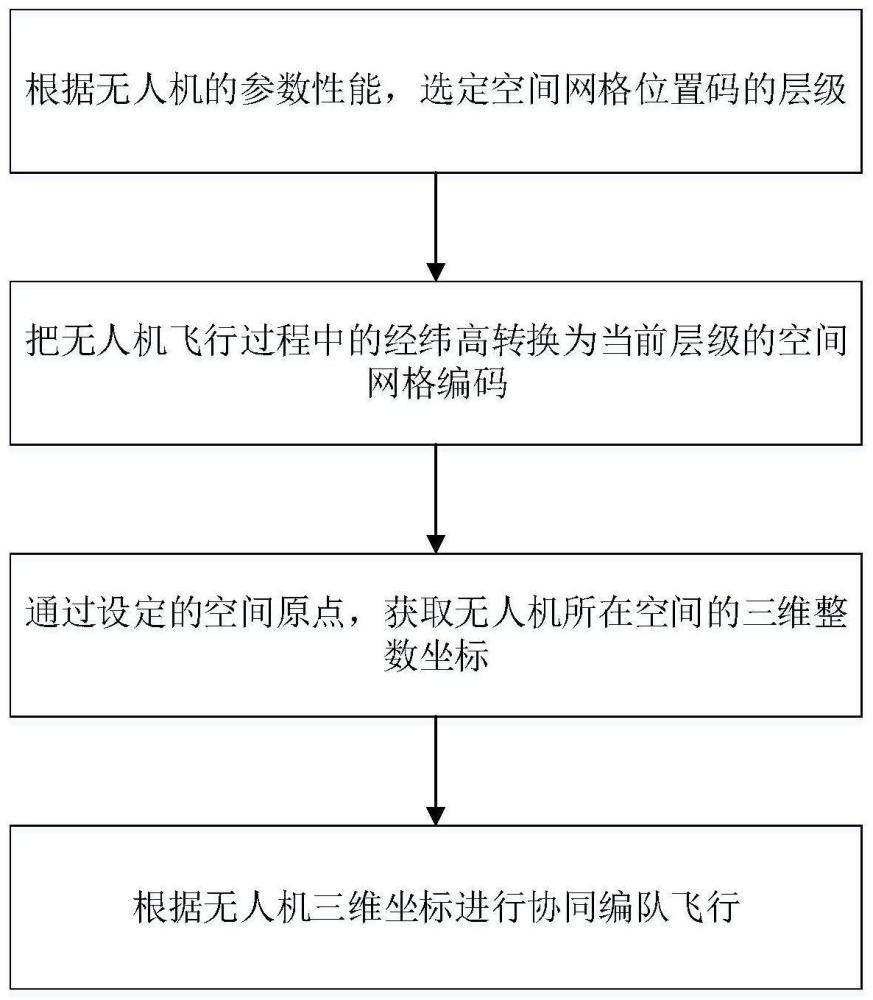
1、有鉴于此,本发明提供一种基于空间网格码的无人机集群协同方法,首先根据无人机的参数性能,选定空间网格位置码的层级;其次把无人机飞行过程中的经纬高转换为当前层级的空间网格编码;接着通过设定的空间原点,获取无人机所在空间的三维整数坐标;最后根据无人机三维坐标进行协同编队。
2、为实现上述目的,本发明公开的一种基于空间网格码的无人机协同编队方法,包括以下步骤:
3、根据无人机的参数性能,选定空间网格位置码的层级;
4、将无人机飞行过程中的经纬高转换为当前层级的空间网格编码;
5、通过设定的空间原点,获取无人机所在空间的三维整数坐标;
6、根据无人机三维坐标进行协同编队。
7、优选地,根据无人机的参数性能,选定空间网格位置码的层级,包括:
8、设置无人机自身参数:无人机半径为r1,无人机的飞行安全距离l1;
9、采集传感器误差:采集卫星导航传感器的经纬度误差el,高度计的误差h1,陀螺仪对应的距离误差i1;
10、计算总误差:er=r1+l1+el+h1+i1;
11、空间网格位置码层级:空间网格码的层级n,尺寸为ln,er<ln<2*er;
12、二进制三维空间编码:采用空间网格编码方式,由于只用了n层,因此空间网格码n层以下的编码都去掉,以减少编码bit数。
13、优选地,将无人机飞行过程中的经纬高转换为当前层级的空间网格编码;通过设定的空间原点,获取无人机所在空间的三维整数坐标,其具体步骤为:
14、将经纬高转换为空间网格编码:采用空间网格码的方式把每架无人机的经纬高转换为当前层级的空间网格编码;
15、设置空间原点:设置长机为空间坐标原点(0,0,0);
16、计算僚机坐标:通过僚机空间网格码与长机空间网格码相减,获取僚机坐标相对于长机坐标为(xi,yi,zi),其中(xi,yi,zi)为整数。
17、优选地,根据无人机三维坐标进行协同编队采用的方式为:
18、进行期望编队:僚机相对于长机的期望编队三维整数坐标为(xi0,yi0,zi0),其中i0∈(2~n),n为无人机的数目,i0=1为长机,长机的坐标为(0,0,0);
19、进行实际编队:实际飞行中僚机相对于长机的三维整数坐标为(xi1,yi1,zi1),其中i1∈(2~n),n为无人机的数目;
20、计算损失值:第i驾无人机实际编队与期望编队的损失值(xi1-xi0,yi1-yi0,zi1-zi0),无人机集群总损失值为
