基于子阵列信号增强的多声源定位方法和装置与流程
- 国知局
- 2024-07-30 11:14:17
本发明属于阵列信号处理领域,具体涉及一种基于子阵列信号增强的多声源定位方法和装置。
背景技术:
1、空气声阵列声学成像技术广泛应用于航空、风电、无人机等领域的噪声源识别、目标探测和故障诊断。基于延迟求和波束成形的声源定位方法受有限孔径和离散麦克风空间采样的影响,声源定位分辨率较低。提高声源定位的分辨率的方法包括增大声阵列的孔径、改进声源定位算法,以及采用合成孔径算法等。随着边缘计算力的提高和硬件成本的降低,由子阵列组成的分布式阵列,具有声源定位频带更宽、探测空间范围更大、实时性更好等优势,日益受到研究和关注。
2、文献1“source localization with distributed sensor arrays and partialspatial coherence, ieee transactions on signal processing, 2004, 52(3): 601-616.”中提出了利用子阵列进行声源方位估计,并将每个子阵列的方位估计值,连同每个子阵列中一个麦克风的信号,送到数据中心进行融合估计的方法。这种方法减小了子阵列信号传输到数据中心所需的带宽,但传输的单个麦克风信号丢失了大量有用信息。文献2“multiple acoustic source localization in microphone array networks, ieee/acmtransactions on audio, speech, and language processing, 2020, 29: 334-347.”采用神经网络模型和随机分布式麦克风阵列对室内多个说话人进行声源定位,主要对不同子阵列的距离信息进行了编码,以减小混响和噪声环境下误检测。中国专利cn202211116453.1提供了一种新型稀疏阵列的doa估计方法,采用子阵列构建新型差分共阵和求和共阵,对新型嵌套阵列协方差矩阵进行向量化后,采用music方法实现doa估计。已有的子阵列声源定位方法,未能充分利用子阵列的有效信息来提升声源定位的精度。
技术实现思路
1、鉴于上述,本发明的目的是提供一种基于子阵列信号增强的多声源定位方法和装置,通过子阵列对峰值最大的声源信号在子阵列的参考点进行增强,对其他干扰信号进行抑制,再利用增强后的信号构建大孔径阵列的复声压向量,实现大孔径高分辨声源定位。
2、为实现上述发明目的,实施例提供的一种基于子阵列信号增强的多声源定位方法,包括以下步骤:
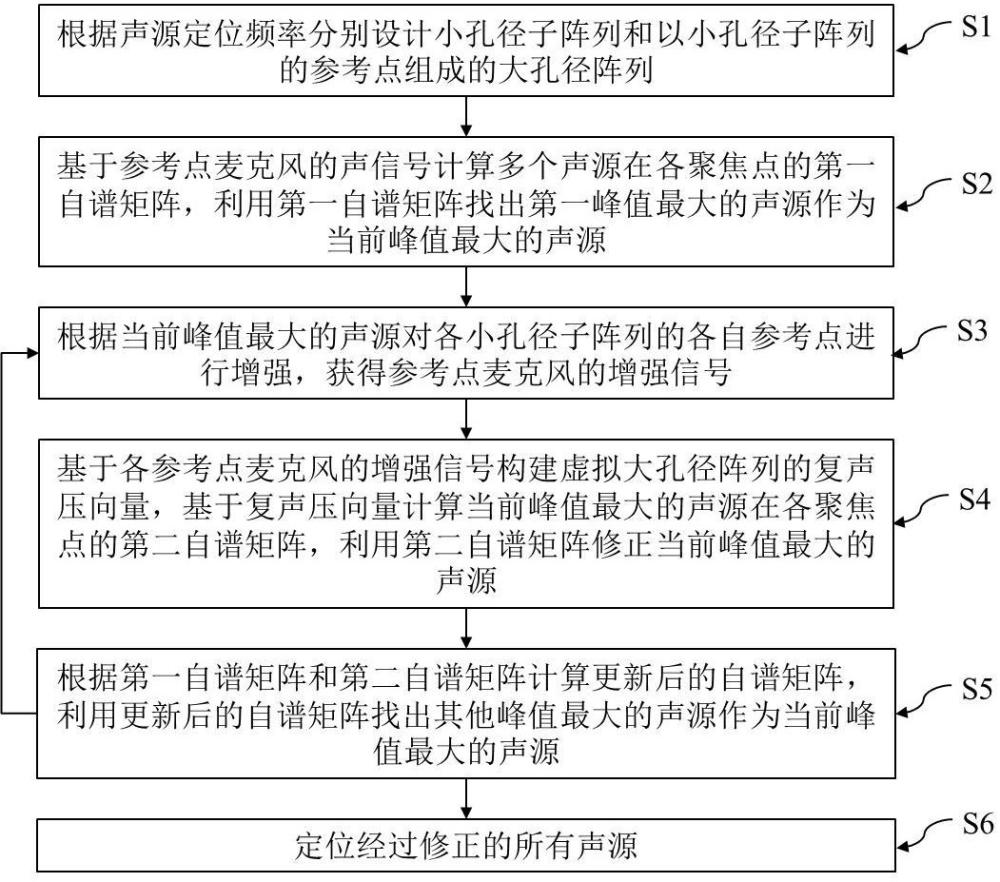
3、步骤1,根据声源定位频率分别设计小孔径子阵列和以小孔径子阵列的参考点组成的大孔径阵列,其中,小孔径子阵列的阵元处和参考点处均设有麦克风;
