基于神经网络算法的船舱集装箱模拟绑扎分析方法、介质及系统与流程
- 国知局
- 2024-07-31 22:38:41
本发明属于船舱试箱,特别涉及基于神经网络算法的船舱集装箱模拟绑扎分析方法、介质及系统。
背景技术:
1、在集装箱船行业中,传统的绑扎方式通常涉及多个步骤。在绑扎过程中,工作人员需手动识别集装箱上的绑扎点,但这种方式容易受到天气条件和船舶运动的影响,绑扎结果往往依赖于工人的经验和技巧,存在一定的误差和不确定性;而且人工操作需要耗费大量时间和人力资源,降低了工作效率和生产率。
技术实现思路
1、本发明的目的是为了解决上述技术的不足,提供基于神经网络算法的船舱集装箱模拟绑扎分析方法、介质及系统。
2、为此,第一方面,本发明提供基于神经网络算法的船舱集装箱模拟绑扎分析方法,包括以下步骤:
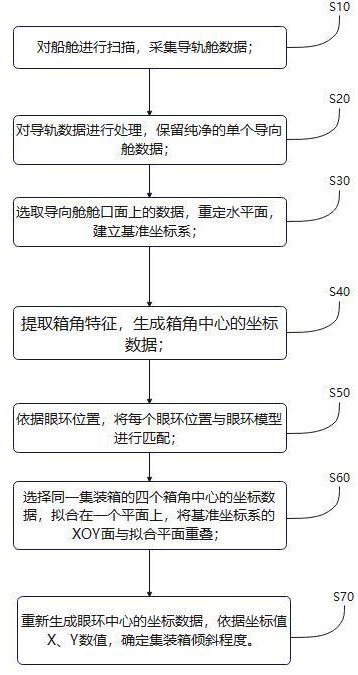
3、s10:对船舱进行扫描,采集导轨舱数据;
4、s20:对导轨数据进行处理,保留纯净的单个导向舱数据;
5、s30:选取导向舱舱口面上的数据,重定水平面,建立基准坐标系;
6、s40:提取箱角特征,生成箱角中心的坐标数据;
7、s50:依据眼环位置,将每个眼环位置与眼环模型进行匹配;
8、s60:选择同一集装箱的四个箱角中心的坐标数据,拟合在一个平面上,将基准坐标系的xoy面与拟合平面重叠;
9、s70:重新生成眼环中心的坐标数据,依据坐标值x、y数值,确定集装箱倾斜程度。
10、进一步的,对导轨数据进行处理,保留纯净的单个导向舱数据的具体步骤为:
11、在扫描生成的点云模型中,通过导轨舱的分界线,拉框删除其他舱位数据,并删除离群点,留下单个导向舱的纯净点云模型。
12、进一步的,选取导向舱舱口面上的数据,重定水平面,建立基准坐标系的具体步骤为:
13、在导向舱舱口面上选取3个以上的水平基准点,利用水平基准点拟合出一个平面作为水平面;
14、选择相互正对的两个轨道的3个以上个点,进行平面拟合,得到平面后将该平面的法线转动到y方向;
15、将船舱的船艏艉方向定为x方向,船横向方向为y方向,竖直方向为z方向。
16、进一步的,提取箱角特征,生成箱角中心的坐标数据的具体步骤为:
17、建立卷积神经网络模型,用于生成箱角中心,卷积神经网络模型结构包括:
18、多个卷积层,每个卷积包含多个卷积核,用于获取不同层次的特征;
19、全连接层,将卷积层的输出映射到最终的箱角中心;
20、输出层,生成集装箱箱角中心的预测值;
21、对卷积神经网络进行训练,使用均方误差作为损失函数,用于衡量模型预测值与实际箱角中心之间的差异,使用随机梯度下降优化器。
22、进一步的,对卷积神经网络进行训练的具体步骤为:
23、数据准备,将点云数据转换为模型可接受的格式,并配对每个数据点与其对应的箱角中心标签;
24、网络初始化,随机初始化神经网络的参数;
25、前向传播,将数据通过网络,计算输出,并计算损失函数的值;
26、反向传播,根据损失函数的梯度,使用反向传播算法更新网络参数;
27、迭代训练,重复上述步骤,直到达到停止条件。
28、进一步的,依据眼环位置,将每个眼环位置与眼环模型进行匹配具体步骤为:
29、对眼环点云数据进行预处理,将无效点云数据进行删除;
30、选择所有眼环位置,将每个眼环点云与眼环模型相匹配;
31、若无法匹配得到,则该眼环位置是错误的;若能够匹配,则选择匹配率最高的眼环模型,并将该眼环模型置于该眼环位置上。
32、进一步的,选择所有眼环位置,将每个眼环点云与眼环模型相匹配的具体步骤为:
33、已有的个眼环模型如下,且以此表示眼环模型的原始位置:
34、;
35、其中在每个眼环模型中的中心位置是眼环模型决定且确定的,其中心坐标为:
36、;
37、眼环模型默认在原始位置,因此任意位置和方向的眼环模型的眼环中心位置可以借助矩阵,用以下公式表示:
38、;
39、其中i表示第i个眼环模型,j表示第j个眼环点云,共i·j个矩阵;
40、设有个分割出来的眼环点云,以匹配率的方式将每个眼环点云找到其对应的正确眼环模型,即找到一个映射:
41、;
