一种基于毫米雷达波的自动驾驶调测方法与流程
- 国知局
- 2024-07-30 11:14:41
本发明涉及自动驾驶,具体为一种基于毫米雷达波的自动驾驶调测方法。
背景技术:
1、自动驾驶技术,也称为无人驾驶或自动驾驶汽车技术,使车辆能够在没有人为干预的情况下行驶。该技术结合了多种先进的硬件和软件技术,包括传感器、机器学习算法、计算机视觉、人工智能(ai)、雷达、激光雷达(lidar)、全球定位系统(gps)等。早在1950年,自动驾驶的概念开始出现。1956年,通用汽车在“未来之旅”展览中展示了一款概念车,设想未来的汽车可以由电子系统控制。研究主要集中在自动控制和导航系统,斯坦福研究所的sri shakey是一个早期的移动机器人,展示了自动导航和环境感知的基本原理。随着历史的演变,科学技术的发展,如:更先进的感知系统(如lidar、摄像头、雷达等)、高性能计算平台、人工智能算法(特别是深度学习)、高精度地图和v2x通信技术。现在的车辆自动驾驶技术已经可以初步实现,在一些场景中可以看到自动驾驶车辆已经取代了人工驾驶进行工作,但是自动驾驶技术依旧存在一些问题,包括对于障碍物的自动智能躲避,且天气情况导致车辆的行驶环境多变,自动驾驶技术在不同天气中无法根据不同环境进行智能避障;因此如何使车辆在复杂多变的环境中实现对不同障碍物的躲避,提高车辆行驶的安全性至关重要。
技术实现思路
1、本发明的目的在于提供一种基于毫米雷达波的自动驾驶调测方法,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:
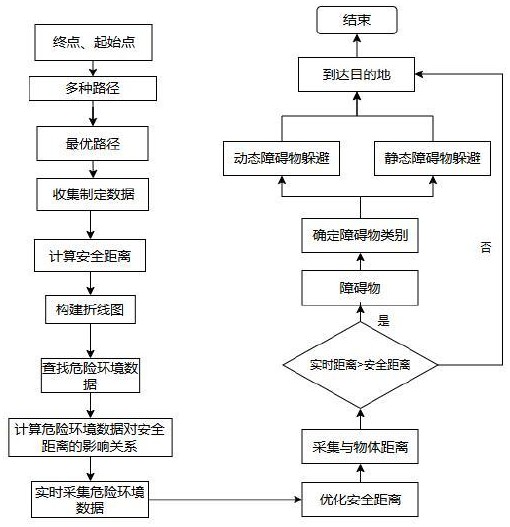
3、一种基于毫米雷达波的自动驾驶调测方法,所述方法包括以下步骤:
4、s100、采集用户设置的终点和车辆起始点,利用网络地图选择车辆到达终点的路线,通过计算距离和时间筛选出最优路径;
5、进一步的,通过计算距离和时间筛选出最优路径的具体步骤为:
6、s101、用户主动设置车辆目标终点,车辆根据网络地图确定自身位置,并查找到达终点的路径为,表示查找的第1、2、3、...、n种车辆行驶路径,n为正整数;提取n种不同的车辆行驶路径中红绿灯个数为,表示第1、2、3、...、n种车辆行驶路径中的红绿灯个数;
7、s102、将查找的车辆行驶路径进行分段,将车辆行驶路径中每个拐点作为划分点对车辆行驶路径进行划分,设每个车辆行驶路径中存在的拐点个数为,表示第1、2、3、...、n种车辆行驶路径中的拐点个数,设利用拐点划分的一个车辆行驶路径的路径段为,表示车辆行驶路径被拐点划分的第1、2、3、...、s_g-1个路径段,s_g-1为正整数;利用计算机在网络中查找得到每种车辆行驶路径中每个路径段的最大车速v;
8、s103、计算每种车辆行驶路径到达终点所需要的时间,公式为:
9、;
10、公式中,t表示每种车辆行驶路径到达终点的时间,l_d表示车辆行驶路径中每个路径段的路径长度,v表示车辆行驶路径中每个路径段的最大车速;s表示每种车辆行驶路径中红绿灯个数,m表示每种车辆行驶路径中红绿灯的最大等待时间;;经过计算得到每种车辆行驶路径到达终点所需的时间为,表示第1、2、3、...、n种车辆行驶路径中到达终点所需的时间,选取n种车辆行驶路径中到达终点所需时间最小的路径作为车辆到达终点的最优路径l_best。
11、对车辆到达终点的路径进行筛选,当存在多种行驶路径时,为了减少行驶时间,增加车辆的工作效率;对所有路径中红绿灯、道路车速等进行收集计算,可以计算得到每条路径的最大行驶时间,清晰的查找出花费时间最短的最优路径。
12、s200、收集历史中车辆与障碍物发生碰撞前与碰撞物体的制动距离,根据制动距离计算得到车辆行驶的安全距离,收集历史中车辆在不同制动距离发生碰撞时的环境数据,查找影响车辆安全距离的危险环境数据;
