基于星-地超长基线干涉测量的世界时UT1测定方法
- 国知局
- 2024-07-30 09:35:16
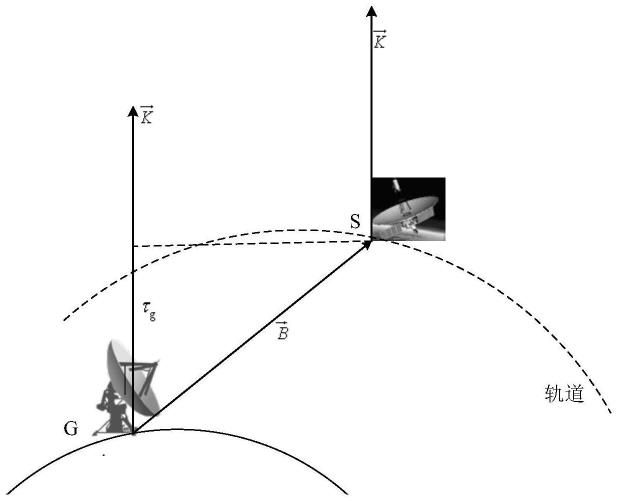
基于星-地超长基线干涉测量的世界时ut1测定方法技术领域1.本发明属于卫星授时技术领域,具体涉及一种基于星-地超长基线干涉测量的世界时ut1测定方法。背景技术:2.世界时(universal time,ut1)是以地球自转定义的时间尺度,是构成标准时间,即协调世界时(universal time coordinated,utc)的重要组成部分。在utc的产生与保持过程中,通过utc闰秒机制来保证utc与ut1的偏差在±0.9s以内。世界时ut1与极移、章动改正项组成了地球定向参数(earth orientation parameter,eop),ut1还是实现天球与地球坐标变换的核心参数,是深空探测、卫星导航、航天器测控等领域中不可或缺的重要参量。3.当前世界时ut1测量主要使用vlbi技术,vlbi技术无需考虑动力学因素效应,是唯一能够直接测定ut1的空间大地测量技术,也是目前唯一能够解算全部地球定向参数的空间技术。vlbi技术因具有极高的测角精度和长期的稳定性,在解算eop、维持地球、天球参考框架方面发挥着不可替代的作用。根据电磁波的干涉可知,望远镜的角分辨率约等于观测波长除以有效口径。对于vlbi,其空间分辨率约等于观测的波长除以基线长度(即两个vlbi射电望远镜之间的距离)。在观测波长一定的情况下,基线长度是影响ut1精度的主要因素。4.当前国际基线(1万公里)的ut1精度约10微秒,不能满足未来深空探测对ut1的精度需求。为了提高ut1的测量精度,现有技术中采用地面多台站vlbi组网观测进行观测以增加vlbi基线长度,在该方法中面多台站vlbi组网=是由全球分布的多个vlbi台站参加,一般是8-10个站。该方法虽然极大的利用了地球的尺寸,使vlbi的测量精度有所提升,但最长基线也只能接近地球直径,无法对ut1的测量精度有质的提升;且海外不易建站,需要多个国家共同协商观测,极易受到影响,时效性较差,大约滞后2周。技术实现要素:5.为了解决现有技术中存在的上述问题,本发明提供了一种基于星-地超长基线干涉测量的世界时ut1测定方法。本发明要解决的技术问题通过以下技术方案实现:6.本发明提供的一种基于星-地超长基线vlbi观测世界时ut1测定方法,应用于星-地vlbi系统,星-地vlbi系统包括地面vlbi观测站以及卫星vlbi观测站,地面vlbi观测站与卫星vlbi观测站组成星地超长基线,卫星vlbi观测站以及地面vlbi观测站上设置有vlbi射电望远镜,基于星-地超长基线vlbi观测世界时ut1测定方法包括:7.卫星vlbi观测站以及地面vlbi观测站,用于基于相同的观测纲要,在同一观测时刻观测多组已知精确位置的目标射电源,并接收同一观测时刻同一目标射电源发送的同一目标射电源信号;8.卫星vlbi观测站,用于将接收的同一目标射电源信号的第一接收时刻采用rdf数据格式进行数据采集,并以特定频率实时发送至地面观测站;9.地面vlbi观测站,用于将接收的rdf数据格式进行解析以及记录,得到第一接收时刻,并根据自身接收同一目标射电源信号的第二接收时刻,计算同一目标射电源信号到达卫星vlbi观测站以及地面vlbi观测站的几何时延;10.地面vlbi观测站,用于对几何时延进行误差修正,得到实际时延,并建立实际时延与ut1的依赖关系表达式;11.地面vlbi观测站,用于对依赖关系表达式进行求解,得到地球自转角,并根据地球自转角测定世界时ut1。