基于泰伯-莫尔条纹全视场频率分析的透镜焦距高精度测量仪
- 国知局
- 2024-07-30 10:54:28
本发明涉及光学元件焦距测量领域,是一种基于泰伯-莫尔技术的全视场频率分析的高精度焦距测量仪器。
背景技术:
1、在光学、天文学和军事技术等领域,光学反射镜的精确测量不仅是这些领域发展的基石,也是推动技术创新的关键因素,同时也推动具有更长焦距和更大口径的透镜的需增长,因此开发相关精密测量技术变得尤为重要。目前,长焦距光学元件的焦距特别是长焦距测量主要依赖于传统方法和基于泰伯-莫尔条纹的技术。尽管这些方法在特定条件下表现出色,但它们在处理光学反射镜时面临诸多挑战,尤其是在高精度、长焦距光学元件测量仍然性能不足。
2、本发明提出了一种创新的方法,该方法结合了半导体光纤激光器、远心镜头和泰伯-莫尔技术的全视场频率分析等技术。半导体光纤激光器以其稳定性和优异的光束质量而闻名,为精确测量光学反射镜焦距提供了理想的光源。远心镜头的关键优点是能在聚焦图像区域,x,y,z三个维度几乎无视差成像,可以有效消除由机械系统角度误差引起的测量误差。全视场频率分析技术可以高精度提取泰伯-莫尔技术频率和宽度,从而高精度得出光学镜焦距。
3、本发明提出的方法不仅提高了测量精度,也增强了系统的稳定性和可靠性。这种集成方法的另一个优势是它的操作简便性和便携性,更适合现场测量和快速部署。
技术实现思路
1、本发明的目的在于提供一种测量精度高,稳定性好的泰伯-莫尔条纹全视场频率分析的透镜焦距测量装置。
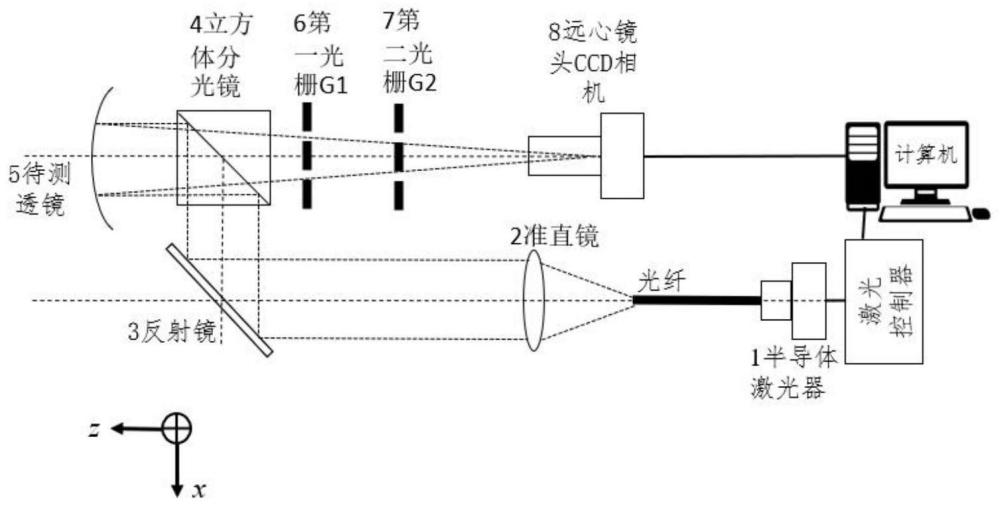
2、如图1所示,本发明的高精度焦距测量装置包括1、半导体光纤激光器;2、准直镜;3、反射镜;4、立方体分光镜;5、待测透镜;6、第一光栅g1;7、第二光栅g2;8、采用远心镜头的ccd相机;9、音圈电机滑台模组。半导体光纤激光器1发出的光经过准直镜2后形成准直激光光束,入射到反射镜3上,经反射镜3完全反射,出射光入射到立方体分光镜4,经立体分光镜4反射后,反射光线入射到待测透镜5上,待测透镜5将入射光线反射回立体分光镜4,入射光经立体分光镜4透射,入射到第一光栅g1,在设定位置形成泰伯像,第二光栅g2形成莫尔条纹,用远心镜头ccd相机8采集条纹。在图像采集过程中,第二光栅g2放置在音圈电机滑台模组9上,音圈电机每步进m步,远心镜头ccd相机8就拍摄m个泰伯-莫尔条纹全视场图像,经过相移频率分析,求出莫尔条纹频率、宽度和角度,最后根据泰伯效应原理得到待测透镜5的焦距。
3、如图2所示,激光波长为λ,第一光栅g1的栅距和第二g2的栅距为均p,第一光栅g1到待测透镜的距离为s,待测透镜的焦距为f,一束准直平行光束垂直照射第一光栅g1时,在第一光栅g1后面的一定距离处出现光栅g1的像,称为泰伯像,此时,第一光栅g1与像之间的距离为泰伯距离zt,此时有:
4、
5、在泰伯距离上,泰伯像的光强
6、
7、光栅g1泰伯像的光栅栅距p1t为:
8、
9、第二光栅g2放置在g1泰伯像位置,利用第一光栅g1的泰伯自成像与第二光栅g2的栅线存在夹角,叠加形成莫尔条纹。
10、如图3所示,设主光栅g1静止不动,指示光栅g2左右运动。光栅栅距分别为w1和w2,且w1>w2,如w1<w2,旋转坐标系到w2为垂直,重新定义w1,w2。
11、两光栅夹角为θ,栅距分别为w1和w2,且w1>w2,设
12、
13、则有,莫尔条纹倾角α:
14、
15、莫尔条纹间距m:
16、
17、如图4(a)所示,仿真如下:垂直栅线w1=4.22mm,斜栅线w2=4mm,斜直栅线夹角θ=1°,摩尔条纹倾角α=-71.4405°,摩尔宽度m=72.9501mm,摩尔宽度/栅线(m/w2)=17.2868。
18、如图4(b)所示,仿真如下:垂直栅线w1=4.22mm,斜栅线w2=4mm,斜直栅线夹角θ=18.58°,满足α=0°条件,摩尔条纹倾角α=0.0022282°,摩尔宽度m=12.5538mm,摩尔宽度/栅线(m/w2)=2.9748。
