基于原子钟的编队卫星时频一致性控制方法和系统与流程
- 国知局
- 2024-07-30 10:31:45
本发明涉及宇航飞行器,具体地,涉及一种基于原子钟的编队卫星时频一致性控制方法和系统。
背景技术:
1、双星编队sar卫星干涉成像要求成像数据具备高相干性,为实现数据高相干性,要求卫星间的时间和频率保持同步,即时间、频率高度一致,双星协调工作。
2、为了满足双星编队的时间、频率一致性要求,针对双星编队卫星,开展了时频一致性控制系统和控制方法研究和设计。
3、专利文献cn104298860a公开了一种geo卫星转发信号码和载波相位偏差的计算方法,首先建立载波大环路码伪距和载波相位伪距方程,然后采用双频码和载波相位的观测结果解算电离层参数,分别计算c1、c2载波上的码和载波相位的偏移量,最终经过滤波获得c1、c2载波上的码和载波相位的实时控制量。
4、国内外可供参考的时频设计方案较多,但现有时频一致性控制方案仅适用于地面通信终端而不适用于在轨卫星,或只能实现将单颗卫星的时频与导航系统时频一致性控制,或只能由地面人工对多颗卫星进行时频一致性控制,上述方案均不满足当前编队卫星自主时频一致性控制需求。为解决上述问题,要求设计出的时频一致性控制方法具备在轨编队卫星自主时频测量和同步功能。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种基于原子钟的编队卫星时频一致性控制方法和系统。
2、根据本发明提供的基于原子钟的编队卫星时频一致性控制方法,包括:
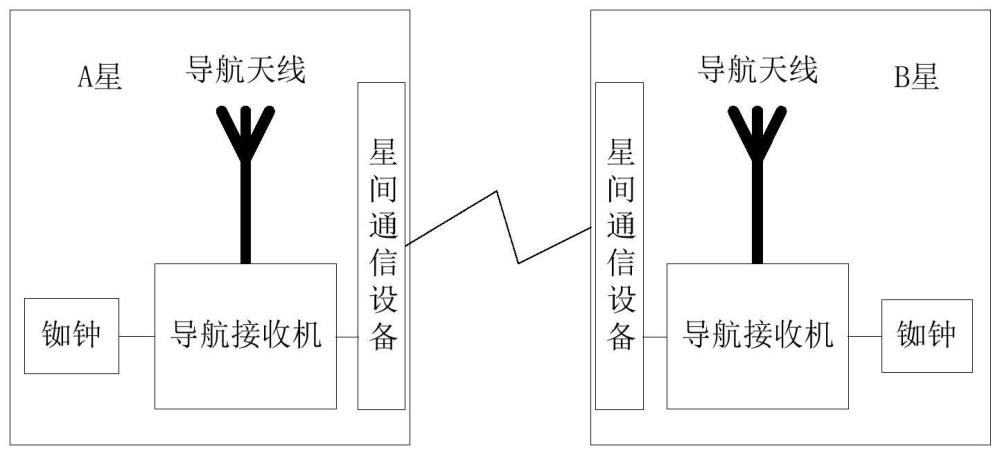
3、分别在两颗卫星上布置一套原子钟、导航接收机、导航天线和星间通信设备;
4、原子钟用于提供钟源,导航接收机通过导航天线接收导航信号并进行捕获解算,将解调出的包括伪距、载波相位在内的原始测量信息通过星间通信设备进行双星信息交互,将接收到的它星原始测量信息与本星原始测量信息时间对齐后进行差分处理,获取相对测量信息;
5、测量编队卫星时差,进行编队卫星时间一致性控制;
6、测量编队卫星频差,进行编队卫星频率一致性控制。
7、优选地,原子钟选用铷钟。
8、优选地,双星时间基准偏差测量通过基于导航共视星观测值解算获取,表达式为:
9、ra=ρa+cδtr,a-cδts+ia+ba+oa+εa
10、rb=ρb+cδtr,b-cδts+ib+bb+ob+εb
11、其中,ra表示a星gnss伪距观测量;ρa表示a星到gnss卫星之间的几何距离;c为光速;δtr,a表示a星接收机钟差改正;δts表示卫星钟差改正;ia表示:a星大气延迟误差;ba表示:a星接收机硬件延迟标定后残余误差;oa表示:a星gnss卫星轨道误差;εa表示:a星接收机噪声和多径效应误差;
12、取以上两观测量之差,则有:
13、δrab=δρab+c·δδtr,ab+δiab+δbab+δoab+δεab
14、其中,δrab表示gnss伪距观测量单差;δρab表示接收机到gnss卫星之间的几何距离单差;δδtr,ab表示接收机钟差的单差,即两台gnss接收机的时差;δiab表示大气延迟误差单差;δbab表示接收机硬件延迟标定后残余误差单差;δoab表示gnss卫星轨道误差的单差;δεab表示接收机噪声和多径效应误差单差;
15、两星时钟的相对钟差为:
16、
17、优选地,双星时间一致性控制采用单向时差补偿对齐控制方法,编队卫星时差测量通过星间链路将各自观测的导航测量数据进行交换。
18、优选地,测量卫星与导航系统的时钟漂移量,通过时钟漂移量折算频率差;
