一种面向行驶车辆的轨迹分类与预测方法
- 国知局
- 2024-07-31 22:53:09
本发明涉及智能交通领域,具体涉及一种面向行驶车辆的轨迹分类与预测方法。
背景技术:
1、随着现代交通技术的不断发展,特别在自动驾驶领域与智能交通应用领域,汽车在正常的马路上行驶时状态多样,汽车的运动模式可能包括直线行驶、变速行驶和转弯运动等多种情况,如何对车辆行驶行为的轨迹预测和分类成为了研究的核心问题。
2、传统意义上,线性模型如卡尔曼滤波(kalman filter,kf)已被广泛应用于车辆行驶行为的轨迹分类与预测任务,但它们难以捕捉汽车多变的动态行为,如直线行驶、转弯和加速。这些复杂行为超出了线性模型的有效范围,导致预测与分类不准确。为此,拓展卡尔曼滤波(extended kalman filter,ekf)应运而生,它通过对非线性系统进行线性化,提供了一种更为有效的非线性动态估计方法,这为在复杂的车辆行驶场景中实现更精确和可靠的轨迹分类与预测提供了新的可能性。但公布号为cn114970211a的专利申请文献中提出的多项式非线性高阶扩展卡尔曼滤波器虽然在非线性问题上有优势,但未明确如何处理状态转移概率的变化,在处理非齐次markov过程中的状态跳转时不如imm算法灵活;而且该高阶扩展卡尔曼滤波器不具备类似多模型融合的能力,在处理多种运动模式切换的目标时存在局限性。
3、同样仅靠单一的滤波模型,难以匹配车辆运动过程中状态,为解决此问题,交互式多模型(interacting multiple model,imm)被提出,它允许在多个动态模型之间进行服从马尔可夫markov特性切换,来更好地适应实际行驶情境。在imm交互式多模型中,传统的齐次markov模型被广泛运用,这表示系统的状态转移是根据齐次markov过程来模拟的,其下一个状态仅取决于当前状态,而与过去的状态无关,但齐次markov模型也存在着局限性,对于某些高度非线性或复杂的系统,单一传统的齐次markov模型可能无法捕捉到关键的动态特性,这可能限制了imm在这些情境下的有效性,而且具有固定转移概率的传统齐次markov模型缺乏对车辆数据随时间变化趋势的适应性。比如公布号为cn107045125a的专利申请文献所提出的方案中,imm与ekf实施过程中采用的就是传统齐次markov过程,即模型转移概率恒定不变,这可能会导致无法捕捉关键的动态信息。同样地,在公布号为cn113903010a的专利申请文献中提出采用imm算法跟踪车辆的运动轨迹,输出车辆的位置和速度信息,所采用的也是传统齐次markov下imm算法,无法适应数据动态变化,预测效果较差,且所采用的imm算法包括m1、m2和m3模型并不能涵盖所有方向上的运动轨迹,能够展示imm处理后的效果的只有车辆位置信息,结果比较单一。
4、与之相比,非齐次markov模型在某些复杂场景下能够提供齐次markov模型所不能提供的额外灵活性和能力,通过采用线性插值,非齐次markov模型基于时间变化动态调整状态转移矩阵元素,从而更准确地描述目标运动变化,并更好地适应数据中的时间相关性模式。与传统的齐次markov模型相比,非齐次markov模型具有较高的预测精度,因此,在这个方向上改进交互式多模型imm已然成为一个创新点。
