一种CPT原子钟伺服器芯片的数字控制系统
- 国知局
- 2024-07-30 09:31:19
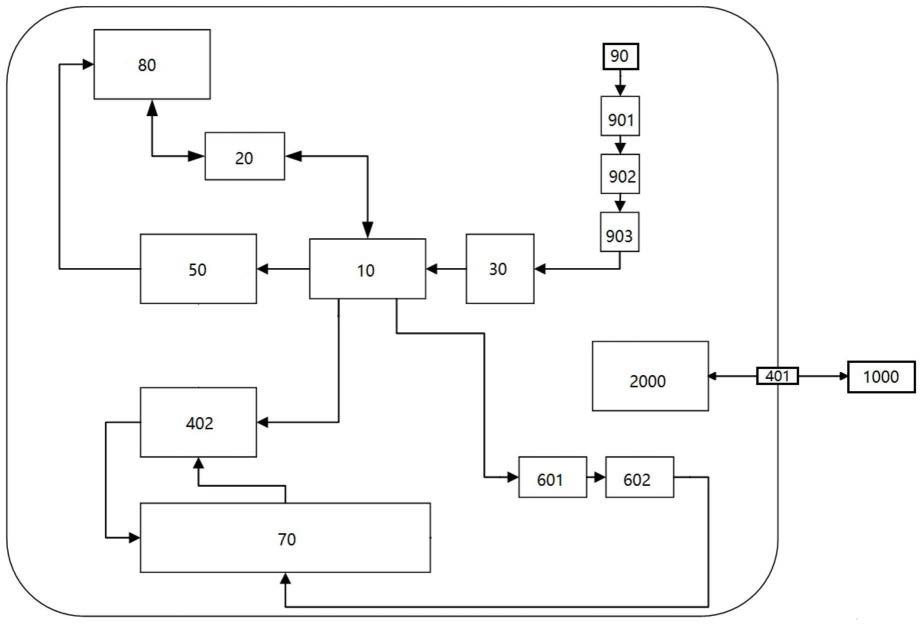
一种cpt原子钟伺服器芯片的数字控制系统技术领域1.本发明涉及集成电路技术领域,尤其涉及一种cpt原子钟伺服器芯片的数字控制系统。背景技术:2.cpt原子钟是利用原子的相干布局囚禁原理而实现的一种新型原子钟,由于不再需要微波谐振腔,因此可以做到真正的微型化。cpt原子钟被认为可以集成到一个芯片上,因此也被称为芯片尺度原子钟,国内也称之为芯片级原子钟。其是迄今为止能够用电池供电长时间工作的唯一的一种原子钟。它在导航定位、计时、同步通信等领域有着广泛的应用前景。3.目前cpt原子钟的伺服器芯片中,由于温度、偏置电流以及晶振调谐电压等都需要采用pid调节方式控制,并且还需要对偏置电流、微波信号的解调结果等进行扫描,因此需要有较多的寄存器和运算单元,且pid运算单元需要较高的运算速度,但由于数据量较大,扫描量大,pid运算耗时较长,最终导致整个伺服器芯片的数字控制部分功耗和面积较大。技术实现要素:4.本发明提供一种cpt原子钟伺服器芯片的数字控制系统,提出了一种降低整个伺服器芯片的数字控制部分的功耗和面积的技术方案。5.第一方面提供一种cpt原子钟伺服器芯片的数字控制系统,所述数字控制系统包括:数据处理模块、温度控制模块、解调模块、spi串口模块以及偏置电流控制模块;6.所述温度控制模块与所述数据处理模块和物理系统分别连接,用于采样所述物理系统的实际温度,并根据所述数据处理模块发送的温度控制字,控制所述物理系统的实际温度达到目标温度;7.所述解调模块与光检测器和所述数据处理模块分别连接,用于对所述光检测器的输出电流的两个调制信号分别进行解调,将解调后的结果发送至所述数据处理模块,所述解调后的结果包括:第一解调结果、第二解调结果;8.所述偏置电流控制模块与所述数据处理模块和所述物理系统分别连接,用于根据所述数据处理模块发送的电流控制字,控制所述物理系统的偏置电流;9.所述spi串口模块包括:主机和从机,所述主机用于所述数据处理模块和所述微波频率合成器芯片之间的数据通信,所述从机用于所述cpt原子钟伺服器芯片与上位机之间的数据通信;10.所述数据处理模块包括:pid运算处理子模块、以及扫描子模块;11.所述扫描子模块用于对对所述第一解调结果和所述第二解调结果进行扫描,并基于所述第一解调结果和所述第二解调结果各自的最值,运算得到所述第一解调结果和所述第二解调结果各自的中位值及其对应控制字;12.所述pid运算处理子模块接收所述实际温度、所述第一解调结果、所述第二解调结果以及第一相差,并分时复用加法器和乘法器并行进行pid运算,分别得到所述温度控制字、所述电流控制字、电压控制字以及第一相差的一阶差分pid运算数据,其中,所述电压控制字用于对数模转换器进行控制,进而控制压控晶体振荡器进行调整,以调整调谐电压,所述第一相差的一阶差分pid运算数据用于微波频率合成芯片进行外秒同步与驯服。13.可选地,所述温度控制模块包括:两个温度传感器、选择器、温度模数转换器以及温度数模转换器;14.两个所述温度传感器分别设置于所述物理系统的不同位置,且根据预设模式单独工作或者同时工作,采集所述物理系统的实际温度,并将采集的所述物理系统的实际温度传输至所述选择器;15.若任一温度传感器单独工作,则工作的温度传感器将采集的所述物理系统的实际温度,发送所述选择器;16.若两个所述温度传感器同时工作,则两个所述温度传感器将各自采集的所述物理系统的实际温度,发送所述选择器;17.若任一温度传感器单独工作,则所述选择器向所述温度模数转换器,发送工作的温度传感器采集的所述物理系统的实际温度;18.若两个所述温度传感器同时工作,则所述选择器向所述温度模数转换器,交替发送两个所述温度传感器分别采集的所述物理系统的实际温度;19.所述温度模数转换器接收所述实际温度并进行模数转换,并将模数转换后的实际温度发送给所述pid运算处理子模块;20.