一种基于自适应相位梯度估计的相位滤波方法及系统与流程
- 国知局
- 2024-07-30 11:14:23
本发明属于合成孔径雷达领域,尤其涉及一种基于自适应相位梯度估计的相位滤波方法及系统。
背景技术:
1、干涉合成孔径雷达(interferometric synthetic aperture radar, insar)是一种利用相位信息获取地球数字表面模型(digital surface model, dsm)的新型对地观测手段,干涉相位则是insar数据处理过程中至关重要的中间产品,干涉相位的质量将直接影响最终dsm产品的精度。
2、在实际应用中,受多种去相干因素的影响,将配准后的主辅影像共轭相乘处理后获取的原始干涉相位存在大量的随机噪声,若不进行相位滤波会显著加大后续的相位解缠处理难度,进而影响dsm产品精度。
3、干涉相位滤波的本质是选择与待滤波像素独立同分布的样本点,对其作集合平均处理,从而实现降低干涉相位的随机噪声分量的目标,在实际处理中,由于难以通过多次观测获取大量的独立同分布点,因此通过采用空间平均代替集合平均的方式进行相位滤波,而又由于局部地形剧烈变化,导致待滤波像素与周围像素可能不满足独立同分布假设,若直接对其进行空间平均会导致地形相位信息的损失,因此需要研究合适的滤波方法,提高滤波样本的一致性,从而提高相位滤波精度,降低地形细节信息的损失。
4、近些年来,国内外众多学者投身于干涉合成孔径雷达相位滤波技术研究中,文献“李锦伟.高分辨星载sar干涉/极化处理关键技术研究[d].西安电子科技大学,2015.”分析了干涉相位滤波的要求和性能评价指标,并给出了一种基于fft的局部条纹频率估计方法,提高了滤波窗口内样本的一致性;文献“葛令贵.高效高精度insar自适应滤波方法与工程化应用研究[d].西安电子科技大学,2018.”提出了相位噪声标准差辅助滤波窗口智能设定和基于场景特点自主选择滤波算法。
技术实现思路
1、为了解决上述问题,本发明提出了一种基于自适应相位梯度估计的相位滤波方法,包括以下步骤:
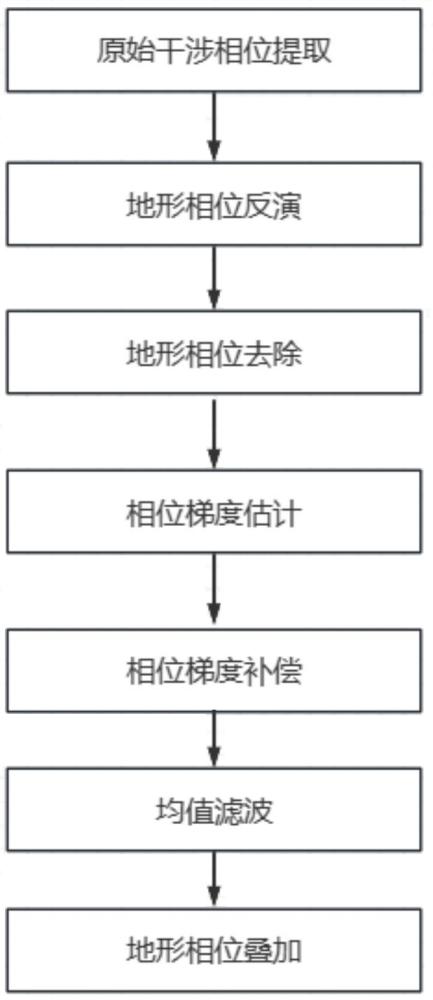
2、10)原始干涉相位提取:将配准后的主辅影像共轭相乘,并取其相角,即可提取出原始干涉相位;
3、20)地形相位反演:在原始干涉相位中,等间隔均匀选取若干像素点,首先通过先验dsm和主星轨道信息作正向定位,得到选取像素点的地理坐标以及其对应的主星轨道位置,然后基于选取像素点地理坐标、先验dsm和辅星轨道参数作反向定位,得到其对应的辅星轨道位置,再基于对应的主辅星轨道位置和选取像素点地理坐标即可计算选取像素点对应的主辅星相位,二者作差即可获取选取像素点的地形相位,最后将选取像素点的地形相位插值为整幅影像的地形相位;
4、30)地形相位去除:将原始干涉相位与插值后的地形相位相减,即得到去除地形相位后的剩余相位;
5、40)相位梯度估计:基于二维频谱幅度最大原则,自适应估计剩余相位的梯度信息;
6、50)相位梯度补偿:将剩余相位与二维相位梯度估计值作差,得到相位梯度补偿后的相位;
7、60)均值滤波:将相位梯度补偿后的相位作均值滤波处理,得到均值滤波后的相位;
8、70)地形相位叠加:将均值滤波后的相位与地形相位叠加,即可得到最终的滤波后相位。
9、进一步地,所述选取像素点的地形相位表达式为:
10、
