导航星座天基守时方法
- 国知局
- 2024-07-30 10:33:53
本发明涉及卫星,具体涉及一种导航星座天基守时方法。
背景技术:
1、向全球用户及近地空间飞行器进行高精度的时间传递或授时是gnss卫星导航系统的核心任务之一。导航系统实时广播的星历时钟信息由地面系统生成更新上传。如果基于天基观测和星载原子钟建立高稳定的gnss时间基准,可以大幅降低地面运行维护复杂度。目前国际上各卫星导航系统正在关注推动基于星间测量交互支持的星座天基长期守时功能建设。
2、星座长期高可靠天基守时实现,除依赖高稳定的星载原子钟、星钟过程噪声准确性设置、高精度的星间测量、星钟状态初值和天基时间基准构建等因素外,还受误差模型修正完善程度的影响。传统星间双向测量历元归化后,解耦后的钟差相对观测中的测量误差,主要包括相对论效应和星间链路收发时延差。星间链路时延一般稳定性较高,可以提前标定使用。对于星间链路两端卫星瞬时所在位置的重力位和运行速度等不同引起的相对论效应,常规的星座天基守时算法遵从igs协议,只考虑广义相对论和狭义相对论的常量漂移部分、轨道偏心率引起的周期性波动部分的修正。
3、目前现有技术中仍亟待解决的问题主要是,常规的星座天基守时技术对相对论效应的修正,仅顾及广义相对论和狭义相对论的常量漂移部分、由轨道偏心率引起的周期性波动部分的修正,未顾及由地球j2摄动引起的半轨道周期、太阳和月球效应引起的半月相和半年周期等高阶相对论误差,忽略以上高阶相对效应改正,会显著影响星间钟差测定精度、星钟预测性能和频率稳定度等,进而会降低天基时间基准构建和星座长期守时授时能力。先前研究给出的天基守时方案,未考虑高阶相对论效应影响,抑制卫星高稳定星载原子钟发挥最大性能,降低星座长期天基守时表现。
技术实现思路
1、为解决上述现有技术中存在的问题,本发明提出一种顾及高精度相对论修正的导航星座长期天基守时方法,消除现igs协议相对论模型缺陷引起的星钟半轨道等周期频率误差,改善星座长期守时和授时服务性能。
2、为实现上述本发明的目的,本发明实施例提出一种导航星座天基守时方法,包括:
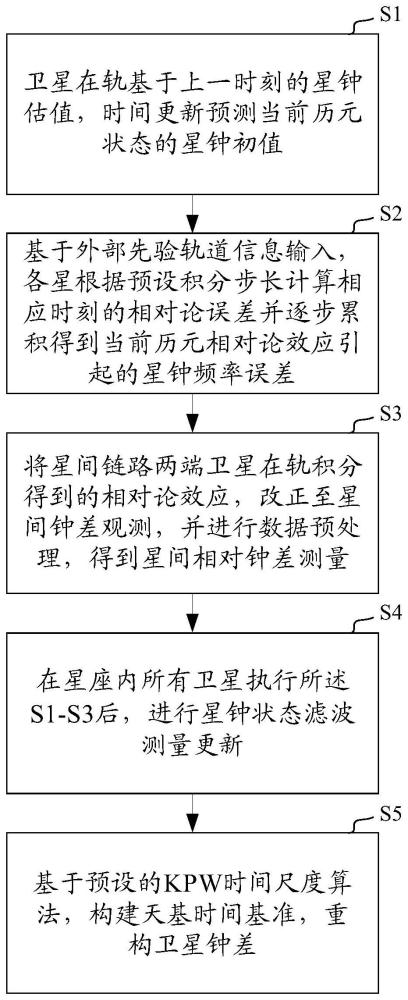
3、s1,卫星在轨基于上一时刻的星钟估值,时间更新预测当前历元状态的星钟初值;
4、s2,基于外部先验轨道信息输入,各星根据预设积分步长计算相应时刻的相对论误差并逐步累积得到当前历元相对论效应引起的星钟频率误差;
5、s3,将星间链路两端卫星在轨积分得到的相对论效应,改正至星间钟差观测,并进行数据预处理,得到星间相对钟差测量;
6、s4,在星座内所有卫星执行所述s1-s3后,进行星钟状态滤波测量更新;
7、s5,基于预设的kpw时间尺度算法,构建天基时间基准,重构卫星钟差。
8、在本发明的优选实施例中,所述s1中,卫星钟差参数的时间更新表示为:
9、xk,k-1=φk,k-1·xk-1+wk-1,wk-1~n(0,qk-1)
10、dk,k-1=φk,k-1·dk-1·φk,k-1+qk-1
11、其中,下标k和k-1分别表示当前历元和上一历元,x为星钟状态矢量,包括时差a0、时漂a1和频漂a2,w为动态噪声向量,q为动态噪声w的协方差阵,dk-1和dk,k-1为上一历元的误差协方差阵和当前历元的预测协方差阵,φk,k-1为表示上一历元到当前历元的状态转移矩阵。
12、在本发明的优选实施例中,所述s2中,所述外部先验轨道信息,包括广播星历轨道或天基空间基准维持卫星位置信息;
13、所述s2中,所述相对论误差,包括地球非球谐引力势和太阳月球总潮汐势引起高阶相对论效应。