所述温度数模转换器接收所述温度控制字并进行数模转换,并基于数模转换后的结果,控制所述物理系统的实际温度达到所述目标温度。21.可选地,所述pid运算处理子模块接收所述实际温度、所述第一解调结果、所述第二解调结果以及第一相差,并分时复用加法器和乘法器并行进行pid运算,分别得到所述温度控制字、所述电流控制字、所述电压控制字、所述同步指令以及所述频率控制字的具体方法包括:22.所述pid运算处理子模块求取所述实际温度与所述目标温度的温度差值;23.所述pid运算处理子模块利用pid运算公式进行pid运算,并在运算过程中基于所述温度差值,分时复用加法器和乘法器,得到所述温度控制字;24.所述pid运算处理子模块求取所述第一解调结果与目标偏置电流的电流差值;25.所述pid运算处理子模块利用所述pid运算公式进行pid运算,并在运算过程中基于所述电流差值和所述第一解调结果的中位值,分时复用加法器和乘法器,得到所述电流控制字;26.所述pid运算处理子模块求取所述第二解调结果与目标电压的电压差值;27.所述pid运算处理子模块利用所述pid运算公式进行pid运算,并在运算过程中基于所述电压差值和所述第二解调结果的中位值,分时复用加法器和乘法器,得到所述电压控制字;28.所述pid运算处理子模块接收所述第一相差,所述第一相差来自于所述微波频率合成器芯片;29.所述pid运算处理子模块利用所述pid运算公式进行pid运算,并在运算过程中基于所述第一相差,分时复用加法器和乘法器,得到所述同步指令以及所述频率控制字。30.其中,所述pid运算公式为:31.δ=ki*e[n]+kp*d[n]+kd*(d[n]-d[n-1])[0032]e[n]表示所述温度差值或者所述电流差值或者所述电压差值或者所述第一相差,d[n]表示e[n]的当前值与其历史值之间的差值;[0033]定义所述pid运算的公式分为6个状态,在6个时钟内完成所述pid运算;[0034]在第1个时钟内,调用减法器运算得到所述温度差值;[0035]在第2个时钟内,调用乘法器运算ki*e[n],同时复用减法器运算得到d[n];[0036]在第3个时钟内,调用减法器运算得到d[n]-d[n-1],同时复用乘法器运算得到kp*d[n],同时将e[n]赋值给e[n-1];[0037]在第4个时钟内,调用乘法器运算得到kd*(d[n]-d[n-1]),同时复用加法器运算得到ki*e[n]+kp*d[n];[0038]在第5个时钟内,调用加法器运算得到δ,同时将d[n]赋值给d[n-1];[0039]在第6个时钟内,调用加法器运算得到u[n]=u[n-1]+d,其中u[n]表示所述电压控制字或者所述电流控制字或者所述温度控制字。[0040]可选地,所述数字控制系统还包括:第一比较器、第二比较器、第三比较器;所述解调后的结果还包括:第三解调结果、第四解调结果;[0041]所述第一比较器用于比较所述温度差值和温度误差阈值,并根据比较结果确定是否输出温度稳定标志;[0042]所述第二比较器用于比较第三解调结果和激光锁定阈值,并根据比较结果确定是否输出激光锁定标志,所述第三解调结果为所述第一解调结果的二次边带幅度;[0043]所述第三比较器用于比较第四解调结果和整机锁定阈值,并根据比较结果确定是否输出整机锁定标志,所述第四解调结果为所述第二解调结果的二次边带幅度。[0044]可选地,所述第一比较器比较所述温度差值和所述温度误差阈值,若在预设连续长度内,所述温度差值均小于所述温度误差阈值,则所述第一比较器确定输出所述温度稳定标志;[0045]所述第二比较器比较所述第三解调结果和所述激光锁定阈值,若在所述预设连续长度内,所述第三解调结果均大于所述激光锁定阈值,则所述第二比较器确定输出所述激光锁定标志;[0046]所述第三比较器比较所述第四解调结果和所述整机锁定阈值,若在所述预设连续长度内,所述第四解调结果均大于所述整机锁定阈值,则所述第三比较器确定输出所述整机锁定标志。