4、步骤2,基于参考点麦克风的声信号计算多个声源在各聚焦点的第一自谱矩阵,利用第一自谱矩阵找出第一峰值最大的声源作为当前峰值最大的声源;
5、步骤3,根据当前峰值最大的声源对各小孔径子阵列的各自参考点进行增强,获得参考点麦克风的增强信号;
6、步骤4,基于各参考点麦克风的增强信号构建虚拟大孔径阵列的复声压向量,基于复声压向量计算当前峰值最大的声源在各聚焦点的第二自谱矩阵,利用第二自谱矩阵修正当前峰值最大的声源;
7、步骤5,根据第一自谱矩阵和第二自谱矩阵计算更新后的自谱矩阵,利用更新后的自谱矩阵找出其他峰值最大的声源作为当前峰值最大的声源;
8、步骤6,根据声源数量,重复步骤3-步骤5,定位经过修正的所有声源。
9、优选地,根据声源定位频率分别设计小孔径子阵列和以小孔径子阵列的参考点组成的大孔径阵列,包括:
10、将多个阵元呈圆环排布形成小孔径子阵列,并将小孔径子阵列所在圆环的圆心设置为参考点,将所有参考点呈圆环排布形成大孔径阵列,同时进行以下约束:
11、小孔径子阵列的孔径d和大孔径阵列的麦克风间距 l之间应满足如下关系:
12、;
13、第 i个小孔径子阵列的麦克风间距和声源定位频率之间应满足如下关系:
14、;
15、大孔径阵列的麦克风间距 l、孔径 d、以及声源定位频率之间应满足如下关系:
16、;
17、其中, c表示声速, i表示小孔径子阵列索引, i=1,2,3,4,…, i, i表示小孔径子阵列的总数。
18、优选地,基于参考点麦克风的声信号计算多个声源在各聚焦点的第一自谱矩阵,利用第一自谱矩阵找出第一峰值最大的声源,包括:
19、将参考点麦克风的声信号转换为频域,组成复声压向量:
20、;
21、其中,表示第 i个参考点麦克风的复声压, t表示矩阵转置,表示角频率, i=1,2,3,4,…, i, i表示小孔径子阵列的总数;
22、基于复声压向量计算大孔径阵列的互谱矩阵:
23、;
24、其中, h表示矩阵的共轭转置;
25、对互谱矩阵进行特征值分解,并采用music波束成形方法计算多个声源在各聚焦点的第一自谱矩阵:
26、;
27、其中,由的最小个特征值对应的特征向量组成,表示已知声源数量,表示小孔径子阵列参考点麦克风到各聚焦点的导向矢量;
28、基于第一自谱矩阵找到第一峰值最大对应的声源的位置坐标。
29、优选地,根据当前峰值最大的声源对各小孔径子阵列的各自参考点进行增强,获得参考点麦克风的增强信号,包括:
30、对于第 i个小孔径子阵列,将不含参考点麦克风信号的其余阵元的频域信号构成信号向量:
31、;
32、其中,表示第 i个小孔径子阵列中第 j个阵元麦克风的复声压,,表示小孔径子阵列中的阵元数量, t表示矩阵转置;
33、基于频域信号向量计算第 i个小孔径子阵列的互谱矩阵:
34、;
35、基于互谱矩阵和当前峰值最大的声源计算mvdr波束滤波系数:
36、;
