一种应用于叶尖定时测量的主键相识别装置及方法与流程
- 国知局
- 2024-07-30 10:54:24
本技术涉及旋转叶片测量领域,尤其涉及一种应用于叶尖定时测量的主键相识别装置及方法。
背景技术:
1、在众多旋转叶片监测方法中,叶尖定时技术具有非接触性、非破坏性及测试原理简单等优点,被认为是最有发展前景的叶片在线监测方法。叶尖定时技术是通过对旋转叶片每一圈扫过传感器的实际时间与理论时间的差来获得叶片振动信息,这一原理决定了该技术仅适用于恒转速下叶片振动的测量。但在实际生产中,受激振力、负载等因素的影响,叶片很难保持恒定转速运行,这就导致传统的叶尖定时技术在变转速条件下难以对叶片的振动信息进行有效测量。一旦转速发生波动,则叶片振动产生的时间差远小于转速变化引入的时间差,这就使得监测到的叶尖定时信号失去了叶片振动测量的意义。
2、通过分析叶尖定时系统发现,无论转速如何波动及变化,叶片根部与转轴的相对位置永远是固定不变的,如果能够利用叶尖相对于转轴上某一位置的相对变化来描述叶片的振动,则可解决传统叶尖定时系统在变转速下难以测量的问题。基于此,提出采用多参考键相的变转速下叶片振动监测方法,在转轴上均匀或近似均匀地布置多个参考键相,受限于结构特点,参考键相的数量会远小于叶片的数量,因而无法满足每个叶片均有对应的参考键相的需求。但由于转速变化是一个连续渐变的过程(非突变),可以认为相邻两键相间的转速为匀速过程,因此,在相邻参考键相间按照叶片数量插入相应的虚拟参考点,使每一个叶片在叶根处对应一个键相参考点,利用这些参考点即可求得某时刻叶片对应的振动位移。由此可见,键相是叶尖定时准确测量的基础,多键相能够有效的提高转速波动情况下测量的准确率。
3、现有的多键相测量包括磁钢键相方案、高低齿键相方案和反光键相方案,但是存在对工作环境要求高、易产生摩损、阈值比较不稳定、信号识别硬件回路复杂且易受干扰等缺点。因此,亟需提出一种对工作环境要求不高且识别准确的键相识别方案。
技术实现思路
1、本技术提供一种应用于叶尖定时测量的主键相识别装置及方法,以至少解决对工作环境要求高、易产生摩损、阈值比较不稳定、信号识别硬件回路复杂且易受干扰的技术问题。
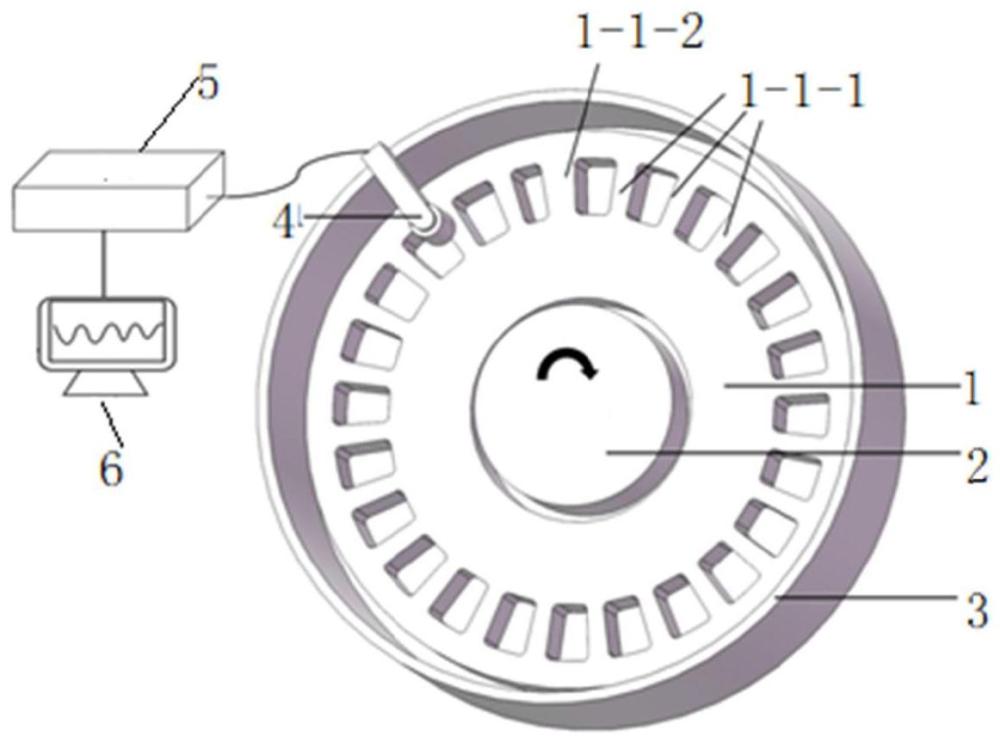
2、本技术第一方面实施例提出一种应用于叶尖定时测量的主键相识别装置,所述装置包括:齿轮、旋转轴、外壳、传感器、时间戳发生装置和控制器;
3、所述齿轮上设置有键相齿,且所述齿轮固定在所述旋转轴上,其中,所述键相齿包括多个刚性键相齿和一个主键相齿;
4、所述外壳套在所述齿轮上;
5、所述传感器固定在所述外壳上,用于采集所述键相齿的脉冲信号;
6、所述时间戳发生装置与所述传感器连接,所述时间戳发生装置用于标记各脉冲信号的生成时间和结束时间;
7、所述控制器与所述时间戳发生装置连接,所述控制器用于计算各键相齿的脉冲宽度,进而识别出主键相齿。
8、优选的,所述多个刚性键相齿和所述主键相齿均匀分布在所述齿轮上且所述刚性键相齿和所述主键相齿的前沿在圆周上均匀分布;
9、所述主键相齿的齿尖宽度是所述刚性键相齿的齿尖宽度的n倍。
10、进一步的,所述传感器包括:光纤传感器或电涡流传感器或电容传感器。
11、进一步的,当所述传感器为电涡流传感器或电容传感器时,所述齿轮为导电材质的齿轮。
12、本技术第二方面实施例提出一种应用于叶尖定时测量的主键相识别方法,所述方法包括:
13、传感器采集各键相齿的脉冲信号,并将所述脉冲信号发送到所述时间戳发生装置;
14、时间戳发生装置对各键相齿的脉冲信号的开始时间和结束时间进行标记,并将标记开始时间和结束时间后的各键相齿的脉冲信号发送到控制器;