[0047]可选地,所述第一比较器、所述第二比较器、所述第三比较器各自进行比较的过程中,各自的对比结果均由中间寄存器进行存储,并通过连乘的形式实现了步长比较,从而确定是否各自输出各自对应的标志。[0048]可选地,所述温度稳定标志、所述激光锁定标志、所述整机锁定标志均通过所述spi串口模块进行读取。[0049]可选地,所述解调模块接收经跨阻放大器、线性放大器、模数转换器处理后的输出电流;[0050]所述解调模块通过计数器定时进行解调处理,并通过所述spi串口模块比对相位对应的计数器的值,和理想值进行比较,从而得到第二相位差;[0051]所述解调模块基于所述第二相位差,对所述输出电流的两个调整信号分别进行解调,并通过所述spi串口模块将所述解调后的结果输入所述数据处理模块。[0052]可选地,所述扫描子模块通过第四比较器对所述偏置电流大小、所述第一解调结果大小和所述第二解调结果大小的判断,并基于所述第一解调结果和所述第二解调结果各自的最值,通过移位运算,得到所述第一解调结果和所述第二解调结果各自的中位值。[0053]可选地,所述扫描子模块通过移位运算,得到所述第一解调结果和所述第二解调结果各自的中位值的具体方法包括:[0054]以所述第一解调结果为例:[0055]基于第一寄存器存储解调数据的最大值;[0056]基于第二寄存器存储解调数据的最小值;[0057]基于第三寄存器存储解调数据对应控制字的最大值;[0058]基于第四寄存器存储解调数据对应控制字的最小值;[0059]在第1状态内,将第一个解调数据及其对应控制字分别存储至四个寄存器;[0060]在第2个状态内,对接收到的每一个新解调数据与第一个解调数据进行比较;[0061]若新解调数据大于第一个解调数据,则将新解调数据存储至所述第一寄存器,同时存储新解调数据的对应控制字于所述第三寄存器中,且计数器加一;[0062]若新解调数据小于第一个解调数据,则将新解调数据存储至所述第二寄存器,同时存储新解调数据的对应控制字于所述第四寄存器中,且所述计数器加一;[0063]当所述计数器的值达到预设扫描点数时,扫描结束,进行移位计算,得到所述第一解调结果的中位值。[0064]本发明提供的数字控制系统,温度控制模块用于采样物理系统的实际温度,并根据数据处理模块发送的温度控制字,控制物理系统的实际温度达到目标温度;解调模块用于对光检测器的输出电流的两个调整信号分别进行解调,将解调后的结果发送至数据处理模块。偏置电流控制模块用于根据数据处理模块发送的电流控制字,控制物理系统的偏置电流;spi串口模块包括:主机和从机,主机用于数据处理模块和微波频率合成器芯片之间的数据通信,从机用于cpt原子钟伺服器芯片与上位机之间的数据通信。[0065]数据处理模块包括:pid运算处理子模块、以及扫描子模块;扫描子模块用于对对第一解调结果和第二解调结果进行扫描,并基于第一解调结果和第二解调结果各自的最值,运算得到第一解调结果和第二解调结果各自的中位值及其对应控制字;pid运算处理子模块接收实际温度、第一解调结果、第二解调结果以及第一相差,并分时复用加法器和乘法器进行pid运算,分别得到温度控制字、电流控制字、电压控制字以及第一相差的一阶差分pid运算数据,其中,电压控制字用于对压控晶体振荡器进行调整,进而调整调谐电压,第一相差的一阶差分pid运算数据用于微波频率合成芯片进行外秒同步与驯服。[0066]本发明实现cpt原子钟伺服器芯片本身功能之外,pid运算处理子模块分时复用加法器和乘法器进行pid运算,缩短了pid运算的时间,提高了pid运算的速度,并且共用一个扫描字模块对偏置电流、微波等进行扫描,降低了寄存器数量以及运算单元的数量。两者综合起来,从整体上降低了整个伺服器芯片数字控制部分的功耗,缩减了整个伺服器芯片数字控制部分的的面积。附图说明[0067]为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。