一种多圈编码器电路的制作方法
- 国知局
- 2024-07-30 10:47:13
本技术涉及编码器,尤其涉及一种多圈编码器电路。
背景技术:
1、现有协作机器人负载端编码器采用单圈绝对值编码器,无法记录机器人由于频繁标定零点而产生的关节旋转,使关节内部线缆可能造成多圈拧紧现象,对机器人系统使用寿命及可靠性产生影响。为解决以上问题一般是在关节负载端添加多圈绝对值编码器,多圈记忆功能采用的电池以及霍尔传感器等器件组成的系统,由于电池需要定期维护以及有一定爆炸风险,限制了机器人的使用场景以及减短了维护周期。
2、现有的部分机器人wiegand导线能量收集模块代替以上电池模块,其原理是电机旋转时,由于永磁体的旋转在wiegand导线中产生尖峰电压来给圈数功能电路供电,达到记忆多圈位置的功能,但该系统成本和复杂程度比较高,实现量产具有一定难度。
技术实现思路
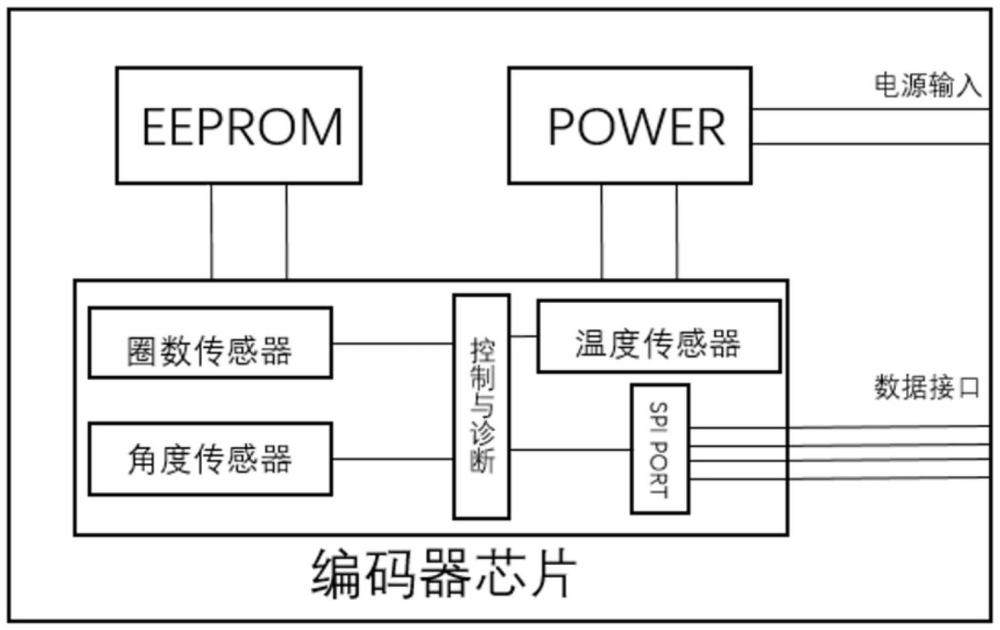
1、为了解决上述问题,本实用新型提供了一种多圈编码器电路,包括:编码器芯片,所述编码器芯片正上方安装有磁环;角度传感器,设于所述编码器芯片上,用于获取当前的单圈位置数据及对应绝对值角度;圈数传感器,设于所述编码器芯片上,用于存储圈数数据;eeprom器件,与所述编码器芯片连接,用于存储所述编码器芯片在标定中的位置补偿数据;位置采集模块,与所述编码器芯片连接,用于读取编码器芯片的绝对值角度、圈数数据,获取得到关节位置信息。
2、与现有技术相比较,本实用新型带来的有益效果是:
3、本实用新型提供一种多圈编码器电路,通过编码器芯片和磁环解决了现有机器人关节负载端由于大多数采用单圈绝对值编码器而无法记录负载输出多圈位置的问题,同时通过对多圈编码器电路结构完善,能够实现对机器人关节位置信息的准确记录和获取,提高了系统的稳定性和可靠性。
技术特征:1.一种多圈编码器电路,其特征在于,包括:编码器芯片,所述编码器芯片正上方安装有磁环;角度传感器,设于所述编码器芯片上,用于获取当前的单圈位置数据及对应绝对值角度;圈数传感器,设于所述编码器芯片上,用于存储圈数数据;eeprom器件,与所述编码器芯片连接,用于存储所述编码器芯片在标定中的位置补偿数据;位置采集模块,与所述编码器芯片连接,用于读取编码器芯片的绝对值角度、圈数数据,获取得到关节位置信息。
2.根据权利要求1所述的多圈编码器电路,其特征在于,所述编码器芯片上还设有温度传感器,用于获取当前器件实时温度并补偿到内部模拟电路。
3.根据权利要求1所述的多圈编码器电路,其特征在于,所述编码器芯片通过spi接口将关节位置信息发送给所述位置采集模块。
4.根据权利要求3所述的多圈编码器电路,其特征在于,所述位置采集模块还为所述编码器芯片提供供电接口,用于给编码器芯片供电。
5.根据权利要求4所述的多圈编码器电路,其特征在于,所述位置采集模块为驱动板,所述驱动板上设有mcu,用于接收所述编码器芯片的关节位置信息。
6.根据权利要求5所述的多圈编码器电路,其特征在于,所述编码器芯片、位置采集模块分别与spi接口的cs、clk、miso以及mosi对应相连。
技术总结本技术公开了一种多圈编码器电路,包括:编码器芯片,所述编码器芯片正上方安装有磁环;角度传感器,设于所述编码器芯片上,用于获取当前的单圈位置数据及对应绝对值角度;圈数传感器,设于所述编码器芯片上,用于存储圈数数据;EEPROM器件,与所述编码器芯片连接,用于存储所述编码器芯片在标定中的位置补偿数据;位置采集模块,与所述编码器芯片连接,用于读取编码器芯片的绝对值角度、圈数数据,获取得到关节位置信息;记录负载输出多圈位置,同时通过对多圈编码器电路结构完善,能够实现对机器人关节位置信息的准确记录和获取,提高了系统的稳定性和可靠性。技术研发人员:毛吉灿,张奎伟,孙恺,曹宇男受保护的技术使用者:苏州艾利特机器人有限公司技术研发日:20231122技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240730/154309.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表