一种火车远程智能摇杆鹤管臂装车控制装置的制作方法
- 国知局
- 2024-07-30 11:52:55
本发明涉及鹤管设备,具体为一种火车远程智能摇杆鹤管臂装车控制装置。
背景技术:
1、目前在各行业中,装卸液体介质的设备广泛采用装卸鹤管,又称液体装卸臂,主要用于汽车槽车、火车槽车或槽船装卸液体介质的装卸设备。装卸鹤管目前是石油、化工行业中的流体装卸专用设备,鹤管,顾名思义,一种可以伸缩移动的管子,多用于石油、化工码头液体装卸,管内介质如油、水等,铁路、公路装卸油鹤管主要用于铁路油槽车和公路油罐汽车的装卸流体作业的专用设备。
2、但现有技术中,目前在鹤管的使用过程中,当鹤管前端的垂管进行作业时,由于垂管受整体管道的调节性进行对接点的调整,当采用这种方式调整时,无法有效精准进行对接,仍然需要工作人员从旁进行辅助作业,使得整体的效率较低,因此就需要提出一种火车远程智能摇杆鹤管臂装车控制装置。
技术实现思路
1、本发明的目的在于提供一种火车远程智能摇杆鹤管臂装车控制装置,以解决上述背景技术提出在鹤管的使用过程中,当鹤管前端的垂管进行作业时,由于垂管受整体管道的调节性进行对接点的调整,当采用这种方式调整时,无法有效精准进行对接,仍然需要工作人员从旁进行辅助作业,使得整体效率较低的问题。
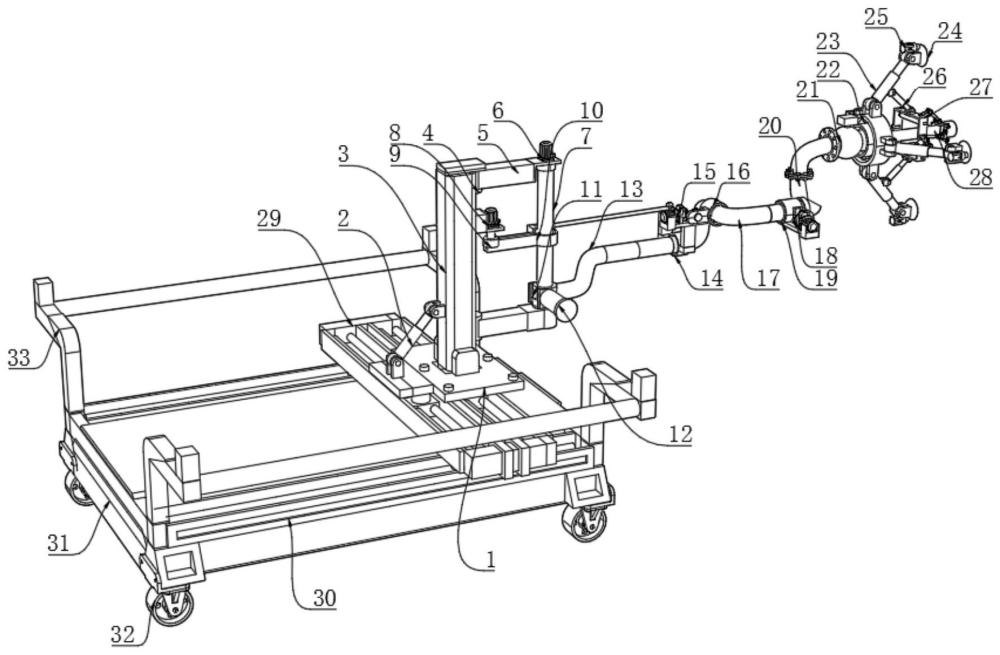
2、为实现上述目的,本发明提供如下技术方案:一种火车远程智能摇杆鹤管臂装车控制装置,包括基板,所述基板的轴心表面内部安装设置转动座,所述转动座的内部转动连接有立杆,所述立杆的侧壁表面铰接有两组转轴环柱,两组所述转轴环柱的侧壁表面均铰接有连接臂,一组所述连接臂的侧端通过下轴承连接设置转柱管,所述转柱管的侧端连通有第一调节臂管,所述第一调节臂管的侧端外部安装设置第一转动轴套,所述第一转动轴套的侧端内部转动连接有第二调节臂管,所述第二调节臂管的侧端外部套设有第二转动轴套,所述第二转动轴套的侧端内部转动连接有第三调节臂管,所述第三调节臂管的侧端外部安装设置控制阀件,所述第三调节臂管的侧端通过控制阀件连通设置自动调距伸缩管端,所述自动调距伸缩管端的内部连通设置有柔性补偿连接管,所述柔性补偿连接管的侧端连通有垂管,所述自动调距伸缩管端的外部周侧紧固连接有四组自主转动调节臂,四组所述自主转动调节臂的底臂杆外部均滑动连接有伸缩连接臂,所述伸缩连接臂的侧端紧固连接有中心校准组件;
3、所述中心校准组件包括方型连接框,所述方型连接框的内部安装设置三组线性导轨座,三组所述线性导轨座分别设置为沿x轴方向、沿y轴方向和沿z轴方向,三组所述线性导轨座的边侧均安装设置电动控制端,三组所述线性导轨座的内部通过线轨柱滑动连接有连接转动滑座,所述连接转动滑座的侧端均安装设置自动角度调节电机,所述连接转动滑座的侧端连接设置第一伸缩抵杆,所述第一伸缩抵杆的侧端连接设置铰接件,所述铰接件的侧端内部铰接有第二伸缩抵杆,所述第二伸缩抵杆的侧端紧固连接有夹持结构,所述夹持结构的两端对称安装自动锁合件,所述夹持结构的前端安装设置探测摄像端。
4、优选的,另一组所述连接臂的侧端通过上轴承连接设置调节转柱,另一组所述连接臂的顶部安装设置第一电机,所述调节转柱的中心外部套设连接有连接箍杆,所述连接箍杆的侧端连接设置轴座连接件,所述轴座连接件的顶部安装设置第二电机,所述第二电机通过电机底座和立杆的表面紧固连接,所述转柱管的侧端连通有排液管,所述四组所述自主转动调节臂的顶部侧端安装设置负压吸盘,所述负压吸盘的侧端连接设置微型负压泵。
5、优选的,所述第一调节臂管的外部套设有加强连接箍,所述加强连接箍的侧端紧固连接有第一调节组件,所述第二转动轴套的侧壁表面紧固连接有第二调节组件,所述第一调节组件和第二调节组件的结构相同。