[0068]图1是本发明实施例的cpt原子钟伺服器芯片的数字控制系统的模块化示意图;[0069]图2是本发明实施例中温度传感器单独工作时的结构示意图;[0070]图3是本发明实施例中温度传感器共同工作时的结构示意图;[0071]图4是本发明实施例中pid运算公式进行pid运算时的状态转移示意图;[0072]图5是本发明实施例中扫描子模块的状态转移示意图。具体实施方式[0073]下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。[0074]参照图1,示出了本发明实施例的cpt原子钟伺服器芯片的数字控制系统的模块化示意图,数字控制系统包括:数据处理模块10、温度控制模块20、解调模块30、spi串口模块40以及偏置电流控制模块50。[0075]温度控制模块20与数据处理模块10和物理系统80分别连接,温度控制模块20用于采样物理系统80的实际温度,并根据数据处理模块10发送的温度控制字,控制物理系统80的实际温度达到目标温度。解调模块30与光检测器90和数据处理模块10分别连接,解调模块30用于对光检测器90的输出电流的两个调制信号分别进行解调,将解调后的结果发送至数据处理模块10。一般情况下,光检测器90的输出电流是由一个直流叠加了两个调制信号组合而成,两个调制信号分别是1khz和125hz,经过解调后的结果包括:第一解调结果、第二解调结果,第一调解结果即为1khz的一次边带解调结果,第二解调结果即为125hz的一次边带解调结果。[0076]偏置电流控制模块50与数据处理模块10和物理系统80分别连接,用于根据数据处理模块10发送的电流控制字,控制物理系统80的偏置电流。spi串口模块40包括:主机和从机,主机用于数据处理模块10和微波频率合成器芯片70之间的数据通信,从机用于cpt原子钟伺服器芯片与上位机之间的数据通信,一般上位机是mcu,当然可以为其它上位机。微波频率合成器芯片70用于接收外秒输入,并根据上位机发送的同步指令和频率控制字,控制外秒同步与驯服。[0077]本发明实施例中,cpt原子钟伺服器芯片的基本启动流程为,开始工作时,首先需要利用pid运算来控制物理系统80的实际温度与目标温度之间的差值稳定在设定阈值范围内,在实际温度稳定与目标温度之间差值温度在设定阈值范围之后,产生温度稳定标志(高电平)。之后利用pid运算来控制物理系统80的偏置电流持续高于激光锁定阈值,在物理系统80的偏置电流持续高于激光锁定阈值之后,产生激光锁定标志(高电平)。最后利用pid运算来控制微波频率合成器芯片70的调谐电压持续高于整机锁定阈值,在微波频率合成器芯片70的调谐电压持续高于整机锁定阈值之后,产生整机锁定标志(高电平)。当这三个标志均产生后,cpt原子钟伺服器芯片启动完成,可以进入正常工作。[0078]一种优选的示例:spi串口模块40包括:一个从机401和一个主机402,从机401工作模式为半双工mode0,每次传输32bit,其中从高位到低位依次为2bit命令、8bit地址、22bit数据。主机402工作模式为为半双工mode0,每次传输16bit,其中从高位到低位依次为2bit命令、6bit地址、8bit数据。其中从机401用来进行跟上位机1000进行通信,在数字控制系统内有用户接口2000实现数据交互。主机402用来跟微波频率合成器芯片70进行通信。[0079]温度控制模块20可以通过对温控ad采样结果进行处理,通过pid计算将物理系统80的温度稳定在想要控制的温度。偏置电流控制模块50可以为vcsel偏置电流控制模块,通过对光探测器90的输出电流经线性放大并ad采样之后的1khz边带进行pid处理,以实现vcsel偏置电流控制,同时1khz二次边带解调用作整机锁定指示。[0080]数据处理模块10通过对光探测器90的输出电流经线性放大并ad采样之后的125hz边带进行pid处理,同时125hz二次边带解调结果用作整机锁定指示,并产生调制所需要的125hz方波。[0081]数据处理模块10通过主机402接收微波频率合成器芯片70发送的1pps相差数据(即第一相差),并对该数据进行处理,然后发送第一相差的一阶差分pid运算数据,用于微波频率合成器芯片70完成1pps同步与频率驯服。