14、在本发明的优选实施例中,所述s2中,当前历元由相对论效应引起的星钟频率变化表示为:
15、
16、其中,c表示光速,v为卫星速度,r为地球非球谐引力势,vs和vm分别为太阳月球总潮汐势,g和me分别为地球引力常数和地球质量,h为预设积分步长,tk、tk-1分别表示当前历元和上一历元时刻。
17、在本发明的优选实施例中,所述s3中,对星间链路两端为卫星a和卫星b的星间双向链路解耦的星间钟差观测pab进行修正,星间钟差观测pab表示为:
18、pab=c·[dtb(tk)-dta(tk)]+c(δa′a-δb′)+c(δτa,r-δτb,r)+εab
19、其中,δ′a和δ′a分别为卫星a和卫星b的星间链路载荷设备发射和接收时延之差的一半,εab为测量噪声,δτa,r和δτb,r分别表示卫星a和卫星b积分累计的相对论效应引起的钟差变化,dta(tk)和dtb(tk)分别表示当前历元tk的卫星a和卫星b的星钟钟差,可表示为:
20、dta(tk)=aa,0+aa,1·(tk-tk-1)+aa,2·(tk-tk-1)2
21、dtb(tk)=ab,0+ab,1·(tk-tk-1)+ab,2·(tk-tk-1)2
22、其中,aa,0、aa,1和aa,2分别表示卫星a的时差、时漂和频漂,ab,0、ab,1和ab,2分别表示卫星b的时差、时漂和频漂。
23、经误差修正后,进行星间钟差观测的数据预处理,先计算星间钟差验前残差:
24、
25、其中,和分别为从上一历元时差a0、时漂a1和频漂a2根据式xk,k-1的一步预测值;
26、对残差进行一致性检验,识别剔除星间异常钟差观测,获得干净的星间双向钟差观测,假设卫星a在当前历元tk有n个星间钟差观测:
27、l1×n=[res1 res2 ... resi ... resn]
28、对星间钟差先验残差l1×n向量求中位数mad,当满足下式时,认为观测值状态异常,对其进行剔除或标记:
29、|resi-mad|>λ·m
30、其中,λ和m为经验值,m与星间链路钟差测量噪声大小有关。
31、在本发明的优选实施例中,所述s4中,进行星钟状态滤波测量更新,先构建观测方程:
32、zk=hk·xk,k-1+lk,lk~n(0,rk)
33、其中,zk hk和lk为整星座的星间相对钟差观测量、星钟滤波估计设计矩阵和验前残差阵,rk为观测值方差阵;
34、星钟差滤波估计形式表示为:
35、
36、lk=zk-hkxk,k-1
37、xk=xk,k-1+kkjk
38、其中,k、j为滤波增益阵,xk为当前历元tk时刻星钟滤波估值。
39、在本发明的优选实施例中,所述s5中,利用天基kpw时间尺度算法,舍去星钟相位估值,利用频率估值进行钟差重构作为加权平均时间尺度的钟差预报值,实现星座无地面支持模式下系统时间的长期保持,表示为:
40、
41、其中,xi(t)为原子钟i相对理想时间尺度的钟差,为原子钟相对天基kalman时间尺度的钟差估值,xe(t)为天基kalman时相对理想时间尺度的钟差,wi(t)为反映原子钟i游走噪声强度的加权因子,n为卫星原子钟数目。
42、本发明的导航星座天基守时方法,利用高精度相对论修正模型,充分顾及星间链路两端两颗卫星瞬时所在位置的重力位和运行速度不同,导致的卫星钟频率周期性误差,进而推动各星载原子钟发挥其最大性能,实现更可靠的星座长期天基守时。
本文地址:https://www.jishuxx.com/zhuanli/20240730/153427.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
壳体及钟表的制作方法
下一篇
返回列表