6、优选的,所述第一调节组件包括电机固定座,所述电机固定座的顶部安装设置传动调节电机,所述传动调节电机的输出端连接设置第一锥齿轮,所述第一锥齿轮的侧端啮合连接有第二锥齿轮,所述第二锥齿轮的轴心端连接有转动套轴,所述转动套轴的外部设置固定件,所述转动套轴在固定件的内部转动,并通过连接套杆件和第二调节臂管紧固连接。
7、优选的,所述加强连接箍的另一侧端表面紧固连接有加强稳固支撑杆,所述加强稳固支撑杆的侧端和连接箍杆的侧壁表面紧固连接。
8、优选的,所述立杆的侧壁表面紧固连接有调节液压杆,所述调节液压杆的底部和基板的顶壁侧端紧固连接。
9、优选的,所述基板的底部通过两组第一调节滑座连接设置第一调节底轨,所述第一调节底轨的底部通过第二调节滑座连接设置第二调节底轨。
10、优选的,所述第二调节底轨的底部安装设置车驱动agv底座,所述车驱动agv底座的底部四端紧固安装驱动轮。
11、优选的,所述车驱动agv底座的两端安装设置有防护架,所述防护架的外部设置plc控制器。
12、优选的,所述车驱动agv底座的内部分别设置有远程信号接收器、信号放大器和单片处理机。
13、与现有技术相比,本发明的有益效果是:
14、1、本发明中,通过在中心校准组件配合下,当控制阀件、自动调距伸缩管端、柔性补偿连接管和垂管进行对接作业时,四组自主转动调节臂同步根据探测摄像端所探测的图像信号,进行启动调节,使得四组自主转动调节臂进行扩张,带动负压吸盘和微型负压泵与所接触的被采取设备表面进行接触,并利用微型负压泵使得负压吸盘进行负压吸附,保障后续柔性补偿连接管和垂管进行作业的稳定性,接着利用伸缩连接臂带动方型连接框位移柔性补偿连接管的外部,接着利用电动控制端分别带动三组线性导轨座进行启动,使得连接转动滑座在三组线性导轨座的内部分别带动自动角度调节电机、第一伸缩抵杆、铰接件、第二伸缩抵杆、夹持结构和自动锁合件进行x轴方向、沿y轴方向和沿z轴方向的调节作业,且便于在第一伸缩抵杆、铰接件、第二伸缩抵杆的联动配合下,使得夹持结构和自动锁合件带动柔性补偿连接管和垂管的连接部位进行校准调节,使得垂管可以精准性自动化和被采取设备的输出口进行连接,并在自动调距伸缩管端的配合下,使得柔性补偿连接管和垂管根据所采取液位进行自动延展调节,进行作业,使得有效精准进行对接,整体形成自动化远程作业操作,提高作业效率。
15、2、本发明中,通过在第一调节组件和第二调节组件配合下,便于利用第一调节组件和第二调节组件的控制调节,便于分别形成对第二调节臂管和第三调节臂管转动调节控制,使得第二调节臂管和第三调节臂管分别根据所受力的转动方向进行转动,即使得传动调节电机启动,利用传动调节电机带动第一锥齿轮进行转动,从而使得第二锥齿轮同步进行啮合转动连接,进而在第二锥齿轮的转动力带动下,使得转动套轴在固定件内部进行转动,通过连接套杆件带动第二调节臂管在第一转动轴套的侧端内部进行转动调节,第二调节组件的作业方式相同,使得第三调节臂管在第二转动轴套的侧端内部进行转动调节,从而整体的鹤管臂可以根据需求进行多角度,多方位调节转动,进一步提高作业效率。
16、3、本发明中,通过在第一调节底轨、第二调节底轨、调节液压杆和转动座配合下,使得第一调节底轨和第二调节底轨配合下,便于在作业中,带动基板根据整体鹤管臂的作业进行调节,形成初始定位辅助,便于提高后续垂管连接作业的精准性,且基板可通过紧固螺栓和第一调节底轨和第二调节底轨进行拆卸分离,使得形成为单独作业置地紧固方式,可根据用户需求进行调节,同时也可以在调节液压杆的作用下,当整体鹤管臂调节时,根据位置关系,带动立杆在转动座配合下,沿着鹤管臂的作业反向进行角度调节,便于自动化根据整体鹤管臂的作业进行辅助调节。
本文地址:https://www.jishuxx.com/zhuanli/20240730/158105.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表