[0082]本发明实施例中,数据处理模块10包括:pid运算处理子模块101、以及扫描子模块;一个扫描子模块,其用于对对第一解调结果和第二解调结果进行扫描,并基于第一解调结果和第二解调结果各自的最值,运算得到第一解调结果和第二解调结果各自的中位值及其对应控制字。一个pid运算处理子模块,其可以包含运算单元:加法器和乘法器。其接收实际温度、第一解调结果、第二解调结果以及第一相差,并分时复用加法器和乘法器,并行进行pid运算,分别得到温度控制字、电流控制字、电压控制字以及第一相差的一阶差分pid运算数据。[0083]为了更清楚的说明本发明的数字控制系统,以下针对温度、偏置电流以及调谐电压三个方面分别说明。[0084]温度控制模块20包括:两个温度传感器201、202、选择器203、温度模数转换器204以及温度数模转换器205。[0085]其中,两个温度传感器201、202分别设置于物理系统80的不同位置,且根据预设模式分为单独工作或者同时工作,这种单独工作或者同时工作的方式,提高了温度处理的准确性,且可以适应多种复杂情况。可以理解的是,单独工作是指温度传感器201工作,且温度传感器202不工作。或者是温度传感器201不工作,且温度传感器202工作。而同时工作是指温度传感器201工作,且温度传感器202也工作。[0086]两个温度传感器201、202均采集物理系统80的实际温度,并将采集的物理系统80的实际温度传输至选择器203;若任一温度传感器单独工作,则工作的温度传感器将采集的物理系统80的实际温度发送选择器203;自然地,若两个温度传感器同时工作,则两个温度传感器将各自采集的物理系统80的实际温度发送所述选择器203。[0087]若任一温度传感器单独工作,则选择器203向温度模数转换器204发送工作的温度传感器采集的物理系统80的实际温度;温度模数转换器204接收实际温度并进行模数转换,并将模数转换后的实际温度发送给pid运算处理子模块;pid运算处理子模块进行分时并行pid运算后输出温度控制字到温度数模转换器205,温度数模转换器205可以为16bitdac。温度传感器201单独工作时的结构示意图可以参见图2所示。[0088]参照图3,示出了同时工作时的结构示意图。若两个温度传感器同时工作,则选择器203向温度模数转换器204,交替发送两个温度传感器分别采集的物理系统80的实际温度;温度模数转换器204接收实际温度并进行模数转换,并将模数转换后的实际温度发送给pid运算处理子模块;pid运算处理子模块进行分时并行pid运算后输出温度控制字到温度数模转换器205。无论是哪种工作情况,最后温度数模转换器205接收温度控制字并进行数模转换,并基于数模转换后的结果,控制物理系统80的实际温度达到目标温度。[0089]图4示例性的示出了pid控制的功能框图。图4中ta表示目标值(目标温度、目标偏置电流、目标调谐电压),an表示温度实际值或者第一解调结果或者第二解调结果,pid运算处理子模块求取两者差值为e[n],pid运算处理子模块利用pid运算公式进行pid运算,并在运算过程中基于温度差值e[n],分时复用加法器和乘法器,得到运算结果为d[n],再对u[n-1]进行修正,最终得到温度控制字输出至温度数模转换器205。需要说明的是,u[n-1]的初始值均为0,对于温度以及第一相差进行pid运算的过程中,u[n-1]的值始终为0,而对于偏置电流和调谐电压进行pid运算的过程中,u[n-1]的初始值为0,之后u[n-1]的值为解调结果的中位值。