基于光纤陀螺误差校正的世界时解算方法及系统
- 国知局
- 2024-07-30 10:30:55
本发明属于世界时测量,涉及一种基于光纤陀螺误差校正的世界时解算方法及系统。
背景技术:
1、世界时(ut1)参数是以地球自转运动为参考的时间计量系统,其反映了地球在空间的自转角,在航空航天、深空探测等精密空间应用领域中均表现出无可比拟的重要性,测量世界时ut1技术的研究发展与应用受到越来越多的关注。但是目前ut1测量由国际地球自转与参考系服务(iers)主要利用甚长基线干涉测量(vlbi)进行测量并定期发布,然而发布的结果只提供周报和月报两种形式,其分别滞后一周及一个月,时间分辨率仅为1天,特别在战时会辐射信息导致隐蔽性差,且受到iers组织的封锁,不能正常获取。
2、由于大框架光学陀螺被认为是唯一能够提供快速和高灵敏度的地球旋转轴变化的设备。为了提高准确性、实时性及隐蔽性,可采用光纤陀螺与vlbi相结合的方式解算高分辨率世界时ut1。由于固连在地球表面的光纤陀螺不仅会受到地球自转的影响,也会受到诸多噪声影响,导致世界时解算存在误差。
技术实现思路
1、本发明的目的在于解决现有技术中ut1测量具有滞后性强和分辨率低的特点,同时通过光纤陀螺测量不仅会受到地球自转的影响,也会受到诸多噪声影响,导致世界时解算存在误差的问题,提供一种基于光纤陀螺误差校正的世界时解算方法及系统。
2、为达到上述目的,本发明采用以下技术方案予以实现:
3、基于光纤陀螺误差校正的世界时解算方法,包括:
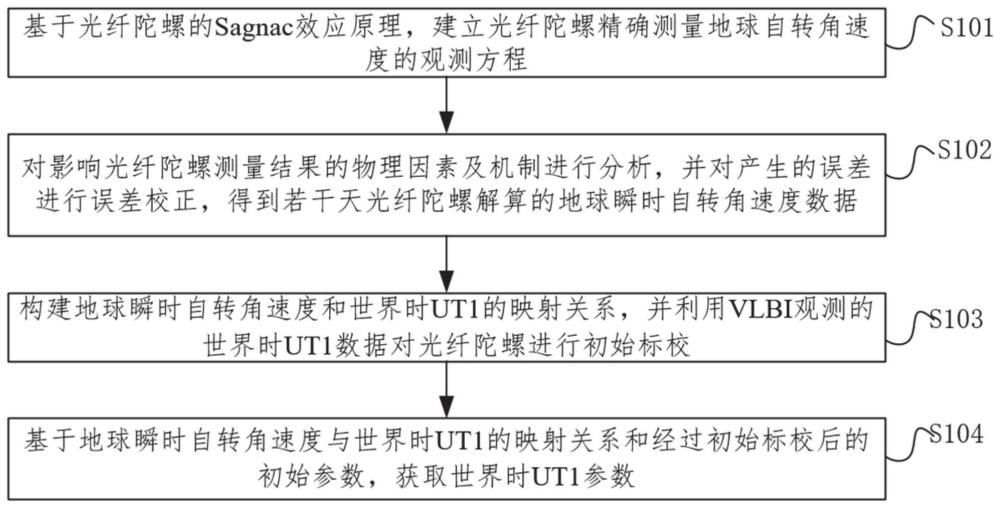
4、基于光纤陀螺的sagnac效应原理,建立光纤陀螺精确测量地球自转角速度的观测方程;
5、对影响光纤陀螺测量结果的物理因素及机制进行分析,并对产生的误差进行误差校正,得到若干天光纤陀螺解算的地球瞬时自转角速度数据;
6、构建地球瞬时自转角速度和世界时ut1的映射关系,并利用vlbi观测的世界时ut1数据对光纤陀螺进行初始标校;
7、基于地球瞬时自转角速度与世界时ut1的映射关系和经过初始标校后的初始参数,获取世界时ut1参数。
8、本发明的进一步改进在于:
9、进一步的,基于光纤陀螺的sagnac效应原理,建立光纤陀螺精确测量地球自转角速度的观测方程,具体为:
10、光纤陀螺基于sagnac效应,在环形光路中相反传播的光束产生的相位差与所敏感的角速度存在的关系表示为:
11、
12、其中,r为光纤环的半径,l为单圈光纤的周长,n为光纤环的匝数,λ为光源的波长;
13、考虑到测量过程中受到各项误差项及噪声的影响,将公式(1)展开得到光纤陀螺在地固坐标系下的sagnac效应观测方程,如公式(2)所示:
14、
15、其中,k=4πlr/λc,ω0为地球平均自转角速度,m1,m2反映瞬时地球自转角速度的极移变化,m3反映了地球瞬时自转角速度的变化,dtns代表陀螺法线方向在南北方向的倾斜量,表示测站的纬度变化,δφpn和δφinstr分别表示岁差章动和光纤陀螺仪器的固有噪声产生的等效相位差变化量。
16、进一步的,对影响光纤陀螺测量结果的物理因素及机制进行分析,具体为:对光纤陀螺测量结果的物理因素及机制进行分析,存在定向误差与地球误差;其中,定向误差为日月引潮力引起的固体潮海洋潮、局部地表形变导致光纤陀螺测量产生的倾斜误差;地球误差为极移、岁差和章动对光纤陀螺造成的测量误差。
17、进一步的,日月引潮力引起的固体潮海洋潮、局部地表形变导致光纤陀螺测量产生的倾斜误差,具体为:
18、地球固体潮产生的潮汐倾斜在南北方向的倾斜总量如公式(3)所示:
19、
20、光纤陀螺测量平台在固体潮汐作用下产生南北倾斜变化如公式(4)所示:
21、
22、参考点引力位变化而引起的铅垂线变化,如公式(5)所示:
23、
24、分析海洋负荷潮引起的倾斜,得到潮汐倾斜在南北方向的倾斜总量表示为:
25、
26、公式(6)分为倾斜变化加铅垂线变化;其中,光纤陀螺测量平台在海洋潮汐作用下产生南北倾斜变化:
27、
28、参考点引力位变化而引起的铅垂线变化:
29、
30、基于水平仪对局部地表形变导致光纤陀螺测量产生的倾斜误差进行补偿;水平仪测量的数据中不仅包含因地表几何形变的倾斜,还包含了铅垂线偏移数据:
31、ξtilt=ξdef+ξvd (9)
32、采用水平仪改正倾斜与潮汐模型修正铅垂线相结合的方法,共同补偿对光纤陀螺造成的影响。
33、进一步的,极移对光纤陀螺造成的测量误差,具体为:
34、极移通过iers2010的模型进行计算:
35、m=[asin(argi(t))+bcos(argi(t))]+i[csin(argi(t))+dcos(argi(t))] (10)
36、其中,系数a、b、c、d的取值在iers2010决议查询;地球瞬时自转轴的极移m通过利用复数形式进行表示:m=m1+im2,argi(t)参数分别由6个基本天文参数(l、l′、f、d、ω、γ)线性组合而成;
37、iers2010模型组成极移高频变化中的周日和半周日变化,通过公式(10)可分别计算出在天球参考轴相对地球参考系的周日和半周日极移变化;通过公式(2)的观测方程,将m1,m2转换为等价的角速度变化数据。
38、进一步的,岁差对光纤陀螺造成的测量误差,具体为:
39、岁差采用p03岁差模型,其中:
40、
41、
42、
43、
44、其中,ψ表示日月黄经岁差,即平春分点总位移在历元黄道上的移动量,ω表示瞬时平赤道面与参考历元黄道的交角,ε表示黄赤交角,即瞬时黄道对瞬时平赤道的交角,χ表示黄道岁差在春分点在瞬时平赤道上的移动量;
45、p表示黄经总岁差,通过岁差旋转矩阵计算:
46、p=r1(-ε)r3(ψ)r1(ω)r3(-χ) (15)
47、进一步的,章动对光纤陀螺造成的测量误差,具体为:
48、章动采用iau2000a章动模型,其中由678个日月章动项和678个行星章动项组成,求解公式以黄经、交角章动的形式进行计算;得到黄经章动δψ和交角章动δε值后,设n为黄经总章动,可通过章动矩阵实现从瞬时平赤道到瞬时真赤道转换,转换矩阵如下:
49、n(t)=rx(-εa-δε)rz(-δψ)rx(εa) (16)
50、ε=23°26′21.406"-46.8150"t-0.00059"t2+0.001813"t3 (17)
51、由此,得到真赤道坐标系下的章动值,并求出一天地球瞬时自转轴在绕北黄极运动的实时位置。
52、进一步的,构建地球瞬时自转角速度和世界时ut1的映射关系,并利用vlbi观测的世界时ut1数据对光纤陀螺进行初始标校,具体为:
53、对公式(2)进行化简,得到:
54、
55、其中ωbias、dtnsbias为陀螺与水平仪测量值的零偏、ans、afog为陀螺与水平仪一阶随时间变化量、εm1m2为极移对角速度的影响、为法线方向偏移对角速度的影响;
56、lod日长变化与地球自转角速度的关系为:
57、
58、因此ut1-utc与地球自转角速度的关系为:
59、
60、
61、
62、通过获取iers公报bulletin a中对应测量周期内前两天的ut1-utc值对上式进行初始标校,以获取参数kp1、kp2的值,完成对光纤陀螺的初始标校。
63、进一步的,基于地球瞬时自转角速度与世界时ut1的映射关系和经过初始标校后的初始参数,获取ut1参数,具体为:将标校后的初始参数kp1、kp2带入公式(22),则在不依赖后期vlbi观测的世界时ut1情况下,利用光纤陀螺、水平仪测量的信息获取世界时ut1。
64、基于光纤陀螺误差校正的世界时解算系统,包括:
65、构建模块,所述构建模块基于光纤陀螺的sagnac效应原理,建立光纤陀螺精确测量地球自转角速度的观测方程;
66、误差校正模块,所述误差校正模块对影响光纤陀螺测量结果的物理因素及机制进行分析,并对产生的误差进行误差校正,得到若干天光纤陀螺解算的地球瞬时自转角速度数据;
67、标校模块,所述标校模块构建地球瞬时自转角速度和世界时ut1的映射关系,并利用vlbi观测的世界时ut1数据对光纤陀螺进行初始标校;
68、获取模块,所述获取模块基于地球瞬时自转角速度与世界时ut1的映射关系和经过初始标校后的初始参数,获取世界时ut1参数
69、与现有技术相比,本发明具有以下有益效果:
70、本发明通过光纤陀螺进行地球瞬时自转角速度的测量,并对光纤陀螺测量过程中存在的相应误差进行标校以提高准确性,再根据地球瞬时自转角速度与世界时之间的函数关系解算世界时ut1。本发明利用vlbi测量进行初始标校后,在后期不依赖vlbi方法测量前提下,仅使用光纤陀螺敏感的角速度信息解算世界时ut1。本发明能够有效的克服现有的ut1测量滞后性强和分辨率低的问题,提高计算世界时ut1的准确性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/153164.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表