15、控制器基于所述标记开始时间和结束时间后的各键相齿的脉冲信号确定各键相齿的脉冲宽度,并脉冲宽度中的最大值对应的键相齿识别为主键相齿。
16、优选的,所述基于所述标记开始时间和结束时间后的各键相齿的脉冲信号确定各键相齿的脉冲宽度包括:
17、基于所述标记开始时间和结束时间后的各键相齿的脉冲信号确定各键相齿的触发时间;
18、根据叶轮在当前旋转周期内的运动状态确定在当前旋转周期各键相齿对应的角速度;
19、根据所述叶轮当前旋转周期对应的角速度和所述各键相齿的触发时间确定各键相齿的脉冲宽度。
20、进一步的,所述根据叶轮在当前旋转周期内的运动状态确定在当前旋转周期各键相齿对应的角速度,包括:
21、当叶轮在当前旋转周期内的运动状态为匀速旋转时,利用公式ωn=2π/tn,确定所述叶轮在当前旋转周期对应的平均角速度,将所述平均角速度作为当前旋转周期各键相齿对应的角速度;
22、当叶轮在当前旋转周期内的运动状态为变速旋转时,利用公式确定当前旋转周期各键相齿触发时的瞬时角速度,将各键相齿触发时的瞬时角速度作为当前旋转周期各键相齿对应的角速度。
23、其中,ωn为第n个旋转周期内的平均角速度,tn为第n个旋转周期时长,ωn,i为第n个旋转周期内第i个键相齿触发时的瞬时角速度,tarri,i+1,n为第n个旋转周期内第i+1个键相齿的开始时间,tarri,i,n为第n个旋转周期内第i个键相齿的开始时间,m为键相齿总数。
24、进一步的,当叶轮在当前旋转周期内的运动状态为匀速旋转时,各键相齿的脉冲宽度的计算式如下:
25、θtrig,i,n=ωnttrig,i,n
26、式中,θtrig,i,n为第n个旋转周期内第i个键相齿的脉冲宽度,ωn为第n个旋转周期内的平均角速度,ttrig,i,n为第n个旋转周期内第i个键相齿的触发时间。
27、当叶轮在当前旋转周期内的运动状态为变速旋转时,各键相齿的脉冲宽度的计算式如下:
28、θtrig,i,n=ωn,ittrig,i,n
29、式中,ωn,i为第n个旋转周期内第i个键相齿触发时的瞬时角速度。
30、本技术第三方面实施例提出一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时,实现如第二方面实施例所述的方法。
31、本技术第四方面实施例提出一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第二方面实施例所述的方法。
32、本技术的实施例提供的技术方案至少带来以下有益效果:
33、本技术提出了一种应用于叶尖定时测量的主键相识别装置及方法,所述装置包括:齿轮、旋转轴、外壳、传感器、时间戳发生装置和控制器;所述齿轮上设置有键相齿,且所述齿轮固定在所述旋转轴上,其中,所述键相齿包括多个刚性键相齿和一个主键相齿;所述外壳套在所述齿轮上;所述传感器固定在所述外壳上,用于采集所述键相齿的脉冲信号;所述时间戳发生装置与所述传感器连接,所述时间戳发生装置用于标记各脉冲信号的生成时间和结束时间;所述控制器与所述时间戳发生装置连接,所述控制器用于计算各键相齿的脉冲宽度,进而识别出主键相齿。本技术提出的技术方案,对工作环境要求较低且可以较准确的识别出主键相齿。
34、本技术附加的方面以及优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240730/154850.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表