一种窨井式检测泵站的机器人的制作方法
- 国知局
- 2024-07-30 12:03:32
本发明涉及管道检测机器人,具体为一种窨井式检测泵站的机器人。
背景技术:
1、管道是窨井泵站的运输污水、雨水的重要装备,然而管道可能存在的制造缺陷以及在服役中由于流动介质的冲刷、环境腐蚀、外力破坏等的影响,容易造成复杂多样的故障;
2、在现有技术中,主要是通过检查人员手持超声探头在管道表面进行扫查或者人工安装环向扫查器进行环向扫查,从而获得超声信号,以判断管道的腐蚀情况,由于管道的布置错综复杂,检查人员劳动强度大,对检查人员造成了很大的不便。
技术实现思路
1、本发明的目的在于提供一种窨井式检测泵站的机器人,以解决上述背景技术中提出的问题。
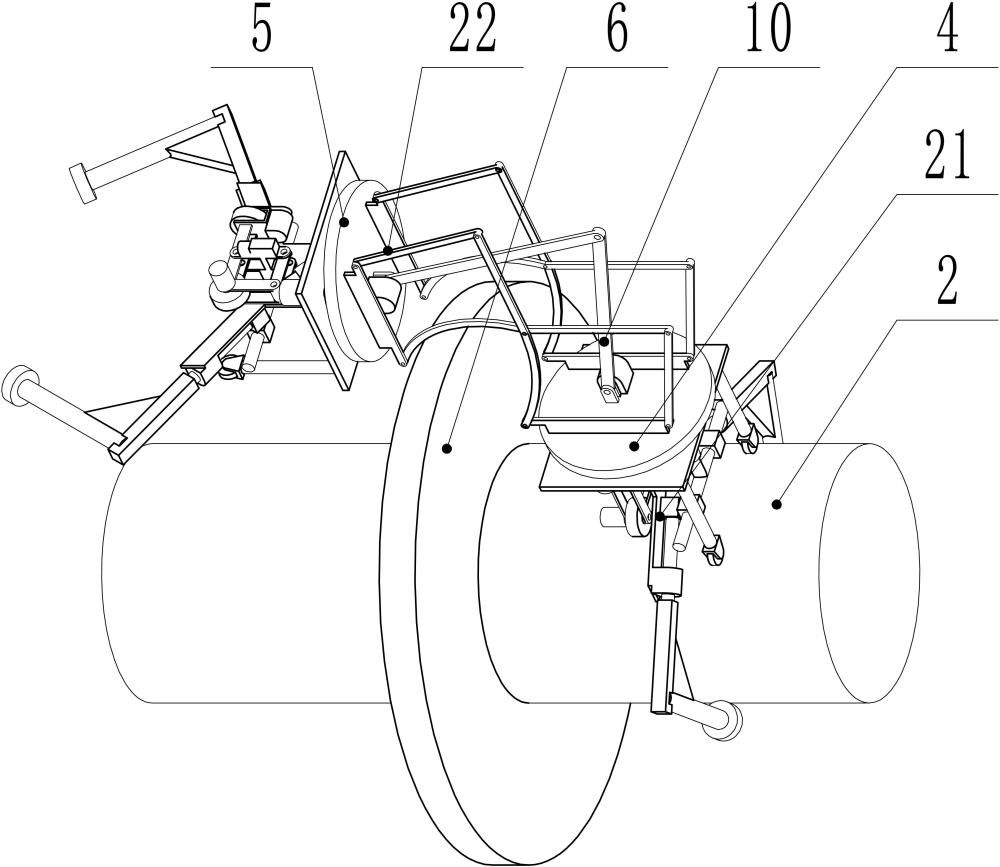
2、为实现上述目的,本发明提供如下技术方案:包括行走组件、折叠组件和超声探头,所述行走组件共有两套,分别为a行走组件和b行走组件,行走组件能够在管道上移动,每套行走组件上固定有所述超声探头,行走组件顶部固定有转位电机,转位电机能够驱动转盘,每套行走组件顶部各转动的设置有一套转盘,两套转盘分别为a转盘和b转盘,两套转盘之间通过折叠组件连接;
3、折叠组件包括a长连杆、a短连杆、b长连杆和b短连杆,所述a短连杆的一端铰接在a转盘上a点,a短连杆另一端铰接在b长连杆上b点,b长连杆上c点铰接有a长连杆,a长连杆上d点铰接到a转盘,a长连杆上e点铰接有b短连杆的一端,b短连杆的另一端铰接到b转盘上f点,b长连杆上g点铰接到b转盘上,abcd四点围成一个平行四边形,ab长和ad长相等,cfeg四点围成一个平行四边形,fg长和fe长相等,bg长和de长相等;
4、a转盘上铰接有a驱动杆,b转盘上铰接有b驱动杆,a驱动杆和b驱动杆相互铰接,a驱动杆和b驱动杆等长,a驱动杆由固定在a转盘上的a驱动电机驱动,b驱动杆由固定在b转盘上的b驱动电机驱动。
5、优选的,行走组件包括夹紧机构、主动轮机构和机架,所述机架上固定有超声探头,机架顶部固定有转位电机,机架顶部转动的设置有转盘,机架上连接有夹紧机构和主动轮机构,夹紧机构能够将机架夹紧在管道上;
6、主动轮机构包括轴向轮、径向轮和切换电动推杆,机架上铰接有切换横杆,切换横杆的两端分别转动的设置有轴向轮和周向轮,轴向轮能够沿着管道轴线方向滚动,周向轮能够沿着管道圆周方向滚动,轴向轮由固定在切换横杆上的轴向电机驱动,周向轮由固定在切换横杆上的周向电机驱动,周向轮上铰接有过渡连杆的一端,过渡连杆的另一端铰接有连架横杆的一端,连架横杆的另一端铰接在机架上,过渡连杆和连架横杆的铰接点上铰接有所述切换电动推杆的一端,切换电动推杆的另一端铰接在机架上。
7、优选的,夹紧机构包括夹紧电动推杆、驱动横杆、两个支腿和两个辅助轮,每个辅助轮转动的设置在对应的支腿上,辅助轮能够沿着管道轴向方向滚动,支腿滑动的设置在机架上,支腿能够沿着管道的径向滑动,所述夹紧电动推杆固定在机架上,夹紧电动推杆的活动端固定有所述驱动横杆,驱动横杆的两端分别滑动的设置有滑块,滑块铰接在支腿上。
8、优选的,轴向轮套设有摩擦垫,摩擦垫横截面为三角形。
9、优选的,机架下方转动的设置有万向轮。