21、计算无人机防撞值:两两无人机防撞值为其中j为第j驾无人机;
22、计算曼哈顿距离:为了减少计算量采用曼哈顿距离代替距离,损失值变为loss2=|xi1-xi0|+|yi1-yi0|+|zi1-zi0|,无人机防撞值变为lc2=|xi1-xj1|+|yi1-yj1|+|zi1-zj1|;
23、无人机的飞行控制:修改僚机的飞行位置,使得每两架无人机的lc2>1,且使得损失值loss2最小。
24、优选地,空间网格码采用北斗网格位置码、geosot三维网格编码、引入高度的uber的h3网格编码之一。
25、本发明的有益效果如下:
26、本发明主要是针对无人机集群协同复杂的问题,以空间网格码代替经纬高的方式,实现快速无人机集群协同定位、打击、规划和避障研究
技术特征:1.一种基于空间网格码的无人机协同编队方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于空间网格码的无人机协同编队方法,其特征在于,根据无人机的参数性能,选定空间网格位置码的层级,包括:
3.根据权利要求1所述的基于空间网格码的无人机协同编队方法,其特征在于,将无人机飞行过程中的经纬高转换为当前层级的空间网格编码;通过设定的空间原点,获取无人机所在空间的三维整数坐标,其具体步骤为:
4.根据权利要求1所述的基于空间网格码的无人机协同编队方法,其特征在于,根据无人机三维坐标进行协同编队采用的方式为:
5.根据权利要求1所述的基于空间网格码的无人机协同编队方法,其特征在于,空间网格码采用北斗网格位置码、geosot三维网格编码、引入高度的uber的h3网格编码之一。
技术总结本发明公开了一种基于空间网格码的无人机协同编队方法,包括以下步骤:根据无人机的参数性能,选定空间网格位置码的层级;将无人机飞行过程中的经纬高转换为当前层级的空间网格编码;通过设定的空间原点,获取无人机所在空间的三维整数坐标;根据无人机三维坐标进行协同编队。本发明针对无人机集群协同复杂的问题,以空间网格码代替经纬高的方式,实现快速无人机集群协同定位、打击、规划和避障。技术研发人员:曾向荣,刘煜,张茂军,周文,肖华欣,张政,钟志伟,喻岚受保护的技术使用者:中国人民解放军国防科技大学技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/149589.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表