12.可选的,卫星vlbi观测站包括:高轨卫星、高精度测定轨设备、高精度可展开vlbi射电望远镜、信号接收处理系统、高稳定频率基准系统、高速rdf数据记录系统以及高码率传输系统;高精度可展开vlbi射电望远镜,用于观测目标射电源;高精度测定轨设备,用于对高轨卫星进行精密定轨;高稳定频率基准系统采用星载氢钟,用于在高轨卫星上产生卫星所使用的基准信号;高速rdf数据记录系统,用于在高轨卫星上采用rdf数据格式进行记录数据;高码率传输系统,用于采用rdf数据格式进行记录的数据的进行以特定频率实时发送至地面vlbi观测站。13.其中,几何时延表示为:[0014][0015]其中,τg为地面站到卫星观测站的时间延迟,t1和t2分别为同一目标射电源信号到达卫星vlbi观测站和地面vlbi观测站的时间,下标1表示最先接收到目标射电源信号的vlbi观测站,基线向量是地面vlbi观测站g到卫星vlbi观测站s的距离,方向为地面观测站g到卫星观测站s,卫星空间坐标矢量s又是卫星轨道参数ei(i=1,2,3,4,5,6)和重力场与非重力场pk(k=1,2,..,m,..,n)等参数的函数,这样的几何关系就变成了动力学关系,为目标射电源单位方向向量,可由目标射电源在天球参考架下的赤经赤纬得到。[0016]其中,地面vlbi观测站,进一步用于将观测时刻的地面vlbi观测站的坐标从国际地球参考系转换到国际天球参考系;[0017]其中,转化坐标的转化矩阵表示为:[0018][icrs]=q(t)·r(t)·w(t)·[itrs][0019]其中,q(t)、r(t)、w(t)分别由天极在icrs中运动的岁差章动旋转矩阵、地球绕极轴旋转的地球自转角旋转矩阵、极点在itrs中运动形成的极移转换矩阵;[0020]国际天球参考系下的几何时延;[0021]其中,国际天球参考系下的几何时延表示为:[0022][0023]其中,地面vlbi观测站,进一步用于消除国际天球参考系下的几何时延中因行星引力、电离层、对流层、地面vlbi观测站与卫星vlbi观测站之间的钟差、仪器设备、地球潮汐以及广义及狭义相对论效应影响造成的误差,得到国际天球参考系下的实际时延。[0024]其中,国际天球参考系下的实际时延表示为:[0025]τobs=τg+τion+τtro+τclk+τinstr+τdef+ε[0026]其中,τion为电离层延迟;τtro为对流层延迟;τclk为两vlbi观测站的钟差;τinstr为设备时延;τdef为天线形变时延;ε为其他时延。[0027]其中,依赖关系表达式表示为:[0028][0029]其中,[0030][0031]era表示地球自转角。[0032]其中,地面vlbi观测站,进一步用于根据地球自转角与ut1之间的线性关系,得到测定的世界时ut1;[0033]线性关系表示为:[0034]era=2π(0.7790572732640+1.00273781191135448tu)[0035]其中,tu为j2000.0起算的ut1的儒略日计数,tu=julian ut1 date-2451545.0。[0036]可选的,地面vlbi观测站,在进行观测目标射电源之前,用于:[0037]确定卫星观测站的卫星轨道;[0038]根据卫星轨道确定卫星vlbi观测站和地面vlbi观测站的观测频段;[0039]在观测频段内观测多个射电源;[0040]根据观测到的射电源的分布、源流量、方位以及俯仰角选择卫星地面vlbi观测站以及地面vlbi观测站能够在相同时段接收到射电源信号的目标射电源;[0041]根据选择的目标射电源的观测时间、观测频率以及观测带宽,生成ut1的观测纲要。