5、在相关技术中,公布号为cn107452017a的专利申请文献中提出了通过非齐次markov跳变系统建模形成的机动目标运动模型,非齐次markov模型是通过期望最大化(expectation maximization,em)算法计算出来的,在该方法中,利用viterbi算法获得非齐次转移概率在最大后验概率准则下的估计表达式,并在此基础上对交互式多模型算法进行改进。首先从算法复杂度与计算效率来看:viterbi算法和em算法在估计非齐次markov模型的转移概率时,尽管可以在最大后验概率准则下获得准确的估计,但这两种算法通常涉及到迭代计算,尤其是em算法在处理大规模数据时会面临较高的计算复杂度和时间消耗;其次从实现简便性与易用性来看:viterbi算法和em算法也需要专业的统计知识和理解复杂的算法逻辑,对于一些非专业背景的开发者或研究者来说,实现难度较大;从灵活性与适应性来看:viterbi算法和em算法虽然在某些情况下能够提供准确的模型估计,但当遇到数据分布显著变化或模型参数需要动态调整时,需要重新进行复杂的计算,最后viterbi算法和em算法也并不适用于快速部署的实际应用场景,比如实时预测车辆轨迹与运动状态。
技术实现思路
1、本发明所要解决的技术问题在于如何提高车辆轨迹分类的预测与跟踪精度。
2、本发明通过以下技术手段解决上述技术问题的:
3、本发明提出了一种面向行驶车辆的轨迹分类与预测方法,包括:
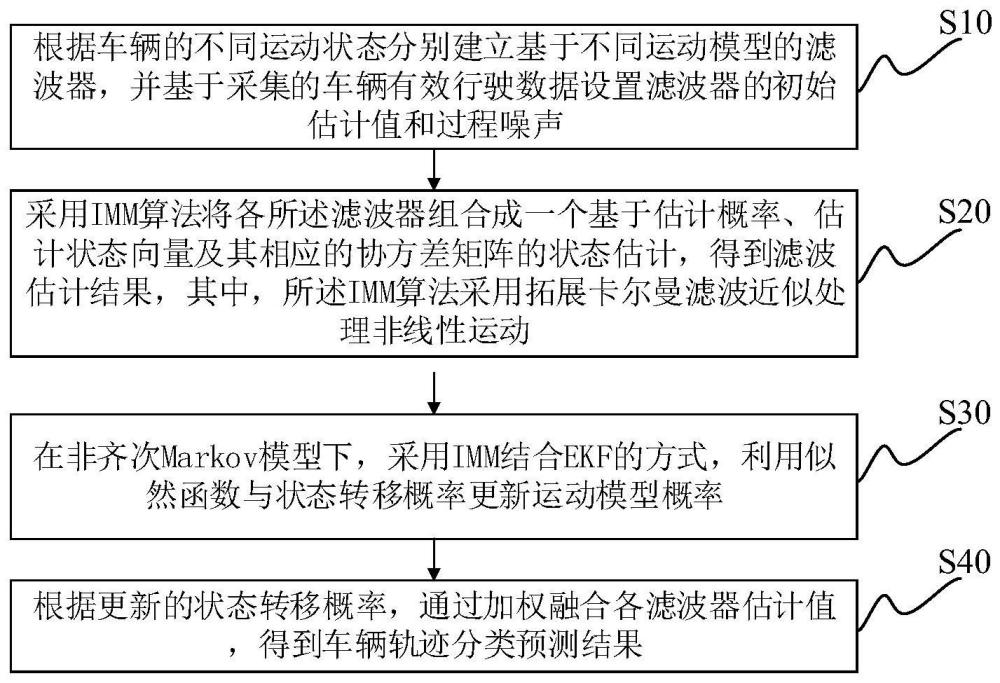
4、根据车辆的不同运动状态分别建立基于不同运动模型的滤波器,并基于采集的车辆有效行驶数据设置滤波器的初始估计值和过程噪声;
5、采用imm算法将各所述滤波器组合成一个基于估计概率μj、估计状态向量及其相应的协方差矩阵pj的状态估计,得到滤波估计结果,其中,所述imm算法采用拓展卡尔曼滤波近似处理非线性运动;
6、在非齐次markov模型下,采用imm结合ekf的方式,利用似然函数与状态转移概率更新运动模型概率;
7、根据更新的状态转移概率,通过加权融合各滤波器估计值,得到车辆轨迹分类预测结果。
8、进一步地,所述运动模型包括匀速直线模型、匀变速直线模型和转弯模型。
9、进一步地,所述匀速直线模型的状态方程为:
10、
11、所述匀速直线模型的观测方程为:
12、zk=hkxk+vk
13、式中,xk+1是k+1时刻的目标状态向量,xk是k时刻的目标状态向量,v是速度,θ是运动方向的角度,wk是过程噪声,反映模型中随机变化的部分,通常假设为高斯噪声,zk是k时刻的观测数据,vk是观测噪声,表示测量中的随机误差,通常假设是高斯噪声,hk是观测矩阵,用于将状态空间映射到观测空间,这个矩阵决定了如何从状态变量得到观测量,
14、进一步地,所述匀变速直线模型的状态方程为:
15、
16、所述匀变速直线模型的观测方程为:
17、zk=hkxk+vk
18、式中,xk+1是k+1时刻的目标状态向量,xk是k时刻的目标状态向量,v是速度,θ是运动方向的角度,wk是过程噪声,反映模型中随机变化的部分,通常假设为高斯噪声,zk是k时刻的观测数据,vk是观测噪声,表示测量中的随机误差,通常假设是高斯噪声,hk是观测矩阵,用于将状态空间映射到观测空间,这个矩阵决定了如何从状态变量得到观测量,
19、进一步地,所述转弯模型的状态方程为:
20、
21、所述转弯模型的观测方程为:
22、zk=hkxk+vk
23、式中,xk+1是k+1时刻的目标状态向量,xk是k时刻的目标状态向量,v是速度,θ是运动方向的角度,ω是转弯的角速度,wk是过程噪声,反映模型中随机变化的部分,通常假设为高斯噪声,zk是k时刻的观测数据,vk是观测噪声,表示测量中的随机误差,通常假设是高斯噪声,hk是观测矩阵,用于将状态空间映射到观测空间,这个矩阵决定了如何从状态变量得到观测量,
24、进一步地,所述车辆有效行驶数据的采集过程包括:
25、采集车辆原始数据,所述车辆原始数据包括行驶时间、行驶车道、车辆行驶偏转角度、车辆类型、车辆行驶位置坐标、车辆行驶速度以及车辆标识;
26、将所述车辆原始数据按照车辆标识进行拆分,获得车辆标识对应的数据集;
27、基于车辆标识、车辆行驶位置坐标和车辆类型筛选得到合法正确的车辆行驶数据;
