一种就地热再生机群无人驾驶系统及其控制方法与流程
- 国知局
- 2024-07-30 09:28:57
本发明涉及一种就地热再生机群无人驾驶系统及其控制方法,属于无人驾驶。
背景技术:
1、在工程机械领域,由于施工场景的特殊性,对自动驾驶技术的需求更加明显,且相较于私家车更容易实现技术的落地使用。
2、近年来,压路机、矿卡等工程机械领域在利用无人驾驶技术实现工地的无人化施工场景,取得了一定的进展。对于道路养护领域,由于道路处于非封闭状态,施工车辆与社会车辆并存,机群进行无人驾驶的过程中,对车辆的控制及安全防护要求极高。当运行中的无人驾驶设备出现故障后,如不能及时妥善处理,将会引发极大的安全隐患。目前,对于道路养护的机群无人驾驶系统及其控制亟需研究。
技术实现思路
1、本发明的目的在于提供一种就地热再生机群无人驾驶系统及其控制方法,该系统及控制方法能够提高道路养护机群无人驾驶设备的使用安全性及运行效率。
2、为了实现上述目的,本发明提供一种就地热再生机群无人驾驶系统,包括定位单元、车载显示单元、车载控制单元、车辆通讯单元和后台控制单元,所述定位单元、车载显示单元、车载控制单元、车辆通讯单元均与后台控制单元连接;
3、所述的定位单元用于提供机群行驶路径的基准坐标和地图信息,并将群行驶路径的基准坐标和地图信息传送至后台控制单元,生成当前车辆的坐标、目标位置以及行驶轨迹;
4、所述的车载显示单元用于显示当前车辆的基础信息,包括车辆行驶速度、坐标信息、行驶轨迹以及与任务轨迹的偏差、车辆信号强度和车身控制信息;
5、所述的车载控制单元用于根据当前车辆坐标及车身姿态、车辆行驶轨迹及车辆自身模型尺寸对车辆进行横向控制,保证车辆沿指定姿态进行行驶;
6、所述的车辆通讯单元用于建立车辆与车辆之间、车辆与后台控制单元之间的通讯连接,传递车辆之间的相互位置信息、车辆自身的状态信息,包括车辆行驶速度、车辆与后台控制单元的信号强度、定位系统相关信息;
7、所述的后台控制单元用于接收定位单元、车辆通讯单元传送的机群行驶路径的基准坐标、地图信息以及车辆之间的相互位置信息、车辆自身的状态信息,并对接收到的信息进行分析和处理,并将处理后的信息通过车载显示单元进行显示,同时将生成的任务路径下发至机群中各车辆的车载控制单元,并检查机组状态,状态正常的情况下启动车辆无人驾驶。
8、进一步地,所述的车载控制单元对车辆进行横向控制是指根据事先采集的路径信息及车辆实时定位信息,执行车辆路径跟踪控制算法,采用离散形式的pid控制算法,算法模型为:
9、