[0042]第二方面,本发明提供的一种基于星-地超长基线vlbi观测世界时ut1测定系统,包括地面vlbi观测站以及卫星vlbi观测站,地面vlbi观测站与卫星vlbi观测站组成星地超长基线,卫星vlbi观测站以及地面vlbi观测站上设置有vlbi射电望远镜;[0043]卫星vlbi观测站以及地面vlbi观测站,用于基于相同的观测纲要,在同一观测时刻观测多组已知精确位置的目标射电源,并接收同一观测时刻同一目标射电源发送的同一目标射电源信号;[0044]卫星vlbi观测站,用于将接收的同一目标射电源信号的第一接收时刻采用rdf数据格式进行采集,并以特定频率实时发送至地面观测站;[0045]地面vlbi观测站,用于将接收的rdf数据格式的数据进行解析以及记录,得到第一接收时刻,并根据自身接收同一目标射电源信号的第二接收时刻,计算同一目标射电源信号到达卫星vlbi观测站以及地面vlbi观测站的几何时延;[0046]地面vlbi观测站,用于对几何时延进行误差修正,得到实际时延,并建立实际时延与ut1的依赖关系表达式;[0047]地面vlbi观测站,用于对依赖关系表达式进行求解,得到地球自转角,并根据地球自转角测定世界时ut1。[0048]本发明提供了一种基于星-地超长基线vlbi观测世界时ut1测定方法及系统,通过地面vlbi观测站与卫星vlbi观测站组成星地超长基线,计算目标射电源信号到地面vlbi观测站与卫星vlbi观测站的观测时延;最后将误差修正过的观测时延进行处理,解算ut1。本发明可以突破国土限制,摆脱地球尺寸对地面vlbi基线长度限制,提高vlbi角分辨率,从而提高ut1的解算精度;同时由于卫星的高度较高,使其受到的对流层及电离层影响较小,可以在更高的频率观测。[0049]以下将结合附图及实施例对本发明做进一步详细说明。附图说明[0050]图1是本发明实施例提供的星-地vlb系统示意图;[0051]图2是本发明实施例提供的一种基于星-地超长基线vlbi观测世界时ut1测定方法的流程示意图;[0052]图3是本发明实施例提供的星-地ut1观测解算仿真流程图。具体实施方式[0053]下面结合具体实施例对本发明做进一步详细的描述,但本发明的实施方式不限于此。[0054]如图1所示,本发明提供的一种基于星-地超长基线vlbi观测世界时ut1测定方法应用于星-地vlbi系统,星-地vlbi系统包括地面vlbi观测站以及卫星vlbi观测站,地面vlbi观测站与卫星vlbi观测站组成星地超长基线,卫星vlbi观测站以及地面vlbi观测站上设置有vlbi射电望远镜。[0055]其中,卫星vlbi观测站包括:高轨卫星、高精度测定轨设备、高精度可展开vlbi射电望远镜、信号接收处理系统、高稳定频率基准系统、高速rdf数据记录系统以及高码率传输系统;高精度可展开vlbi射电望远镜,用于观测目标射电源;高精度测定轨设备,用于对高轨卫星进行精密定轨;高稳定频率基准系统采用星载氢钟,用于在高轨卫星上产生卫星所使用的基准信号;高速rdf数据记录系统,用于在高轨卫星上采用rdf数据格式进行记录数据;高码率传输系统,用于采用rdf数据格式进行记录的数据的进行以特定频率实时发送至地面vlbi观测站。[0056]rdf数据格式是一种由地面vlbi观测站记录并输出的一种基于磁盘存储的数据格式。rdf格式由于只有一个文件头的额外数据记录,其余的记录都是原始甚长基线干涉测量数据,相较而言rdf具有更高的记录效率和较好的可靠性。其中高精度测定轨设备提供精密轨道,优于1cm的定轨精度,使卫星可作为移动测站,另外通过提高频段来减小卫星天线口径,使得星上搭载可行。