13、进一步的,根据制动距离计算得到车辆行驶的安全距离的具体步骤为:
14、s211、收集历史中车辆与障碍物发生碰撞前的制动距离为,表示收集的历史中第1、2、3、j个车辆与障碍物发生碰撞时的制动距离,j为正整数;
15、s212、根据收集的历史中车辆与障碍物发生碰撞前的制动距离计算车辆的安全距离,公式为:
16、;
17、公式中,l_a表示车辆在行驶中的安全距离,l_z表示为收集的历史中车辆与障碍物发生碰撞前的制动距离,l_st表示历史中车辆与障碍物发生碰撞前的制动距离的标准差,j为收集的历史中车辆与障碍物发生碰撞前的制动距离个数;将计算得到的车辆安全距离作为防止车辆发生碰撞的标准。
18、查找影响车辆安全距离的危险环境数据的具体步骤为:
19、s221、收集历史中历史中车辆在不同制动距离发生碰撞时的环境数据,设收集的不同制动距离发生碰撞时的环境数据为,表示收集的不同制动距离发生碰撞的第1、2、3、...、k种环境数据,提取每种环境数据在j次不同制动距离发生碰撞时的数据值;
20、s222、利用每种环境数据作为自变量,不同的制动距离作为变量绘制折线图,对绘制的k种环境数据和制动距离的折线图进行观察,计算折线图中相邻两点的差值,公式为:
21、;
22、公式中,l_c表示折线图中相邻两点的差值,表示折线图中后一个点的制动距离,表示折线图中前一个制动距离,r和r+1的取值范围均为1至j;计算得到j-1个制动距离差值;
23、s223、对计算得到的j-1个制动距离差值进行判断,当折线图中j-1个制动距离差值的符号均相同时,判断对应的环境数据为危险环境数据;当折线图中j-1个制动距离差值的符号存在至少一个不同时,判断对应的环境数据不为危险环境数据;对k种环境数据绘制的折线图均进行计算判断,得到危险环境数据为,,表示判断得到的第1、2、3、...、h种危险环境数据,h≤k,h为正整数。
24、在车辆行驶时的过程中,在不同的天气下产生的不同的环境数据会导致车辆行驶时的安全距离发生变化,例如:当雨天时由于地面湿滑,车辆的制动时间会大大减少,如果依旧根据正常的安全距离极大可能发生危险事故;并且不良天气造成的危险环境数据不仅只有地面湿滑,因此需要对影响安全距离的环境数据进行查找。
25、s300、收集不同危险环境数据时车辆行驶的安全距离,计算得到不同危险环境数据对车辆安全距离的影响关系;
26、进一步的,计算得到不同危险环境数据对车辆安全距离的影响关系的具体步骤为:
27、s301、提取出危险环境数据绘制的折线图,对每种危险环境数据折线图中的折线进行拟合得到趋势线,设趋势线的函数表达式为,表达式中l_z表示制动距离,h_w表示危险环境数据,a表示趋势线的斜率,b表示趋势线的截距;
28、s302、提取折线图中j个点的值,将j个点的值进行计算代入到函数表达式中得到表达式中a和b的值,公式为:
29、;
30、公式中,表示j个点中变量制动距离的平均值,表示j个点中自变量危险环境数据的平均值,j表示折线图中点的个数;
31、s303、对每种危险环境数据的折线图均进行计算,得到每种危险环境数据趋势线的函数表达式,将函数表达式作为每种危险环境数据对车辆安全距离的影响关系,最终得到h种危险环境数据的影响关系为,计算得到的第1、2、3、...、h种危险环境数据的影响关系。
32、s400、实时采集车辆行驶道路的危险环境数据,对车辆的安全距离进行优化;在车辆根据最优路径进行行驶时,利用毫米雷达波对路面状态进行测量,采集道路中车辆与物体的距离并根据优化后的安全距离,判断是否存在障碍物;
33、进一步的,对车辆的安全距离进行优化的具体步骤为:
34、s411、实时采集车辆行驶中的危险环境数据为,表示实时收集的车辆行驶中的第1、2、3、...、h种危险环境数据值;
35、s412、提取每种危险环境数据对安全距离的影响关系对安全距离进行优化,公式为:
36、;