10、其中,u(k)是每个循环周期的控制输出,e(k)是每个循环周期的期望输出与实际输出的误差,j是求和变量,δt是循环周期的时间间隔,e(j)是累计误差值;kp,ki,kd是常数,分别对应比例系数、积分系数及微分系数,其取值分别为5≤kp≤40、1≤ki≤10、1≤kd≤10。
11、进一步地,所述的车载显示单元还用于对车辆自身设定车辆编号,所述车辆编号用于在机群无人驾驶系统中对车辆进行管理。
12、进一步地,所述的车辆与车辆之间的通讯是指每辆车与其相邻的两辆车之间建立通讯连接。
13、进一步地,所述的后台控制单元通过手持平板采集路径信息并生成当天的任务路径,利用局域网将任务下发至每辆车的车载控制单元;在手持平板上对每辆车id进行车辆信息绑定,根据车辆的实际施工工艺对车辆进行编队、根据现场施工要求调节车间距设置、设定特殊工况,并检查机群状态,若正常则通过手持端或者车载控制器启动车辆无人驾驶。
14、一种就地热再生机群无人驾驶系统的控制方法,包括如下步骤:
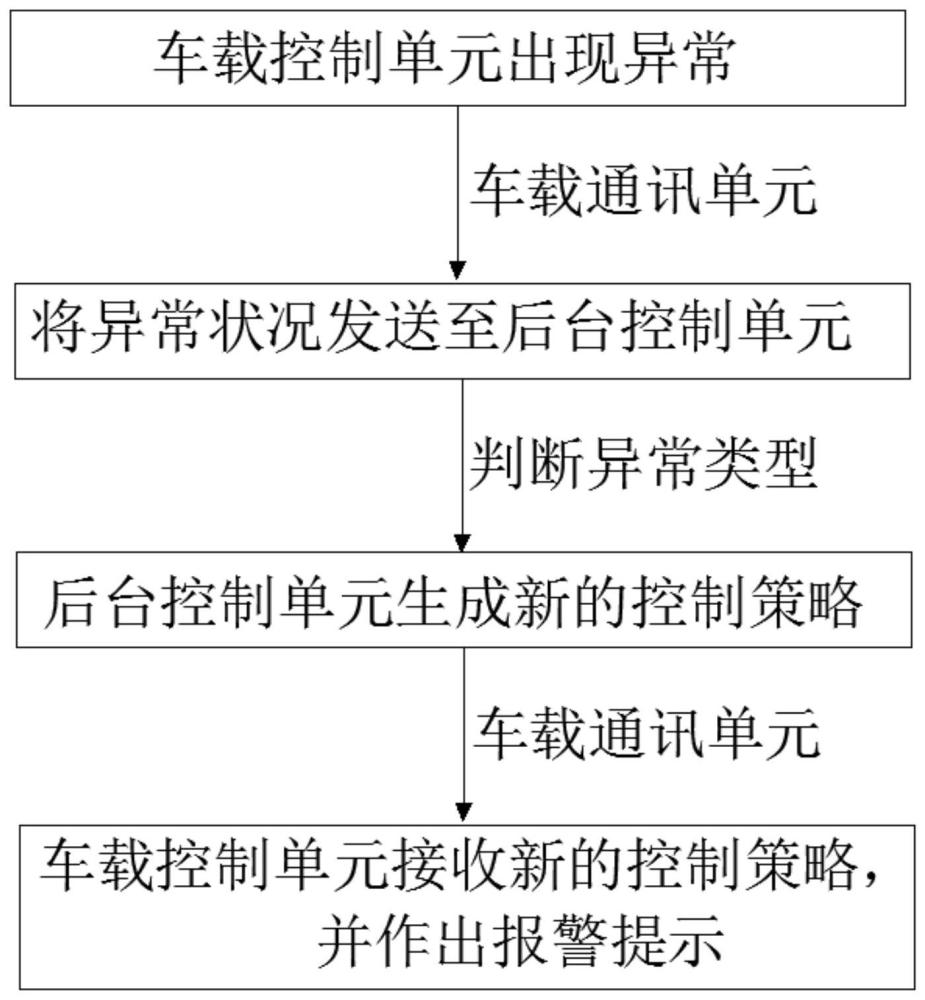
15、step 1、后台控制单元获取定位单元反馈的机群各车辆自身的定位数据信息、车速信息、车距信息以及车辆惯导解算的定位信息、车速信息以及车距信息数据,进行比对后,对无人驾驶状态进行判断,当判断为异常状态时,进行异常类型的确定;
16、step 2、当车辆自身定位单元连续在设定的时间内无法获取卫星数据、轮速计或液压传感器反馈故障代码、惯导数据出现跳变及中断,判断为为硬件系统故障,获取所述硬件系统所属的设备id信息,将该id信息传送至后台控制单元,后台控制单元将该设备从机群无人驾驶控制系统中进行移除,并继续执行机群无人驾驶策略;
17、step 3、当系统运行过程中出现数据传输中断、延迟或超时现象,所述异常类型判断为通讯故障,获取所述通讯故障所属的设备id信息,检查该设备自身无人驾驶系统是否存在其他异常情况;
18、若该设备无人驾驶系统仅存在与主控平台的通讯异常,则将该设备移除机群无人驾驶系统,但是该设备保留单车无人驾驶功能继续执行当前任务;若该设备同时存在其他控制问题,则将该设备的控制权限变为人工驾驶,同时移除机群无人驾驶系统,直至维修完成再加入机群无人驾驶系统;
19、step 4、当所述异常类型为软件故障时,立即停止机群无人驾驶行为,并通过警报提示提醒车辆管理人员转为人工控制,待软件维护完毕后,再次启动机群无人驾驶系统。
20、进一步地,所述步骤step 2中所述的机群无人驾驶策略包括:
21、(1)更新各车辆的状态,方程如下:
22、xi(t+1)=f(xi(t),ui(t))
23、其中,f是描述车辆动态行为的函数,它根据当前状态xi(t)和控制输入ui(t)预测下一时刻状态xi(t+1);