[0057]星-地基线vlbi观测时,最主要的是卫星精密轨道的确定,观测时刻卫星位置的任何误差将直接影响时间延迟及延迟率等vlbi观测量,导致由观测量解算的ut1精度恶化,因此卫星位置的确定必须达到很高精度。卫星轨道的误差源主要为太阳光压以及相对论效应。目前vlbi的观测精度已达到1-3cm,slr测距精度已达到2-5cm,联合vlbi及slr以及高精度测定轨技术等多技术融合定轨,有望使定轨精度优于1cm。[0058]本发明的卫星搭载vlbi望远镜,与地面vlbi望远镜组成星-地vlbi,提高基线长度,从而提高ut1解算精度,保障深空等领域的进一步发展。[0059]值得说明的是:利用甚长基线干涉测量时,其角分辨率θ由工作波长λ和两面垂直于目标射电源方向的投影距离d决定,公式如下:[0060][0061]从上式可以明显看出,当波长一定时,角分辨率与两天线距离(基线长度)呈反比,即提高基线长度,可以提高角分辨率。由于卫星vlbi与地面vlbi之间的基线距离可以做到比地基vlbi基线距离更长,故星-地vlbi可通过增大基线长度,提高角分辨率,从而达到更高的ut1观测解算精度。[0062]参考图2,本发明提供的一种基于星-地超长基线vlbi观测世界时ut1测定方法包括:[0063]s1,卫星vlbi观测站以及地面vlbi观测站,用于基于相同的观测纲要,在同一观测时刻观测多组已知精确位置的目标射电源,并接收同一观测时刻同一目标射电源发送的同一目标射电源信号;[0064]本发明在观测之间,地面vlbi观测站,在进行观测目标射电源之前,用于:[0065]确定卫星观测站的卫星轨道;[0066]根据卫星轨道确定卫星vlbi观测站和地面vlbi观测站的观测频段;[0067]在观测频段内观测多个射电源;[0068]根据观测到的射电源的分布、源流量、方位以及俯仰角选择卫星地面vlbi观测站以及地面vlbi观测站能够在相同时段接收到射电源信号的目标射电源;[0069]根据选择的目标射电源的观测时间、观测频率以及观测带宽,生成ut1的观测纲要。[0070]值得说明的是:在实际时一般是观测50个射电源左右;不同的射电源观测的次数时长不同;根据射电源的流量、方位以及俯仰、分布来判断出不同的射电源,在实际过程中一次观测时长为2到3个小时,一共观测50到60个目标射电源左右。地面vlbi观测站会将观测纲要上传至卫星vlbi观测站。[0071]s2,卫星vlbi观测站,用于将接收的同一目标射电源信号的第一接收时刻采用rdf数据格式进行数据采集,并以特定频率实时发送至地面观测站;[0072]s3,地面vlbi观测站,用于将接收的rdf数据格式的数据进行解析以及记录,得到第一接收时刻,并根据自身接收同一目标射电源信号的第二接收时刻,计算同一目标射电源信号到达卫星vlbi观测站以及地面vlbi观测站的几何时延;[0073]星-地vlbi观测时,需要地面vlbi观测站和卫星vlbi观测站共同观测同一目标射电源。同一目标射电源的信号到达两vlbi观测站时间不同。由于目标射电源离两vlbi观测站太远,故信号从目标射电源到两vlbi观测站的传播路径可视为平行线,根据几何关系,同一信号到达两观测站的几何时延可以表示为:[0074][0075]其中,τg为地面站到卫星观测站的时间延迟,t1和t2分别为同一目标射电源信号到达卫星vlbi观测站和地面vlbi观测站的时间,下标1表示最先接收到目标射电源信号的vlbi观测站,基线向量是地面vlbi观测站g到卫星vlbi观测站s的距离,方向为地面观测站g到卫星观测站s,卫星空间坐标矢量s又是卫星轨道参数ei(i=1,2,3,4,5,6)和重力场与非重力场pk(k=1,2,..,m,..,n)等参数的函数,这样的几何关系就变成了动力学关系,为目标射电源单位方向向量,可由目标射电源在天球参考架下的赤经赤纬得到。