19、音圈电机步进m步(0,…,l,…m-1),每步步长δd,m=np,p为光栅栅距,此时相机拍摄m帧光栅莫尔条纹全视场图像。设音圈电机每步的相位分布为:
20、δθ=2π/n (1.7)
21、覆盖莫尔条纹周期和频率:
22、t0=m/n,f0=1/t0 (1.8)
23、相机像素(x,y)信号:
24、g(x,y,l)=r{1+v cos[φ(x,y)+l·δθ]}·w(l) (1.9)
25、其中φ是光栅莫尔的空间相位,r和v分别为莫尔条纹dc分量和对比度,w(l)为音圈电机步进采样窗口函数。其频域表达式为:
26、g(x,y,f)=q{w(f)+0.5[w(f-f0)]eiφ(x,y)+[w(f+f0)]e-iφ(x,y)} (1.10)
27、其中w(f)是音圈电机步进采样窗口的频域表达式,f0是莫尔条纹频率,q为常数。在频率f0处解调信号,有:
28、s(l)=im[w(l)e-i·l·δθ],c(l)=re[w(l)e-i·l·δθ] (1.11)
29、要求dc影响在调制频率处归零,则满足条件一:
30、
31、要求负频率影响在调制频率处归零,则满足条件二:
32、
33、
34、满足上述条件一和二的4个方程是泰伯莫尔条纹相位分析iq平衡式编码与解码条件。iq平衡式编码与解码条件方程是多解方程,要求恰当设计音圈电机相移和采样窗口函数满足其要求,本项目设计表1,确定公式(1.11)s(l)和c(l)值。
35、表1:31步π/4扫描法,表中lδθ有2套数据,对应相应的w(j)。
36、
37、此时,有i和q:
38、
39、最后,有光栅泰伯莫尔条纹的空间卷绕相位分布iq平衡式解码方程
40、φw(x,y)=arctan(i/q) (1.16)
41、它卷绕在[-π,π]之间,通过解卷绕得出光栅泰伯莫尔条纹的空间全场相位分布ф(x,y)。
42、设莫尔条纹相位的平面方程为ax+by+cφ+d=0(c≠0),其中φ为平面相位,有:
43、φ=ax+by+c (1.17)
44、
45、如有n个点需要拟合(xipha,yipha,φipha),ipha=1,2,...,n。应用最优化方法有:
46、
47、最后求出a,b,c得出平面相位分布φ(x,y),其最大梯度方向截线:
48、
49、沿最大梯度方向将光栅泰伯全场相位分布φ(x,y)切开,得光栅栅线横切面相位分布φt,则测量泰伯条纹的栅距pt:
50、φt=[zmax(xmax,ymax)-zmin(xmin,ymin)] (1.21)
51、
52、
53、上式中的pt就是式(1.3)中p1t,带入式(1.3)求出被测透镜的焦距f。
54、本发明与现有泰伯成像技术相比,具有优势在于:
55、(1)本测量装置光源系统采用的半导体激光器的光纤光源。半导体为单纵模激光器,相干长度约为400mm,可以完全满足泰伯成像的衍射要求。半导体光纤激光器通过温度控制和电流控制可以精确和稳定地调制波长到所要求的范围之内。光纤输出是点光源,点光源经过透镜可以变成平行光,光束质量非常好。
56、(2)本测量装置的图像采集系统采用了远心镜头设计,镜头远心设计的核心是将孔径光阑放置在透镜焦点之一,如图5所示。远心镜头的入口或出口光瞳或两者均位于无穷远。远心镜头产生的图像尺寸对成像物体与镜头之间的距离或像平面与镜头之间的距离或两者都不敏感。关键优点是能在聚焦图像区域,x,y,z三个维度几乎无视差成像。对于本测量装置来说,不免在安装过程中或机械设备的误差造成待测透镜和光栅镜都有会小角度倾斜,由于使用远心镜头,在这个小范围之内它对于交深变化即视场变化不敏感,因此该小角度倾斜的误差可忽略不计,从而提升测量系统的精度。
本文地址:https://www.jishuxx.com/zhuanli/20240730/154857.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表