37、公式中,l_ay表示利用危险环境数据进行优化后的安全距离,h表示危险环境数据的个数,h_w表示采集的每种实时危险环境数据。
38、判断是否存在障碍物的具体步骤为:
39、s421、在车辆根据最优路径想终点行驶的过程中,利用毫米雷达波对车辆行驶道路上的物体进行测量,收集实时车辆与物体之间的距离为j_s;
40、s422、利用优化后的安全距离对车辆与物体之间距离进行判断,当j_s>l_ay时,判断对应物体不会妨碍车辆行驶,不是障碍物车辆继续行驶;当j_s≤l_ay时,判断对应物体为车辆行驶中障碍物,发出躲避预警信号。
41、根据车辆行驶的实时危险环境数据对安全距离进行优化,可以保证车辆不会发生误判导致产生碰撞等危险事故,充分的考虑了环境数据对于车辆安全距离的影响,增加了车辆行驶的安全性。
42、s500、对判断得到的障碍物进行分析,将障碍物分为动态和静态障碍物,控制车辆分别对动态和静态障碍物进行躲避。
43、进一步的,控制车辆静态障碍物进行躲避的具体步骤为:
44、s511、当车辆在行驶过程中发现存在障碍物并发出躲避预警信号后,当障碍物为静态障碍物时,以障碍物为圆心,优化后安全距离l_op为半径构建一个圆形回路;
45、s512、控制车辆在障碍物的反方向行驶,利用毫米雷达波实时测量车辆与障碍物之间的距离,当实时距离为安全距离l_op时,控制车辆沿以障碍物为圆心的圆形回路上行驶;当车辆在圆形回路中与原最优路径重合时,控制车辆驶离圆形回路,重新按照最优路径行驶,完成车辆对静态障碍物的躲避。
46、对动态障碍物躲避的具体步骤为:
47、s521、当车辆行驶过程中判断存在障碍物并发出躲避预警信号后,当障碍物为动态障碍物时,以动态障碍物为圆心,优化后的安全距离为半径构建圆;根据动态障碍物运动的方向和圆的直径,预测出动态障碍物的运动路线;
48、s522、当发出躲避预警信号时,采集发出预警时车辆和动态障碍物的距离r,以车辆为原点建立坐标系,采集动态障碍物位于坐标系中的角度为;控制圆内的车辆向垂直于动态障碍物运动路线边缘的方向行驶,设车辆行驶速度为c_v,行驶时间为t,利用毫米雷达波实时采集车辆和动态障碍物之间的距离,并计算判断车辆是否成功躲避动态障碍物,公式为:
49、;
50、不等式中,l_s表示采集的车辆与动态障碍物的实时距离,c_v表示车辆的行驶速度,t表示行驶时间,r表示发出预警时车辆和动态障碍物的距离,表示发出预警时动态障碍物位于坐标系中的角度;判断当不等式成立时,车辆成功躲避动态障碍物,驶出动态障碍物的运动路线中,重新规划路线到达终点。
51、在判断车辆周围存在障碍物时,由于动态和静态障碍物的差异,对于动态和静态障碍物进行躲避时的方式也不相同,若使用相同的躲避方案会导致车辆产生碰撞,因此对障碍物进行分类躲避可以保证车辆根据不同的障碍物使用不同的躲避方法完成对障碍物的躲避。
52、与现有技术相比,本发明所达到的有益效果是:
53、1、本发明通过对车辆到达终点的路径进行筛选,对路径中的最大车速、最大红绿灯等待时间进行分析计算,得到每种路径到达终点所需要的时间,最终选择时间最短的最优路径;增加了车辆的工作效率,减少了能量的消耗。
54、2、本发明对车辆行驶过程中的安全距离进行确定,分析出车辆行驶过程中保证不会发生碰撞的安全距离,并根据安全距离对车辆周围物体进行判断,观察是否存在障碍物,自动完成对障碍物的躲避,使车辆可以安全到达终点。
55、3、本发明对车辆行驶中的环境数据进行收集分析,查找出影响车辆安全距离的危险环境数据,并分析出每种危险环境数据对安全距离的影响,根据实时危险环境数据计算得到优化后的安全距离;避免了车辆对于物体距离产生误判,增加车辆行驶的安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/155965.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表