[0076]由于计算两观测站之间时延差,需对观测时刻的观测站坐标进行转换,本发明的地面vlbi观测站,进一步用于将观测时刻的地面vlbi观测站的坐标从国际地球参考系转换到国际天球参考系;[0077]其中,转化坐标的转化矩阵表示为:[0078][icrs]=q(t)·r(t)·w(t)·[itrs][0079]其中,q(t)、r(t)、w(t)分别由天极在icrs中运动的岁差章动旋转矩阵、地球绕极轴旋转的地球自转角旋转矩阵、极点在itrs中运动形成的极移转换矩阵。[0080]同样的,几何时延也需要转化,本发明的地面vlbi观测站,进一步用于将位于国际地球参考系下的几何时延转化为国际天球参考系下的几何时延;[0081]其中,国际天球参考系下的几何时延表示为:[0082][0083]s4,地面vlbi观测站,用于对几何时延进行误差修正,得到实际时延,并建立实际时延与ut1的依赖关系表达式;[0084]值得说明的是:由于信号从目标射电源到观测站的过程中会受到行星引力、电离层、对流层等影响,以及两观测站之间的钟差、仪器设备的影响,地球潮汐、广义及狭义相对论效应等影响。因此本发明需要对几何延迟进行误差修正。[0085]地面vlbi观测站,进一步用于消除国际天球参考系下的几何时延中因行星引力、电离层、对流层、地面vlbi观测站与卫星vlbi观测站之间的钟差、仪器设备、地球潮汐以及广义及狭义相对论效应影响造成的误差,得到国际天球参考系下的实际时延。[0086]国际天球参考系下的实际时延表示为:[0087]τobs=τg+τion+τtro+τclk+τinstr+τdef+ε[0088]其中τg为几何时延,主要与vlbi观测站的相对位置、目标射电源的位置及地球的方向有关。τion为电离层延迟,主要是电磁波在介质中传播的速度与真空中不同,且信号在介质中传播时会因为弯曲效应增加传播距离,可通过双频观测减轻电离层干扰。τtro为对流层延迟,主要与传播路径的温度、压力和湿度有关,并随观测地点的方向和时间变化。由于卫星高度原因,卫星vlbi受到的大气影响要比地面vlbi小一些。τclk为两vlbi观测站的钟差,主要与观测站间不同的氢钟振荡速率有关。τdef为天线形变时延,主要与温度、风荷载及重力等造成的结构形变有关。τinstr为设备时延,主要是信号从馈源接收到数据记录之间的设备所引入的时延,一般情况下,需要进行相应的信号标定。ε为其他时延,主要是由于相对论效应等引入的时延。在星-地超长基线vlbi观测时,相对论效应对系统的固有影响在本质上比对地基vlbi的影响要复杂,原因在于卫星vlbi观测天线相对于地面vlbi天线在高速运动。在星-地vlbi观测时,卫星-地面之间基线两个端点的相对运动是地球自转和卫星运动的结果。由于两观测天线之间的相对速度而引起对卫星vlbi与地面vlbi之间时间延迟观测量的相对论影响,称作下垂弯曲改正,它依赖于卫星相对于地面的速度,所以需要进行额外的相对论效应修正。[0089]若源矢量k→、基线矢量b→、极移、岁差章动等均为已知量,则vlbi几何时延与ut1的依赖关系为:[0090][0091]其中,[0092][0093]era表示地球自转角。[0094]s5,地面vlbi观测站,用于对依赖关系表达式进行求解,得到地球自转角,并根据地球自转角测定世界时ut1。