28、采用三次样条插值法对所述车辆行驶数据进行拟合,得到所述车辆有效行驶数据。
29、进一步地,所述imm算法采用拓展卡尔曼滤波近似处理非线性运动,包括:
30、对所述运动模型中非线性的状态方程进行一阶泰勒展开,并计算雅可比矩阵,将状态方程近似为线性的状态方程;
31、对所述运动模型中的观测方程进行离散化处理,得到近似为线性的观测方程。
32、进一步地,所述对所述运动模型中非线性的状态方程进行一阶泰勒展开,并计算雅可比矩阵,将状态方程近似为线性的状态方程,包括:
33、假设目标的运动模型的状态方程为:
34、x(k+1)=f(x(k))+g(k)w(k);
35、对状态方程中的f(·)在处进行一阶泰勒展处理可得:
36、
37、其中:
38、
39、是jacobians矩阵,令:
40、
41、将状态方程近似为线性的状态方程为:
42、
43、
44、式中,x(k+1)是下一个时间步长k+1的状态预测值,x(k)是当前时间步长k的状态估计值,f(·)是状态转移函数,它描述了系统如何从当前状态x(k)转移到下一个状态x(k+1),g(k)是系统噪声的影响矩阵,用于将过程噪声的影响加入到状态转移中,w(k)是过程噪声,是当前时间步长k的状态估计值,通常用于更新过程中,x(n)是状态向量x(k)的第n个元素,也就是一个特定的状态变量,f(k)是状态转移函数f(·)相对于状态x(k)的偏导数,是状态更新时加入的非线性函数f(·)的一阶泰勒展开,这个函数体现了系统的预测模型,它通过f(k)矩阵来线性化状态转移函数。
45、进一步地,所述在非齐次markov模型下,采用imm结合ekf的方式,利用似然函数与状态转移概率更新运动模型概率,公式表示为:
46、sj[k]=r[k]+hpjp[k]ht
47、
48、
49、
50、式中,λj(k)是时间步长k时第j个滤波器的似然函数值,≡是恒等符号,sj[k]是时刻k第j个运动模型更新的协方差矩阵,αj[k]是时间步长k时第j个滤波器的残差,n是滤波器的总数,z[k]是时刻k时的观测值,h是输出矩阵,是时间步长k时第j个滤波器的预测状态,r[k]是测量噪声的协方差矩阵,pjp[k]是时间步长k时第j个滤波器的预测误差协方差矩阵,ht是观测矩阵,将状态空间映射到观测空间,pij[k]为k时刻模型i到模型j的转移概率,随着时间变化概率会发生改变,uj[k]为更新后模型j的概率,ui[k]是时刻k模型i的概率。
51、进一步地,所述时间步长k时第j个滤波器的预测状态和时间步长k时第j个滤波器的预测误差协方差矩阵pjp[k]的公式表示为:
52、
53、式中,fj为第j个运动模型的过渡矩阵,qj为第j个运动模型的协方差矩阵,δt为上次接触后经过的时间,为第j个模型在时间步k-1的初始状态估计,p0j[k-1]为第j个模型在时间步k-1的初始误差协方差矩阵,qj为过程噪声协方差矩阵,n为滤波器的总数。
54、本发明的优点在于:
55、(1)本发明采用的拓展卡尔曼滤波在imm框架中发挥了关键作用,用于近似并处理各个运动模型下的非线性系统,确保了准确的状态估计,并且本发明在传统的齐次markov模型上改进imm,变为非齐次markov模型下的imm,非齐次markov模型克服了传统齐次markov模型不能适应车辆数据时间相关性的缺陷,能够有效地融合来自不同运动模型的信息,从而提高了车辆数据的轨迹分类和预测准确性。
56、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240730/195175.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。