一种星载光纤陀螺自适应数据采集处理装置及方法与流程
- 国知局
- 2024-07-30 11:07:55
本技术属于航天领域,涉及光纤陀螺数据采集,尤其涉及一种星载光纤陀螺自适应数据采集处理装置及方法。
背景技术:
1、光纤陀螺由于其精度高、零漂及角速率随机游走小、环境适应性好、抗辐照能力强等特点,作为空间运动平台关键反馈检测敏感器被广泛应用。目前宇航光纤陀螺多采用全双工rs442串行总线通信。当光纤陀螺接收到上位机下传的陀螺取数指令后,解析指令将当前角速率信息及陀螺遥测信息上传给上位机,上位机为光纤陀螺提供±5v电源。
2、随着空间光电跟踪平台在空间目标跟踪成像、空间微波/激光通信等技术领域的应用,小型化、低成本、高性能的空间运动平台是发展的必然趋势。光纤陀螺组件作为空间运动平台关键部件,采用至少3个光纤陀螺敏感载体x、y、z角速率信息,用以消除卫星运动对空间运动平台精确跟踪目标的干扰。卫星载荷为两个或多个空间运动平台时,如何充分利用光纤陀螺组件,实现多平台实时数据共享,是平台小型化、低成本、高可靠的发展需求。
3、传统技术方案是每个空间运动平台包含一套光纤陀螺组件,通过点对点全双工rs422串口通信,获取光纤陀螺角速率信息;多个平台应用时,采用多套光纤陀螺组件为各平台提供独立的角速率信息。传统的方案存在一些问题:
4、1)多个空间运动平台获取载体角速率信息时,光纤陀螺数量相应增多,但功能相同,光纤陀螺利用率低,不利于平台小型化、低成本;
5、2)每个空间运动平台需提供6路点对点rs422总线,实现平台控制与光纤陀螺组件通信,占用平台控制系统rs422接口资源,对平台控制系统数据处理能力要求高。
技术实现思路
1、为了解决上述现有技术的不足,本技术提供一种星载光纤陀螺自适应数据采集处理装置及方法,解决单套光纤陀螺组件与多个空间运动平台的通信,同时为多个空间运动平台提供实时姿态数据反馈,在保证可靠性的同时,减少平台与陀螺接口数量,降低平台成本,便于平台小型化设计的问题。
2、为了实现上述目的,本发明采用以下技术:
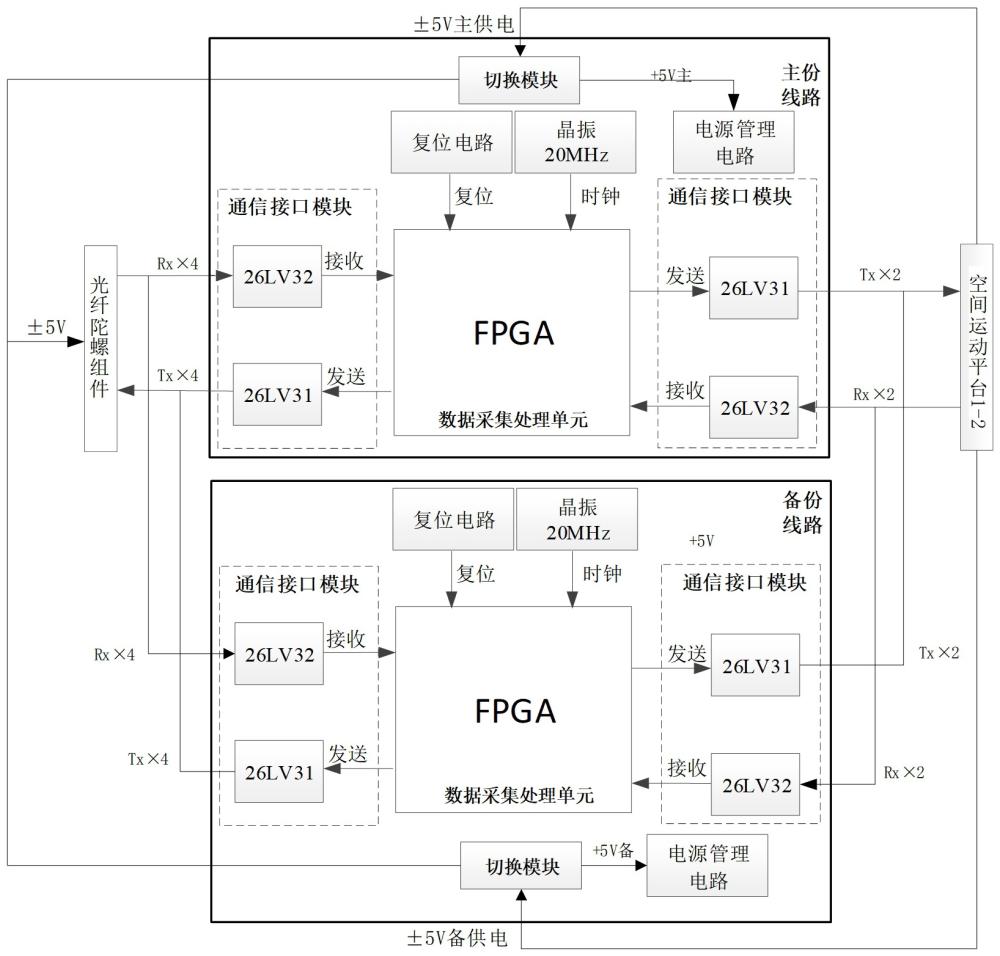
3、一种星载光纤陀螺自适应数据采集处理装置,设于光纤陀螺组件与多套空间运动平台之间,光纤陀螺组件包括多轴独立光纤陀螺,所述装置包括结构相同的主份线路和备份线路;
4、主份线路和备份线路均包括切换模块、通信接口模块、数据采集处理单元;
5、切换模块与光纤陀螺组件和多套空间运动平台连接,用于将每套空间运动平台提供的电源对应提供给主份线路/备份线路内各模块供电,完成主份线路/备份线路供电的切换,并提供给光纤陀螺组件供电;
6、数据采集处理单元通过通信接口模块连接光纤陀螺组件和多套空间运动平台以实现串行数据收发;
7、数据采集处理单元用于通过通信接口模块同时采集光纤陀螺组件的多路陀螺数据,并用于将多路串行陀螺数据进行串并转换,均值抽取滤波后,重新组帧;并用于通过通信接口模块获取空间运动平台串行平台取数指令,根据平台取数指令将重新组帧的数据通过通信接口模块发送给空间运动平台。
8、数据采集处理单元采用fpga实现,fpga内的逻辑功能模块包括主控模块、数据接收解析模块、自适应数据处理模块、数据请求模块、指令仲裁模块、数据发送模块、指令接收解析模块;
9、数据请求模块用于在接收到主控模块的启动陀螺取数指令后,将陀螺取数指令转换为串行数据,通过通信接口模块周期性下发给光纤陀螺组件;
10、数据接收解析模块用于接收光纤陀螺组件在收到周期性的陀螺取数指令后,通过通信接口模块下传的多路陀螺数据及陀螺遥测状态信息,并进行串并转换后发送给自适应数据处理模块;