42、对于眼环点云和眼环模型的关系,用匹配算法可以得到个匹配矩阵,其中匹配算法使用的icp或pfh,则:
43、;
44、定义最优的匹配率如下:眼环点云所属眼环模型的点的数量是,该眼环点云点数量为,
45、;
46、眼环点云中所属眼环模型的点如下定义:对眼环点云中任意点,对眼环模型中的每个三角形进行计算,其中分别是该三角形的三个点,求平面过程可得三角形所属平面为:
47、;
48、当点满足条件:
49、;
50、且
51、;
52、其中为输入的参数,表示推荐距离阈值;
53、可解得当时
54、;
55、;
56、则最终对每个点云的眼环位置。
57、第二方面,本发明提供一种计算机可读存储介质,计算机可读存储介质存储有程序指令,用于执行上述的基于神经网络算法的船舱集装箱模拟绑扎分析方法。
58、第三方面,本发明提供基于神经网络算法的集装箱船舱试箱模拟分析系统,包含上述的计算机可读存储介质。
59、本发明提供基于神经网络算法的船舱集装箱模拟绑扎分析方法,有如下有益效果:
60、本系统软件投入实际工作,能效较传统作业数以几十倍的提升,并且无需人工爬高测量,杜绝了原有测量检测方式的安全隐患,为安全高效生产提高了可靠保障。
61、本软件利用扫描的点云数据,通过计算方法精确地提取出绑扎孔和堆锥孔的位置,避免了手动和人眼识别的误差和不确定性。这种自动化的方法能够提高绑扎的准确性和一致性,降低了意外事件的发生风险。同时,通过计算和反馈,可以帮助工作人员快速准确地确定绑扎位置和绑扎角度、方式,提高了工作效率和生产率。因此,该方法具有明显的优势,可以改善传统绑扎方式存在的问题,提升了集装箱船行业的安全性和效率。
技术特征:1.基于神经网络算法的船舱集装箱模拟绑扎分析方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于神经网络算法的船舱集装箱模拟绑扎分析方法,其特征在于,对导轨数据进行处理,保留纯净的单个导向舱数据的具体步骤为:
3.根据权利要求1所述的基于神经网络算法的船舱集装箱模拟绑扎分析方法,其特征在于,选取导向舱舱口面上的数据,重定水平面,建立基准坐标系的具体步骤为:
4.根据权利要求1所述的基于神经网络算法的船舱集装箱模拟绑扎分析方法,其特征在于,提取箱角特征,生成箱角中心的坐标数据的具体步骤为:
5.根据权利要求4所述的基于神经网络算法的船舱集装箱模拟绑扎分析方法,其特征在于,对卷积神经网络进行训练的具体步骤为:
6.根据权利要求1所述的基于神经网络算法的船舱集装箱模拟绑扎分析方法,其特征在于,依据眼环位置,将每个眼环位置与眼环模型进行匹配具体步骤为:
7.根据权利要求6所述的基于神经网络算法的船舱集装箱模拟绑扎分析方法,其特征在于,选择所有眼环位置,将每个眼环点云与眼环模型相匹配的具体步骤为:
8.一种计算机可读存储介质,其特征在于,计算机可读存储介质存储有程序指令,用于执行权利要求1-7的基于神经网络算法的船舱集装箱模拟绑扎分析方法。
9.基于神经网络算法的集装箱船舱试箱模拟分析系统,其特征在于,包含权利要求8所述的计算机可读存储介质。
技术总结本发明提供基于神经网络算法的船舱集装箱模拟绑扎分析方法、介质及系统,可广泛应用于船舱试箱领域;分析方法具体包括以下步骤:对船舱进行扫描,采集导轨舱数据;对导轨数据进行处理,保留纯净的单个导向舱数据;选取导向舱舱口面上的数据,重定水平面,建立基准坐标系;提取箱角特征,生成箱角中心的坐标数据;依据眼环位置,将每个眼环位置与眼环模型进行匹配;选择同一集装箱的四个箱角中心的坐标数据,拟合在一个平面上,将基准坐标系的XOY面与拟合平面重叠;重新生成眼环中心的坐标数据,依据坐标值X、Y数值,确定集装箱倾斜程度。技术研发人员:万志波,董友强,王天远,高刚刚,綦晓军,吴迪,孟得胜,张倩倩受保护的技术使用者:青岛海徕天创科技有限公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/193974.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表