一种基于特征值分解的有色噪声相关检测方法与流程
- 国知局
- 2024-07-30 11:01:58
本发明涉及测量测试,具体涉及一种基于特征值分解的有色噪声相关检测方法。
背景技术:
1、通常,低慢小目标的激光回波信号十分微弱,甚至可能淹没在噪声之中,使得导引头定位精度下降,甚至有可能丢失目标,因此需要研究激光半主动导引头的微弱信号检测技术。对此,国内外学者对此进行了长期的研究工作,通过分析噪声产生的原因和规律,研究被测信号的特点、相关性以及噪声的统计特性,寻找出从背景噪声中检测出有用信号的方法,取得了丰硕成果。锁定放大是主要适用于正弦信号的检测方法;相关检测是利用信号的相关性和噪声的不相关性进行信号的提取;取样积分与数字式平均则适用于具有复杂频谱信号的脉冲信号,但是由于需要对信号累积平均,因此该方法也存在检测时间长,效率较低等问题,不适合对实时性要求较高的场合;自适应噪声抵消不需要预先知道干扰噪声的统计特性,它能在逐次迭代的过程中将自身的工作状态自适应地调整到最佳状态,对抑制宽带噪声或窄带噪声都有效;小波分析迅速发展起来,并成为一种有效的信号时频分析理论,它具有对信号按不同的尺度进行分层分析的功能,从而可以提取淹没于较强噪声中的微弱特征信号,克服了传统的傅里叶变换不能时域局部化的缺点。
2、不论是哪种微弱信号提取方法,大部分研究都是基于噪声环境为白噪声来进行的,而实际生活中理想的白噪声往往是不存在的,必然会存在有色噪声的干扰。白噪声在时域中不具有相关性,而有色噪声具有一定的相关性,这就与传统的相关检测算法原理相矛盾,此时相关检测算法并不能很好的从混有有色噪声的背景中提取出脉冲信号。
3、因此,需要一种可以有效检测出混在噪声中的微弱信号并提高其信噪比的方法。
技术实现思路
1、本发明是为了解决微弱信号提取的问题,提供一种基于特征值分解的有色噪声相关检测方法,将有色噪声通过白化矩阵进行白化处理之后再进行相关检测,可以有效检测出混在噪声中的微弱信号并提高其信噪比。
2、本发明提供一种基于特征值分解的有色噪声相关检测方法,包括以下步骤:
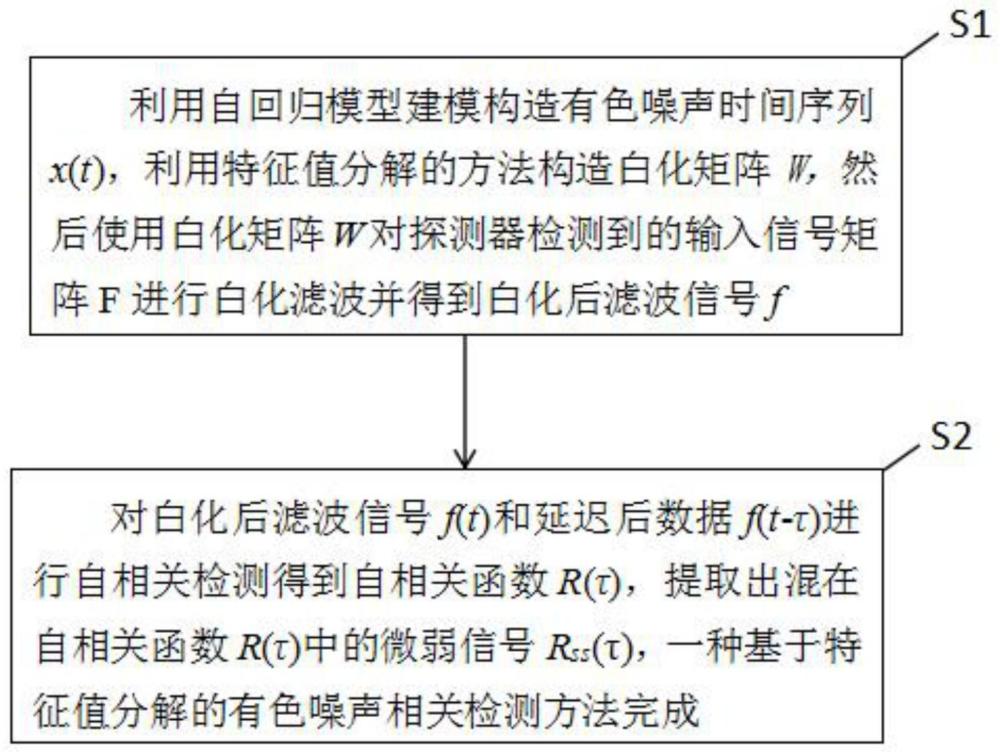
3、s1、利用自回归模型建模构造有色噪声时间序列x(t):
4、
5、其中,φ(i)为自回归系数,i=1,2,…,p,p为自回归模型的阶数,ξ(t)为零均值白噪声;
6、利用特征值分解的方法构造白化矩阵w:
7、w=qλ-1/2;
8、其中,q为有色噪声协方差矩阵∑的特征向量矩阵,λ为有色噪声协方差矩阵∑特征值组成的对角矩阵,λ=diag(λ1,λ2,…λm);
9、然后使用白化矩阵w对探测器检测到的输入信号矩阵f进行白化滤波并得到白化后滤波信号f;
10、f=fw;
11、s2、对白化后滤波信号f(t)和延迟后数据f(t-τ)进行自相关检测得到自相关函数r(τ),提取出混在自相关函数r(τ)中的微弱信号rss(τ),一种基于特征值分解的有色噪声相关检测方法完成。
12、本发明所述的一种基于特征值分解的有色噪声相关检测方法,作为优选方式,步骤s1包括以下步骤:
13、s11、利用自回归模型建模构造有色噪声时间序列x(t);
14、s12、利用特征值分解的方法构造白化矩阵w:首先对有色噪声时间序列x(t)进行采样得到噪声数据集合x,根据噪声数据集合x得到有色噪声协方差矩阵σ并进行特征值分解得到白化矩阵w;
15、s13、对白化矩阵w进行白化滤波:对白化矩阵w进行去相关并将有色噪声协方差矩阵∑进行单位化得到白化后滤波信号f。
16、本发明所述的一种基于特征值分解的有色噪声相关检测方法,作为优选方式,步骤s12中,
17、
18、其中,x为n×m的矩阵,n为一组样本数据的个数,m为采集的样本组数。
19、本发明所述的一种基于特征值分解的有色噪声相关检测方法,作为优选方式,步骤s12中,