11、自适应数据处理模块用于对当前接收的多路并行陀螺数据进行缓存,并记录收到的陀螺数据次数,并对每次收到的陀螺数据进行累加得到累加后的陀螺数据;并用于根据主控模块发送的组帧标志,将当前累加的多路陀螺数据分别与记录的次数相除以计算多个陀螺平均角速率,并将当前帧的陀螺遥测状态信息与计算所得的陀螺平均角速率进行组帧;
12、主控模块用于在判断到陀螺数据的累加次数超过预设阈值时,或自适应数据处理模块完成组帧时,向自适应数据处理模块发送清零标志,以使自适应数据处理模块将陀螺数据及累加次数进行清零,重新进行累加;
13、指令接收解析模块用于解析空间运动平台通过通信接口模块发送的平台取数指令,完成串并转换后送入指令仲裁模块;其中,多套空间运动平台的平台取数指令依据各空间运动平台需求发送,为异步指令;
14、指令仲裁模块用于依据预先对各套空间运动平台定义的优先级,向主控模块推送对应的平台取数指令,主控模块用于根据指令仲裁模块推送的平台取数指令向自适应数据处理模块发送所述组帧标志,并用于在组帧完成后获取组帧数据;
15、数据发送模块用于将主控模块获取的组帧数据通过通信接口模块发送到对应的空间运动平台。
16、一种星载光纤陀螺自适应数据采集处理方法,通过所述的星载光纤陀螺自适应数据采集处理装置进行实现,包括步骤:
17、装置上电复位预定时长后,主控模块进行参数初始化设置,包括设置陀螺取数指令周期、陀螺取数指令值及其波特率,设置空间运动平台取数指令值及其波特率;在初始化设置完成后启动数据请求模块和指令接收解析模块;
18、数据请求模块在接收到主控模块的启动陀螺取数指令后,将陀螺取数指令转换为串行数据,通过通信接口模块周期性下发给光纤陀螺组件;
19、数据接收解析模块接收光纤陀螺组件在收到周期性的陀螺取数指令后,通过通信接口模块下传的多路陀螺数据及陀螺遥测状态信息,并进行串并转换后发送给自适应数据处理模块;
20、自适应数据处理模块对当前接收的多路并行陀螺数据进行缓存,并记录收到的陀螺数据次数,并对每次收到的陀螺数据进行累加得到累加后的陀螺数据;并根据主控模块发送的组帧标志,将当前累加的多路陀螺数据分别与记录的次数相除以计算多个陀螺平均角速率,并将当前帧的陀螺遥测状态信息与计算所得的陀螺平均角速率进行组帧;
21、主控模块在判断到陀螺数据的累加次数超过预设阈值时,或自适应数据处理模块完成组帧时,向自适应数据处理模块发送清零标志,以使自适应数据处理模块将陀螺数据及累加次数进行清零,重新进行累加;
22、指令接收解析模块解析空间运动平台通过通信接口模块发送的平台取数指令,完成串并转换后送入指令仲裁模块;其中,多套空间运动平台的平台取数指令依据各空间运动平台需求发送,为异步指令;
23、指令仲裁模块依据预先对各套空间运动平台定义的优先级,向主控模块推送对应的平台取数指令,主控模块根据指令仲裁模块推送的平台取数指令向自适应数据处理模块发送所述组帧标志,并在组帧完成后获取组帧数据;
24、数据发送模块将主控模块获取的组帧数据通过通信接口模块发送到对应的空间运动平台。
25、本发明有益效果在于:
26、充分利用星载光纤陀螺组件作为多个空间运动平台运动控制共享敏感器,减少了陀螺使用数量,降低了空间运动平台成本;通过高频定周期对陀螺数据采集、组帧实现多串口数据输入合并为单串口数据输出,减少了平台串口使用量,提高平台运行效率;对采集到的陀螺数据通过均值抽取滤波后输出,自适应平台读取指令周期,同时降低了光纤陀螺数据输出噪声,保证了平台转动精度;通过硬件线路冷备设计提高了产品的可靠性,具有体积小、重量轻、易实现等特点。
本文地址:https://www.jishuxx.com/zhuanli/20240730/155558.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表