19、根据卫星时钟漂移量遥测计算频率差值后,采用单向频率修正补偿控制方法,通过设置频率控制字对频率微调,最终实现双星频率一致性控制。
20、根据本发明提供的基于原子钟的编队卫星时频一致性控制系统,包括:
21、分别在两颗卫星上布置一套原子钟、导航接收机、导航天线和星间通信设备;
22、原子钟用于提供钟源,导航接收机通过导航天线接收导航信号并进行捕获解算,将解调出的包括伪距、载波相位在内的原始测量信息通过星间通信设备进行双星信息交互,将接收到的它星原始测量信息与本星原始测量信息时间对齐后进行差分处理,获取相对测量信息;
23、测量编队卫星时差,进行编队卫星时间一致性控制;
24、测量编队卫星频差,进行编队卫星频率一致性控制。
25、优选地,原子钟选用铷钟。
26、优选地,双星时间基准偏差测量通过基于导航共视星观测值解算获取,表达式为:
27、ra=ρa+cδtr,a-cδts+ia+ba+oa+εa
28、rb=ρb+cδtr,b-cδts+ib+bb+ob+εb
29、其中,ra表示a星gnss伪距观测量;ρa表示a星到gnss卫星之间的几何距离;c为光速;δtr,a表示a星接收机钟差改正;δts表示卫星钟差改正;ia表示:a星大气延迟误差;ba表示:a星接收机硬件延迟标定后残余误差;oa表示:a星gnss卫星轨道误差;εa表示:a星接收机噪声和多径效应误差;
30、取以上两观测量之差,则有:
31、δrab=δρab+c·δδtr,ab+δiab+δbab+δoab+δεab
32、其中,δrab表示gnss伪距观测量单差;δρab表示接收机到gnss卫星之间的几何距离单差;δδtr,ab表示接收机钟差的单差,即两台gnss接收机的时差;δiab表示大气延迟误差单差;δbab表示接收机硬件延迟标定后残余误差单差;δoab表示gnss卫星轨道误差的单差;δεab表示接收机噪声和多径效应误差单差;
33、两星时钟的相对钟差为:
34、
35、优选地,双星时间一致性控制采用单向时差补偿对齐控制方法,编队卫星时差测量通过星间链路将各自观测的导航测量数据进行交换。
36、优选地,测量卫星与导航系统的时钟漂移量,通过时钟漂移量折算频率差;
37、根据卫星时钟漂移量遥测计算频率差值后,采用单向频率修正补偿控制方法,通过设置频率控制字对频率微调,最终实现双星频率一致性控制。
38、与现有技术相比,本发明具有如下的有益效果:
39、(1)按照在编卫星整个系统中的功能进行划分,对编队双星时频一致性控制系统进行系统设计;
40、(2)通过采用铷钟作为时频原子钟,解决了传统晶振稳定度较差的问题,实现了编队卫星同时具备高精度、高稳定度的时频特性;
41、(3)通过基于导航共视星观测值解算方法,解决了双星时差获取问题,实现了在轨编队卫星时间基准偏差实时测量;
42、(4)通过基于实时双星时差测量的单向时差补偿对齐控制方法,解决了双星在轨时间同步难题,实现了编队时间一致性控制;
43、(5)通过测量卫星与导航系统的时钟漂移量,再通过时钟漂移量折算频率差的方法,实现了编队双星频率差值的获取;
44、(6)根据卫星时钟漂移量遥测计算频率差值后,采用单向频率修正补偿控制方法,通过设置频率控制字对频率微调,最终实现双星频率一致性控制;
45、(7)通过星间通信链路将每颗卫星各自观测到的导航测量数据进行实时交换并基于实时观测数据进行实时时差测量。
本文地址:https://www.jishuxx.com/zhuanli/20240730/153237.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种可拆卸手表的制作方法
下一篇
返回列表