20、
21、σ=qλqt;
22、w=qλ-1/2。
23、本发明所述的一种基于特征值分解的有色噪声相关检测方法,作为优选方式,步骤s13中,
24、wt∑w=i。
25、本发明所述的一种基于特征值分解的有色噪声相关检测方法,作为优选方式,步骤s2中,
26、f(t)=s(t)+n(t);
27、其中,s(t)为脉冲信号,n(t)为均值为零的白噪声。
28、本发明所述的一种基于特征值分解的有色噪声相关检测方法,作为优选方式,步骤s2中,将白化后滤波信号f(t)同时输入到相关接收机的2个通道,其中一路经过延迟电路使f(t)延迟时间τ,然后将延迟后数据f(t-τ)和未经延迟的f(t)送入乘法器后将乘积积分再取平均值得到f(t)的自相关函数r(τ)。
29、本发明所述的一种基于特征值分解的有色噪声相关检测方法,作为优选方式,步骤s2中,
30、r(τ)=rss(τ)+rsn(τ)+rns(τ)+rnn(τ);
31、其中,
32、
33、
34、
35、
36、rsn(τ)=rns(τ)=0,rnn(τ)为噪声自相关函数;
37、随着τ的增大,rnn(τ)衰减至零。
38、本发明所述的一种基于特征值分解的有色噪声相关检测方法,作为优选方式,基于特征值分解的有色噪声相关检测方法使用的检测系统包括:缓冲放大电路、定时脉冲跟随电路,与缓冲放大电路的输出端、定时脉冲跟随电路的输出端均电连接的相关器,与相关器输出端依稀连接的信号保持器、模数转换器和数字处理器,定时脉冲跟随电路的输出端与模数转换器电连接;
39、缓冲放大电路的输入端为与激光回波信号光连接的探测器,定时脉冲跟随电路的输入端为激光照射器重频脉冲信号f0,数字处理器输出微弱信号rss(τ)。
40、本发明所述的一种基于特征值分解的有色噪声相关检测方法,作为优选方式,探测器为四象限激光探测器,缓冲放大电路和相关器均为4路,缓冲放大电路为可变增益缓冲放大器,定时脉冲跟随电路与每一个相关器均电连接,模数转换器为高速模数转换器;
41、激光回波信号通过光学系统将调制过的光源离焦照射到四象限探测器上形成光斑,四象限探测器通过光电效应将光能量转化为电信号输出4路模拟信号,4路模拟信号分别经缓冲放大电路进行缓冲放大后进入相关器进行相关运算,然后经信号保持器传递给模数转换器采集生成数字信号,再由数字处理器采集运行进行偏差解算;
42、激光照射器重频脉冲信号f0在导引头开始工作前,由地面接口引入,激光照射器重频脉冲信号f0与激光回波信号同步,经过定时脉冲跟随电路生成检测触发脉冲信号并触发模数转换器,定时脉冲电路含进行相位延迟的补偿。
43、本发明在相关检测算法的基础上对有色噪声进行白化滤波,从而实现混有有色噪声的微弱信号检测,主要是通过如下技术方案予以实现的:
44、(1)利用半实物仿真平台,获取激光回波数据,并通过解算导引头失调角信息来判断回波数据中是否存在有色噪声,具体方法如下:
45、步骤1,将激光照射器和激光导引头分别架在两个经纬仪上,并对两个经纬仪进行调零,使两者相隔10m以上的距离,尽可能减小后向散射对实验造成的影响。然后选取远处某一固定点作为目标照射点,通过激光发射器上的目镜装置观察目标,使激光发射器对准目标进行照射,导引头则通过经纬仪上的目镜装置进行调整,使导引头对准目标来接收激光反射回波;
46、步骤2,如图1所示,根据目标光斑相对四象限探测器光轴中心在水平方向的偏差信号得到导引头偏航方向的失调角ez,光斑相对探测器光轴中心在竖直方向的偏差信号得到导引头俯仰方向的失调角ey,公式如下:
47、
48、其中,k为比例系数,u1、u2、u3和u4分别表示放大后a,b,c,d四个象限各自的输出电压值,s1、s2、s3和s4分别表示光斑在各象限的面积。