37、其中,表示第 i个小孔径子阵列指向峰值最大声源位置的导向矢量;
38、基于mvdr波束滤波系数,采用mvdr波束成形方法计算各小孔径子阵列在各自参考点的增强信号:
39、;
40、其中, h表示矩阵的共轭转置。
41、优选地,基于各参考点麦克风的增强信号构建虚拟大孔径阵列的复声压向量,包括:
42、;
43、其中,表示复声压向量,表示第 i个小孔径子阵列的增强信号, t表示矩阵转置, i=1,2,3,4,…, i, i表示小孔径子阵列的总数。
44、优选地,基于复声压向量计算当前峰值最大的声源在各聚焦点的第二自谱矩阵,并利用第二自谱矩阵修正当前峰值最大的声源,包括:
45、基于复声压向量计算虚拟大孔径阵列的互谱矩阵:
46、;
47、对进行特征值分解,并采用music波束成形方法计算峰值最大的声源在各聚焦点的第二自谱矩阵:
48、;
49、其中,由的最小个特征值对应的特征向量组成,表示已知声源数量,表示小孔径子阵列参考点麦克风到各聚焦点的导向矢量, h表示矩阵的共轭转置;
50、根据第二自谱矩阵找出峰值最大对应的坐标,修正当前峰值最大的声源的位置坐标。
51、优选地,根据第一自谱矩阵和第二自谱矩阵计算更新后的自谱矩阵,利用更新后的自谱矩阵再次找出其他峰值最大的声源位置,包括:
52、将第一自谱矩阵减去第二自谱矩阵,得到更新后的自谱矩阵:
53、;
54、基于更新后的自谱矩阵找出其他峰值最大对应的坐标,为其他峰值最大的声源的位置坐标。
55、为实现上述发明目的,本发明实施例提供了一种基于子阵列信号增强的多声源定位装置,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述一个或多个处理器执行所述可执行代码时,实现上述基于子阵列信号增强的多声源定位方法。
56、为实现上述发明目的,本发明实施例提供了一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时,实现上述基于子阵列信号增强的多声源定位方法。
57、为实现上述发明目的,本发明实施例提供了一种计算机产品,其包含计算机程序,所述计算机程序被处理器执行时,实现上述基于子阵列信号增强的多声源定位方法。
58、与现有技术相比,本发明具有的有益效果至少包括:
59、本发明在构建由小孔径子阵列和大孔径阵列组成的阵列结构基础上,利用小孔径子阵列对峰值最大的声源信号在小孔径子阵列的参考点进行增强,构成虚拟大孔径阵列的复声压向量,在提高阵列孔径的同时,减小了多个声源相关性引起的声源定位误差,并通过迭代的方法将多声源定位问题转化为单声源定位问题,实现对大孔径高分辨声源定位。
本文地址:https://www.jishuxx.com/zhuanli/20240730/155927.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表