[0090]其中,所述pid运算公式为:[0091]δ=ki*e[n]+kp*d[n]+kd*(d[n]-d[n-1])[0092]e[n]表示所述温度差值或者所述电流差值或者所述电压差值或者所述第一相差,d[n]表示e[n]的当前值与其历史值之间的差值;[0093]定义所述pid运算的公式分为6个状态,在6个时钟内完成所述pid运算;[0094]在第1个时钟内,调用减法器运算得到所述温度差值;[0095]在第2个时钟内,调用乘法器运算ki*e[n],同时复用减法器运算得到d[n];[0096]在第3个时钟内,调用减法器运算得到d[n]-d[n-1],同时复用乘法器运算得到kp*d[n],同时将e[n]赋值给e[n-1];[0097]在第4个时钟内,调用乘法器运算得到kd*(d[n]-d[n-1]),同时复用加法器运算得到ki*e[n]+kp*d[n];[0098]在第5个时钟内,调用加法器运算得到δ,同时将d[n]赋值给d[n-1];[0099]在第6个时钟内,调用加法器运算得到u[n]=u[n-1]+d,其中u[n]表示所述电压控制字或者所述电流控制字或者所述温度控制字。[0100]上述pid运算公式进行pid运算时的状态转移示意图为图4,6个时钟分别用s1~s6表示,s7表示将当前值赋予历史值,且输出本轮运算完成标志,继续新的一轮运算。[0101]类似的,对于控制偏置电流来说,pid运算子模块需要首先获得解调结果,解调模块30需要接收光探测器90的输出电流;光探测器90的输出电流需要经跨阻放大器901、线性放大器902、模数转换器903处理后,传输至解调模块30。[0102]解调模块30通过计数器定时进行解调处理,并通过spi串口模块40比对相位对应的计数器的值,和理想值进行比较,从而得到第二相位差;解调模块30基于第二相位差,对输出电流的两个调整信号(1khz、125hz)分别进行解调,并通过spi串口模块40将解调后的结果输入数据处理模块10。采用该算法同时减少了该模块的面积。其中1khznco每周期16个点方波,2khznco每周期8个点方波,整体解调通过+1/-1与采样值实现。1khznco相移范围-180°~180°,分辨率22.5°,2khz nco相移范围-180°~180°,分辨率45°,125hz nco每周期16个点方波,250hz nco每周期8个点方波,125hz nco相移范围-180°~180°,分辨率22.5°,250hz nco相移范围-180°~180°,分辨率45°,nco相移通过spi串口模块40读写。[0103]得到解调结果后,pid运算处理子模块求取第一解调结果与目标偏置电流的电流差值;pid运算处理子模块利用pid运算公式进行pid运算,并在运算过程中基于电流差值和第一解调结果的中位值,分时复用加法器和乘法器,得到电流控制字。与上述同样的pid公式,不同的仅是e[n]表示的是电流差值,不是温度差值也不是电压差值。[0104]调谐电压也一样,pid运算处理子模块求取第二解调结果与目标调谐电压的电压差值;pid运算处理子模块利用pid运算公式进行pid运算,并在运算过程中基于电压差值和第二解调结果的中位值,分时复用加法器和乘法器,得到电压控制字。电压控制字用于对数模转换模块601控制,再由数模转换模块601控制压控晶体振荡器602进行调整,进而调整调谐电压。[0105]上述两个中位值,都是扫描子模块通过第四比较器对偏置电流大小、第一解调结果大小和第二解调结果大小的判断,并基于第一解调结果和第二解调结果各自的最值,通过移位运算得到的。这种方式避免了加法器、除法器等的使用,省去了部分运算单元。参照图5示出了扫描子模块的状态转移示意图。[0106]结合图5,以第一解调结果为例:[0107]基于第一寄存器data_max存储解调数据的最大值;基于第二寄存器data_min存储解调数据的最小值;基于第三寄存器f_max存储解调数据对应控制字的最大值;基于第四寄存器f_min存储解调数据对应控制字的最小值;[0108]在第1状态内,将第一个解调数据及其对应控制字分别存储至四个寄存器;[0109]在第2个状态内,对接收到的每一个新解调数据与第一个解调数据进行比较;[0110]在第3个状态内,输出最终结果;[0111]若新解调数据大于第一个解调数据,则将新解调数据存储至第一寄存器data_max,同时存储新解调数据的对应控制字于第三寄存器f_max中,且计数器加一;[0112]若新解调数据小于第一个解调数据,则将新解调数据存储至第二寄存器data_min,同时存储新解调数据的对应控制字于第四寄存器f_min中,且计数器加一;[0113]当计数器的值达到预设扫描点数时,扫描结束,进行移位计算,得到第一解调结果的中位值。