49、步骤3,对俯仰方向与偏航方向测得的数据进行频率谱密度分析图,根据白噪声与有色噪声的特性可以知道,白噪声的频谱在各频率的幅值都比较平均,且分布均匀,而有色噪声则会有较为明显的峰值。测得的数据可以看出明显的峰值存在,说明背景噪声中包含有色噪声。
50、(2)实际生活中往往会存在有色噪声的干扰,针对回波数据中存在有色噪声干扰的情况,采用一种基于特征值提取的有色噪声相关检测方法来进行微弱信号的提取,具体方法如下;
51、步骤1,利用自回归模型(autoregressive,ar)来进行建模构造有色噪声时间序列x(t),表达式如下:
52、
53、其中,φ(i)为自回归系数,i=1,2,…p,p为ar模型的阶数,ξ(t)为零均值白噪声。
54、步骤2,利用特征值分解的方法来构造一个白化矩阵;
55、根据上述有色噪声时间序列进行采样,一组样本有n个数据,共采集m组样本,假设噪声数据集合为x,
56、
57、所有样本可以表示成一个n×m的矩阵。则有色噪声的协方差矩阵σ表示为:
58、
59、由于∑是对称方阵,因此可以进行特征值分解:
60、σ=qλqt;
61、q:∑的特征向量组成的矩阵;
62、λ:∑的特征值组成的对角矩阵,λ=diag(λ1,λ2,…λm);
63、构造白化矩阵w:
64、w=qλ-1/2;
65、步骤3,对有色噪声模型进行的白化滤波,实际上是指对有色噪声序列进行去相关,且噪声协方差被单位化的过程。
66、此时,wt∑w=i,即白化后的协方差矩阵已经被单位对角化,成为理想的空间白噪声背景。将探测器检测到的输入信号表示为矩阵f,再乘以白化矩阵w,即得到白化后的信号f:
67、f=fw;
68、(3)对白化滤波后的数据进行自相关检测,提取出混在有色噪声中的微弱信号,具体方法如下;
69、用s(t)表示脉冲信号,n(t)表示均值为零的白噪声,则叠加后的信号表示为:
70、f(t)=s(t)+n(t);
71、如图3所示,将f(t)同时输入到相关接收机的2个通道,其中一路经过延迟电路,使它延迟时间τ,然后将经延迟后的f(t-τ)和未经延迟的f(t)送入乘法器,再将乘积积分,取平均值,从而得到f(t)的自相关函数r(τ)。
72、
73、由于信号与噪声的不相关性,rsn(τ)=rns(τ)=0,根据自相关函数的性质知,随着τ的增大,噪声自相关函数rnn(τ)衰减至零,所以
74、r(τ)=rss(τ);
75、因此,结果使包含着s(t)信息的rss(τ)相对突出,从而达到提取有用信号的目的。
76、(4)分析对比传统相关检测算法与基于特征值分解的相关检测算法对有色噪声背景中微弱信号的提取情况。
77、本发明针对一些低慢小目标的激光回波信号中除了有热噪声和散弹噪声这样的白噪声,还存在有色噪声的实际场景,对其进行微弱信号检测,首先将有色噪声进行基于特征值分解的白化滤波,再通过相关检测算法将淹没在噪声中的微弱信号提取成功。本发明适用于低慢小目标回波信号微弱及背景噪声复杂的信号处理问题。
78、本发明具有以下优点:
79、(1)本发明利用自回归模型来构造有色噪声模型,较好的模拟了实际场景中存在有色噪声的信号环境;
80、(2)本发明利用特征值分解的方法构造白化矩阵,实现了有色噪声的白化滤波,将噪声背景优化为较为纯净的白噪声环境;
81、(3)本发明利用自相关检测算法,解决了微弱信号的有效提取问题。
82、(4)本发明适用于低慢小目标的激光回波信号微弱且背景噪声复杂的信号检测问题,采用基于特征值分解的有色噪声自相关检测方法,实现微弱信号的有效检测,提高信号的信噪比,使得制导指令的输出更加准确,为导弹更低的脱靶量奠定基础。
本文地址:https://www.jishuxx.com/zhuanli/20240730/155150.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表