[0095]本步骤中地面vlbi观测站,进一步用于根据地球自转角与ut1之间的线性关系,得到测定的世界时ut1;[0096]线性关系表示为:[0097]era=2π(0.7790572732640+1.00273781191135448tu)[0098]其中,tu为j2000.0起算的ut1的儒略日计数,tu=julian ut1 date-2451545.0。[0099]值得说明的是,本发明通过测定多组已知精确位置目标射电源,得到测量时延,然后通过建立时延模型,误差方程,再通过平差算法即可精确测定地球自转角era。era和世界时则是简单的线性关系,进行最小二乘拟合,即可得到世界时ut1。[0100]本发明提供一种基于星-地超长基线vlbi观测世界时ut1测定方法及系统,通过地面vlbi观测站与卫星vlbi观测站组成星地超长基线,计算目标射电源信号到地面vlbi观测站与卫星vlbi观测站的观测时延;最后将误差修正过的观测时延进行处理,解算ut1。本发明可以突破国土限制,摆脱地球尺寸对地面vlbi基线长度限制,提高vlbi角分辨率,从而提高ut1的解算精度;同时由于卫星的高度较高,使其受到的对流层及电离层影响较小,可以在更高的频率观测。[0101]本发明提供的一种基于星-地超长基线vlbi观测世界时ut1测定系统,包括地面vlbi观测站以及卫星vlbi观测站,地面vlbi观测站与卫星vlbi观测站组成星地超长基线,卫星vlbi观测站以及地面vlbi观测站上设置有vlbi射电望远镜;[0102]卫星vlbi观测站以及地面vlbi观测站,用于基于相同的观测纲要,在同一观测时刻观测多组已知精确位置的目标射电源,并接收同一观测时刻同一目标射电源发送的同一目标射电源信号;[0103]卫星vlbi观测站,用于将接收的同一目标射电源信号的第一接收时刻采用rdf数据格式进行采集,并以特定频率实时发送至地面;[0104]地面vlbi观测站,用于将接收的rdf数据格式的数据进行解析以及记录,得到第一接收时刻,并根据自身接收同一目标射电源信号的第二接收时刻,计算同一目标射电源信号到达卫星vlbi观测站以及地面vlbi观测站的几何时延;[0105]地面vlbi观测站,用于对几何时延进行误差修正,得到实际时延,并建立实际时延与ut1的依赖关系表达式;[0106]地面vlbi观测站,用于对依赖关系表达式进行求解,得到地球自转角,并根据地球自转角测定世界时ut1。[0107]参考图3,结合软件仿真对本发明过程进行说明。[0108]1、.由于该方法现处于预研阶段,不能利用搭载vlbi望远镜的卫星进行实际的ut1测量解算实验,因此前期采用部分仿真数据进行计算,选取一颗搭测定轨设备的卫星,通过地面测轨网获取该卫星的精密轨道,得到其精密的坐标,利用仿真软件模拟该卫星vlbi望远镜与地面vlbi望远镜观测同一目标射电源的观测时延;[0109]2、对该模拟观测时延进行相关处理,得到各通道的频谱值,再经过后处理从相位信息中提取时延值,对该时延进行钟差校准、设备校准、对流层、电离层时延校准,相对论效应等修正,并进行带宽综合处理,提取出经过校准的目标射电源观测群时延;[0110]3、再结合温度、湿度、气压数据,生成分析软件所需的ngs数据格式文件;[0111]4、将生成的ngs文件通过vievs软件利用最小二乘算法进行解算,得到ut1。[0112]以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
本文地址:https://www.jishuxx.com/zhuanli/20240730/150065.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表