data_out就是其中位值,f_out就是其中位值对应的控制字,scan_down为扫描完成标志位。[0114]同样的pid公式,不同的仅是e[n]表示的是电压差值,不是温度差值,也不是电流差值。[0115]类似的还有外秒同步与驯服,pid运算处理子模块接收第一相差,第一相差来自于微波频率合成器芯片70。pid运算处理子模块利用pid运算公式进行pid运算,并在运算过程中基于第一相差,分时复用加法器和乘法器,得到第一相差的一阶差分pid运算数据。[0116]当有外秒输入的情况下,微波频率合成器芯片70对相差进行测量,得到第一相差,并将第一相差测量的结果发送给pid运算子模块进行处理,得到第一相差的一阶差分pid运算数据,再发送给微波频率合成器芯片70,由微波频率合成器芯片70基于第一相差的一阶差分pid运算数据实现外秒的同步和频率驯服。这种方式提高了外秒同步驯服的准确性,也保证了对1pps相移控制的稳定度。[0117]本发明实施例中,对于温度稳定标志、激光锁定标志、整机锁定标志的产生,由三个比较器实现。数字控制系统还包括:第一比较器、第二比较器、第三比较器;第一比较器用于比较温度差值和温度误差阈值,并根据比较结果确定是否输出温度稳定标志;第一比较器比较温度差值和温度误差阈值,若在预设连续长度内,温度差值均小于温度误差阈值,则第一比较器确定输出温度稳定标志。[0118]第二比较器用于比较第三解调结果和激光锁定阈值,并根据比较结果确定是否输出激光锁定标志,第三解调结果为第一解调结果的二次边带幅度。如第一解调结果为1khz的解调结果,那么第三解调结果即为1khz的二次边带幅度2khz的解调结果。第二比较器比较第三解调结果和激光锁定阈值,若在预设连续长度内,第三解调结果均大于激光锁定阈值,则第二比较器确定输出激光锁定标志。[0119]第三比较器用于比较第四解调结果和整机锁定阈值,并根据比较结果确定是否输出整机锁定标志,第四解调结果为第二解调结果的二次边带幅度。如第二解调结果为125hz的解调结果,那么第四解调结果即为125hz的二次边带幅度250hz的解调结果。上述温度稳定标志、激光锁定标志、整机锁定标志均通过spi串口模块40进行读取。[0120]第一比较器、第二比较器、第三比较器各自进行比较的过程中,各自的对比结果均由中间寄存器进行存储,并通过连乘的形式实现了步长比较,从而确定是否各自输出各自对应的标志。[0121]通过上述实施例,本发明的数字控制系统,扫描子模块用于对对第一解调结果和第二解调结果进行扫描,并基于第一解调结果和第二解调结果各自的最值,运算得到第一解调结果和第二解调结果各自的中位值及其控制字;pid运算处理子模块接收实际温度、第一解调结果、第二解调结果以及第一相差,并分时复用加法器和乘法器进行pid运算,分别得到温度控制字、电流控制字、电压控制字、第一相差的一阶差分pid运算数据。[0122]本发明实现cpt原子钟伺服器芯片本身功能之外,pid运算处理子模块分时复用加法器和乘法器进行pid运算,缩短了pid运算的时间,提高了pid运算的速度,并且共用一个扫描字模块对偏置电流、微波等进行扫描,降低了寄存器数量以及运算单元的数量。两者综合起来,从整体上降低了整个伺服器芯片数字控制部分的功耗,缩减了整个伺服器芯片的面积。[0123]需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。[0124]上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149758.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表