10、与现有技术相比,本发明的有益效果是:将超声探头固定在行走组件上,由行走组件带动超声探头对管道进行检查,便于对错综复杂的管道进行检查,降低了劳动强度,行走组件共有两套,两套行走组件通过折叠组件连接,通过折叠组件能够越过管接头、三通管等障碍物,提高了通过性,便于操作,折叠组件的驱动电机通过两根驱动杆相互铰接驱动转盘运动,具有更小的压力角,提高了传动效率。
技术特征:1.一种窨井式检测泵站的机器人,其特征在于:包括行走组件、折叠组件(10)和超声探头(1),所述行走组件共有两套,分别为a行走组件(21)和b行走组件(22),行走组件能够在管道(2)上移动,每套行走组件上固定有所述超声探头(1),行走组件顶部固定有转位电机(3),转位电机(3)能够驱动转盘,每套行走组件顶部各转动的设置有一套转盘,两套转盘分别为a转盘(4)和b转盘(5),两套转盘之间通过折叠组件(10)连接;
2.根据权利要求1所述的一种窨井式检测泵站的机器人,其特征在于:行走组件包括夹紧机构(23)、主动轮机构(24)和机架(25),所述机架(25)上固定有超声探头(1),机架(25)顶部固定有转位电机(3),机架(25)顶部转动的设置有转盘,机架(25)上连接有夹紧机构(23)和主动轮机构(24),夹紧机构(23)能够将机架(25)夹紧在管道(2)上;
3.根据权利要求2所述的一种窨井式检测泵站的机器人,其特征在于:夹紧机构(23)包括夹紧电动推杆(34)、驱动横杆(35)、两个支腿(36)和两个辅助轮(37),每个辅助轮(37)转动的设置在对应的支腿(36)上,辅助轮(37)能够沿着管道(2)轴向方向滚动,支腿(36)滑动的设置在机架(25)上,支腿(36)能够沿着管道(2)的径向滑动,所述夹紧电动推杆(34)固定在机架(25)上,夹紧电动推杆(34)的活动端固定有所述驱动横杆(35),驱动横杆(35)的两端分别滑动的设置有滑块(38),滑块(38)铰接在支腿(36)上。
4.根据权利要求2所述的一种窨井式检测泵站的机器人,其特征在于:轴向轮(26)套设有摩擦垫(39),摩擦垫(39)横截面为三角形。
5.根据权利要求2所述的一种窨井式检测泵站的机器人,其特征在于:机架(25)下方转动的设置有万向轮(40)。
技术总结本发明公开了一种窨井式检测泵站的机器人,包括行走组件、折叠组件和超声探头,所述行走组件共有两套,分别为A行走组件和B行走组件,行走组件能够在管道上移动,行走组件顶部固定有转位电机,转位电机能够驱动转盘,转盘转动的设置在行走组件顶部,两套转盘之间通过折叠组件连接,将超声探头固定在行走组件上,由行走组件带动超声探头对管道进行检查,便于对错综复杂的管道进行检查,降低了劳动强度,行走组件共有两套,两套行走组件通过折叠组件连接,通过折叠组件能够越过管接头、三通管等障碍物,提高了通过性,便于操作,折叠组件的驱动电机通过两根驱动杆相互铰接驱动转盘运动,具有更小的压力角,提高了传动效率。技术研发人员:谢青宝,赵楠,云霞,高屹受保护的技术使用者:内蒙古宝立科技有限公司技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240730/158565.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种自动包装机的制作方法
下一篇
返回列表