24、车辆运动学模型为:
25、
26、其中,点f为控制参考点,l为车辆的轴间距,α和β分别为前轮和后轮的转角,vf为前轮的行驶速度,γ为车身与x轴之间的夹角,又称为航向角;vx表示沿x方向的速度、vy表示沿y方向的速度、表示车辆旋转角速度;
27、(2)异常状态检测,根据公式:
28、
29、其中,h是以车辆当前状态为输入后输出的的表示异常程度的值,threshold是预设的阈值,当不满足h(xi(t))≤threshold时,输出异常提示;
30、(3)控制条件为:
31、
32、所述控制条件为找到最优的控制输入u(t),最小化代价函数minu(t)j(x(t),u(t));
33、(4)控制执行为:
34、
35、其中,是通过解决优化问题得到的最优控制输入,它将作为实际的控制命令发送给车辆i的车载控制单元。
36、进一步地,所述步骤step 2中的设定时间为3~7秒。
37、本发明通过设置定位单元、车载显示单元、车载控制单元、车辆通讯单元和后台控制单元,后台控制单元获取定位单元反馈的机群各车辆自身的定位数据信息、车速信息、车距信息以及车辆惯导解算的定位信息、车速信息以及车距信息数据,进行比对后,对无人驾驶状态进行判断,当判断为异常状态时,进行异常类型的确定;当车辆自身定位单元连续在设定的时间内无法获取卫星数据、轮速计或液压传感器反馈故障代码、惯导数据出现跳变及中断,判断为为硬件系统故障,获取所述硬件系统所属的设备id信息,将该id信息传送至后台控制单元,后台控制单元将该设备从机群无人驾驶控制系统中进行移除,并继续执行机群无人驾驶策略;当系统运行过程中出现数据传输中断、延迟或超时现象,所述异常类型判断为通讯故障,获取所述通讯故障所属的设备id信息,检查该设备自身无人驾驶系统是否存在其他异常情况,若该设备无人驾驶系统仅存在与主控平台的通讯异常,则将该设备移除机群无人驾驶系统,但是该设备保留单车无人驾驶功能继续执行当前任务;若该设备同时存在其他控制问题,则将该设备的控制权限变为人工驾驶,同时移除机群无人驾驶系统,直至维修完成再加入机群无人驾驶系统,当所述异常类型为软件故障时,立即停止机群无人驾驶行为,并通过警报提示提醒车辆管理人员转为人工控制,待软件维护完毕后,再次启动机群无人驾驶系统,极大地提高了道路养护机群无人驾驶设备的使用安全性和运行效率,填补了道路养护领域的无人驾驶空白。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149587.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表