11、其中,p(m,n)为第m行第n列的像素点的坐标,m,n为正整数,tarpos(m,n)为正向定位得到像素点的地理坐标, pt(m,n) 为tarpos(m,n)对应的主星轨道位置,pr(m,n)为反向定位得到tarpos(m,n)对应的辅星轨道位置,π表示圆周率,norm[·]表示向量取模,λ表示载波波长。
12、进一步地,剩余相位的表达式为:
13、
14、其中,表示剩余相位,表示插值后的地形相位。
15、进一步地,所述相位梯度估计具体包括以下步骤:
16、将剩余相位作二维傅里叶变换,取二维频谱中幅度最大值对应的频率值即为二维相位梯度估计值;二维相位梯度估计值的表达式为:
17、(fx,fy)= argmax{s(fx,fy)}
18、其中,fx表示方位向相位梯度估计值,fy表示距离向相位梯度估计值,argmax(·)表示取二维频谱幅度最大值,s(fx,fy)表示剩余复相位的二维频谱。
19、进一步地,均值滤波的表达式为:
20、
21、
22、其中,real(·)表示相位补偿后的实部数据,imag(·)表示相位补偿后的虚部数据,m表示方位向像素坐标,n表示距离向像素坐标,mean[·]表示取均值,win表示均值滤波的半窗长。
23、还提供了一种基于自适应相位梯度估计的相位滤波系统,包括原始干涉相位提取模块、地形相位模块、地形相位去除模块、相位梯度估计模块、相位梯度补偿模块、均值滤波模块、地形相位叠加模块,上述模块根据上述任一方法进行相位滤波。
24、本发明与现有技术相比,具备的优点在于:
25、本发明可实现高效高精度的干涉合成孔径雷达相位滤波,基于此进行后续的干涉处理便可获取高质量的dsm产品,在全球地形测绘、形变监测和变化检测等方面具有重大应用前景。
技术特征:1.一种基于自适应相位梯度估计的相位滤波方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于自适应相位梯度估计的相位滤波方法,其特征在于,所述选取像素点的地形相位表达式为:
3.根据权利要求1所述的基于自适应相位梯度估计的相位滤波方法,其特征在于,剩余相位用表示,其表达式为:
4.根据权利要求1所述的基于自适应相位梯度估计的相位滤波方法,其特征在于,所述相位梯度估计具体包括以下步骤:
5.根据权利要求1所述的基于自适应相位梯度估计的相位滤波方法,其特征在于,均值滤波的表达式为:
6.一种基于自适应相位梯度估计的相位滤波系统,其特征在于,包括原始干涉相位提取模块、地形相位模块、地形相位去除模块、相位梯度估计模块、相位梯度补偿模块、均值滤波模块、地形相位叠加模块,上述模块根据权利要求1-5的任一方法进行相位滤波。
技术总结本发明公开了一种基于自适应相位梯度估计的相位滤波方法及系统,所述方法包括:原始干涉相位提取;地形相位反演;地形相位去除;相位梯度估计;相位梯度补偿;均值滤波;地形相位叠加。本发明能实现高效高精度性的干涉合成孔径雷达相位滤波,更好的服务于后续相位解缠环节,并最终生产出高质量的DSM产品。技术研发人员:夏犇,刘爱芳,葛仕奇,李世忠,陈刚,丛琳受保护的技术使用者:中国电子科技集团公司第十四研究所技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/155936.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表